Potrebbero piacerti anche
- Introduction to Fly-by-Wire Flight Control Systems: The professional pilot’s guide to understanding modern aircraft controlsDa EverandIntroduction to Fly-by-Wire Flight Control Systems: The professional pilot’s guide to understanding modern aircraft controlsNessuna valutazione finora
- ANSI PTC 19.3 TW Prefomance Test Code PDFDocumento0 pagineANSI PTC 19.3 TW Prefomance Test Code PDFJairo Wilches0% (1)
- Vibration Analysis For Reciprocating Compressors Part 1 1681772666Documento8 pagineVibration Analysis For Reciprocating Compressors Part 1 1681772666Mohamed F. OmarNessuna valutazione finora
- Yeo StructuralLoads AHS 2014 PDFDocumento26 pagineYeo StructuralLoads AHS 2014 PDFKarad KaradiasNessuna valutazione finora
- ATA 32-Landing Gear DIFF R26Documento81 pagineATA 32-Landing Gear DIFF R26NadirNessuna valutazione finora
- Reducing Vibration by Balancing Rotor Blades: ReprintDocumento5 pagineReducing Vibration by Balancing Rotor Blades: Reprintmipaoll70Nessuna valutazione finora
- Vibration Analysis Including Stator Rotor Hou 2018 Journal of Electrical SDocumento14 pagineVibration Analysis Including Stator Rotor Hou 2018 Journal of Electrical SSathish KumarNessuna valutazione finora
- The Space RaceDocumento15 pagineThe Space RaceRadu Petrusan100% (1)
- Rotor Track and Balance ImprovementsDocumento9 pagineRotor Track and Balance ImprovementsEric BechhoeferNessuna valutazione finora
- Article Balancing of Rotor Blades PDFDocumento5 pagineArticle Balancing of Rotor Blades PDFClaudio SalicioNessuna valutazione finora
- 7230 CompressorDocumento57 pagine7230 Compressorrobiny100% (1)
- Rolling Element Bearings Vibration AnalysisDocumento10 pagineRolling Element Bearings Vibration AnalysisSiva Kulanji100% (1)
- 062 - Radio Navigation - QuestionsDocumento44 pagine062 - Radio Navigation - QuestionsEASA ATPL Question Bank67% (3)
- TB3 - 117 Engine Maintenance Manual: (EMM Book1 TOC) (Chapter 72 TOC)Documento84 pagineTB3 - 117 Engine Maintenance Manual: (EMM Book1 TOC) (Chapter 72 TOC)blackhawkNessuna valutazione finora
- Rotor Blade Static Balancing - Art or ScienceDocumento16 pagineRotor Blade Static Balancing - Art or ScienceT/ROX100% (1)
- Vintage Airplane - Dec 1996Documento36 pagineVintage Airplane - Dec 1996Aviation/Space History LibraryNessuna valutazione finora
- TB3 - 117 Engine Maintenance Manual: (EMM Book1 TOC) (Chapter 72 TOC)Documento11 pagineTB3 - 117 Engine Maintenance Manual: (EMM Book1 TOC) (Chapter 72 TOC)robiny100% (1)
- Aircraft Fluid SystemDocumento8 pagineAircraft Fluid SystemJJNessuna valutazione finora
- 01-Air Regulations - RK BaliDocumento1 pagina01-Air Regulations - RK BaliRanjan43% (7)
- Ch3 Balancing of Rigid - Flexible - Linked PDFDocumento119 pagineCh3 Balancing of Rigid - Flexible - Linked PDFAlexis CordovaNessuna valutazione finora
- TB3 - 117 Engine Maintenance Manual: (EMM Book1 TOC) (Chapter 72 TOC)Documento27 pagineTB3 - 117 Engine Maintenance Manual: (EMM Book1 TOC) (Chapter 72 TOC)robiny100% (1)
- 1st BalancingDocumento44 pagine1st BalancingOmkarNessuna valutazione finora
- Aircraft Gas Turbine Engine Vibration DiagnosticDocumento5 pagineAircraft Gas Turbine Engine Vibration DiagnosticfazzlieNessuna valutazione finora
- D350 607 3 RevFDocumento25 pagineD350 607 3 RevFBruno Alonso PachecoNessuna valutazione finora
- CFM56-7B Fan Blade Lubrication CESM-005Documento2 pagineCFM56-7B Fan Blade Lubrication CESM-005Keith Humphrey0% (2)
- Steadycontrol® Rotor: New Technology For Rotor Track and Balance TuningDocumento13 pagineSteadycontrol® Rotor: New Technology For Rotor Track and Balance TuningrobinyNessuna valutazione finora
- Ipc Lf507 1fDocumento610 pagineIpc Lf507 1fHarunFatoni100% (3)
- Retaining WallDocumento13 pagineRetaining Wallrasikamal100% (1)
- SOP Ground Handling AASDocumento138 pagineSOP Ground Handling AASHerfando Maulana AlhafizhNessuna valutazione finora
- Thai Airways Polar Operations MeetingDocumento85 pagineThai Airways Polar Operations Meetingchhetribharat08100% (1)
- Wind Load Calculation As Per EN1991-1!4!2005 - Rev 01 (By JR)Documento2 pagineWind Load Calculation As Per EN1991-1!4!2005 - Rev 01 (By JR)RigonDEC100% (2)
- Failure Analysis in Engineering ApplicationsDa EverandFailure Analysis in Engineering ApplicationsValutazione: 1 su 5 stelle1/5 (1)
- Tracking and Dynamic Balancing of Rotor BladesDocumento6 pagineTracking and Dynamic Balancing of Rotor Bladesfitasmounir100% (1)
- TB3 - 117 Engine Maintenance Manual: (EMM Book1 TOC) (Chapter 72 TOC)Documento10 pagineTB3 - 117 Engine Maintenance Manual: (EMM Book1 TOC) (Chapter 72 TOC)robinyNessuna valutazione finora
- TurbineDocumento8 pagineTurbineJay Patel100% (1)
- Sesi-14 Analisis Getaran Electric Motor & TugasDocumento10 pagineSesi-14 Analisis Getaran Electric Motor & Tugasyusup delopNessuna valutazione finora
- Lynn1970尾桨设计 结构Documento15 pagineLynn1970尾桨设计 结构邓帅Nessuna valutazione finora
- Analysis of Uncertainties in Measurement of Rotor Blade Tip Clearance in Gas Turbine Engine Under Dynamic ConditionDocumento19 pagineAnalysis of Uncertainties in Measurement of Rotor Blade Tip Clearance in Gas Turbine Engine Under Dynamic ConditionJOSEPH TinderNessuna valutazione finora
- Evaluation of Vibration Characterstics of A Compressor BladeDocumento47 pagineEvaluation of Vibration Characterstics of A Compressor BladeJ PrabuNessuna valutazione finora
- Turbo Charger Noise - Development of A Methodology For The Acoustic Turbo Charger LayoutDocumento7 pagineTurbo Charger Noise - Development of A Methodology For The Acoustic Turbo Charger Layoutd3xterNessuna valutazione finora
- AvcDocumento18 pagineAvcgulshanNessuna valutazione finora
- Articulo 3Documento14 pagineArticulo 3Angel RodriguezNessuna valutazione finora
- Vibration Analysis Recip Compressors PDFDocumento4 pagineVibration Analysis Recip Compressors PDFsandip singhNessuna valutazione finora
- Wind Turbine Gearbox Failure Modes - A Brief (Presentation) : ArticleDocumento27 pagineWind Turbine Gearbox Failure Modes - A Brief (Presentation) : ArticleFOOTBALL CRICKETNessuna valutazione finora
- Design of Dynamic Balancing Machine 7a83bad5Documento5 pagineDesign of Dynamic Balancing Machine 7a83bad5Wong Yong Jie100% (1)
- Vibrationanalysisof PeltonDocumento6 pagineVibrationanalysisof PeltonAditya DoyaleNessuna valutazione finora
- Bearing Damage Detection of The Induction Motors Using Current AnalysisDocumento6 pagineBearing Damage Detection of The Induction Motors Using Current AnalysisfaturNessuna valutazione finora
- Composite Structures: Ching-Chieh Lin, Ya-Jung Lee, Chu-Sung HungDocumento10 pagineComposite Structures: Ching-Chieh Lin, Ya-Jung Lee, Chu-Sung HunggemagdyNessuna valutazione finora
- Ahobal 2019 IOP Conf. Ser. Mater. Sci. Eng. 577 012140Documento11 pagineAhobal 2019 IOP Conf. Ser. Mater. Sci. Eng. 577 012140syed shabih ul hassanNessuna valutazione finora
- Ahobal 2019 IOP Conf. Ser. Mater. Sci. Eng. 577 012140Documento11 pagineAhobal 2019 IOP Conf. Ser. Mater. Sci. Eng. 577 012140syed shabih ul hassanNessuna valutazione finora
- Vibration of Overhung RotorsDocumento11 pagineVibration of Overhung RotorsAri HaranNessuna valutazione finora
- Mi 200224Documento8 pagineMi 200224Văn Tuấn NguyễnNessuna valutazione finora
- Process For Turboshaft Engine Performance TrendingDocumento6 pagineProcess For Turboshaft Engine Performance TrendingEric BechhoeferNessuna valutazione finora
- Perfil BladeDocumento22 paginePerfil BladeLeonardo FrühholzNessuna valutazione finora
- Rolling Element Bearings Vibration AnalysisDocumento10 pagineRolling Element Bearings Vibration Analysisi.kamalNessuna valutazione finora
- Reduction of Engine Exhaust Noise in A Jet Engine Test CellDocumento9 pagineReduction of Engine Exhaust Noise in A Jet Engine Test CellMASOUDNessuna valutazione finora
- Aerodynamic Characteristics of Rigid Coaxial Rotor by Wind Tunnel Test and Numerical CalculationDocumento9 pagineAerodynamic Characteristics of Rigid Coaxial Rotor by Wind Tunnel Test and Numerical CalculationAngel RodriguezNessuna valutazione finora
- Ball Bearing Enveloppe19745Documento13 pagineBall Bearing Enveloppe19745Eric21Nessuna valutazione finora
- Ch3 Balancing of Rigid - Flexible - Linked PDFDocumento119 pagineCh3 Balancing of Rigid - Flexible - Linked PDFCHANDRA MANI GUPTANessuna valutazione finora
- Rolling Element Bearing Analysis PDFDocumento8 pagineRolling Element Bearing Analysis PDFLong NguyenNessuna valutazione finora
- Bearing Fault Detection in Induction Motor Using Fast Fourier TransformDocumento5 pagineBearing Fault Detection in Induction Motor Using Fast Fourier Transformfahim47Nessuna valutazione finora
- Modal Analysis of Intermediate Shaft Used in Automobile Gear BoxDocumento5 pagineModal Analysis of Intermediate Shaft Used in Automobile Gear BoxJaswanth konkepudiNessuna valutazione finora
- Paper 4Documento24 paginePaper 4Daniel TangkauNessuna valutazione finora
- Electromagnetic Effects On The Torsional Natural Frequencies of An Induction Motor Driving A Reciprocating CompressorDocumento22 pagineElectromagnetic Effects On The Torsional Natural Frequencies of An Induction Motor Driving A Reciprocating CompressorRadu BabauNessuna valutazione finora
- Mechanical Systems and Signal Processing: Tejas H. Patel, Ashish K. DarpeDocumento17 pagineMechanical Systems and Signal Processing: Tejas H. Patel, Ashish K. DarpeAmirmohamad AzimiNessuna valutazione finora
- Application of Sweep To Improve The Efficiency of A Transonic FanDocumento14 pagineApplication of Sweep To Improve The Efficiency of A Transonic FanLuis C. Sosa ManzoNessuna valutazione finora
- Significance of Vibration Diagnosis of Rotating Machines During Commissioning: Few Case StudiesDocumento15 pagineSignificance of Vibration Diagnosis of Rotating Machines During Commissioning: Few Case StudiesosamaelnahrawyNessuna valutazione finora
- Multistage Aspects and Unsteady Effects of StatorDocumento13 pagineMultistage Aspects and Unsteady Effects of Statorkanbur.191Nessuna valutazione finora
- Health Monitoring For Spacecraft Reaction WheelsDocumento7 pagineHealth Monitoring For Spacecraft Reaction WheelskippcamNessuna valutazione finora
- Campbell - Effect of Voltage Unbalance On Motor VibrationDocumento7 pagineCampbell - Effect of Voltage Unbalance On Motor VibrationName24122021Nessuna valutazione finora
- Development and Design MetholodogyDocumento6 pagineDevelopment and Design MetholodogynopNessuna valutazione finora
- Defect Source Location of A Natural Defect On The High Speed Rolling Element Bearing With Acoustic EmissionDocumento7 pagineDefect Source Location of A Natural Defect On The High Speed Rolling Element Bearing With Acoustic EmissionHanifNessuna valutazione finora
- Vibrational Analysis of Flexible Coupling by Considering UnbalanceDocumento11 pagineVibrational Analysis of Flexible Coupling by Considering UnbalanceMuhammad TabishNessuna valutazione finora
- Study On The Instrument Panel Assembly Modal Analysis Basic On CAE TechnologyDocumento6 pagineStudy On The Instrument Panel Assembly Modal Analysis Basic On CAE Technologyaegix14Nessuna valutazione finora
- Manager - Advanced Quality Control Engineering Large Motor and Generator Department General Electric Company Schenectady, New YorkDocumento8 pagineManager - Advanced Quality Control Engineering Large Motor and Generator Department General Electric Company Schenectady, New YorkJay PatelNessuna valutazione finora
- Correlation Analysis of Multiple Sensors For Industrial Gas Turbine Compressor Blade Health MonitoringDocumento12 pagineCorrelation Analysis of Multiple Sensors For Industrial Gas Turbine Compressor Blade Health Monitoringpartha6789Nessuna valutazione finora
- Bently Nevada Wind Renewables Adapt Brochure 2018Documento8 pagineBently Nevada Wind Renewables Adapt Brochure 2018zeroseyaNessuna valutazione finora
- V07bt35a020 gt2017 64108Documento12 pagineV07bt35a020 gt2017 64108SmileNessuna valutazione finora
- Machinery Vibration Limits and Dynamic Structural ResponseDocumento28 pagineMachinery Vibration Limits and Dynamic Structural ResponseteguhfujyardiNessuna valutazione finora
- Vibrations of Power Plant Machines: A Guide for Recognition of Problems and TroubleshootingDa EverandVibrations of Power Plant Machines: A Guide for Recognition of Problems and TroubleshootingNessuna valutazione finora
- Module 01-01 Mathematics: ArithmeticDocumento139 pagineModule 01-01 Mathematics: ArithmeticrobinyNessuna valutazione finora
- 7290engine Oil and Breather SystemDocumento27 pagine7290engine Oil and Breather SystemrobinyNessuna valutazione finora
- M o D U L e 0 1 - 0 3 A Mathematics - Geometry: Simple Geometrical ConstructionsDocumento43 pagineM o D U L e 0 1 - 0 3 A Mathematics - Geometry: Simple Geometrical ConstructionsrobinyNessuna valutazione finora
- PART-66 Syllabuses: Module 1. MathematicsDocumento2 paginePART-66 Syllabuses: Module 1. MathematicsrobinyNessuna valutazione finora
- TB3 - 117 Engine Maintenance Manual: (EMM Book1 TOC) (Chapter 72 TOC)Documento13 pagineTB3 - 117 Engine Maintenance Manual: (EMM Book1 TOC) (Chapter 72 TOC)robinyNessuna valutazione finora
- Addinex 1Documento5 pagineAddinex 1robinyNessuna valutazione finora
- TB3 - 117 Engine Maintenance Manual: (EMM Book1 TOC) (Chapter 72 TOC)Documento20 pagineTB3 - 117 Engine Maintenance Manual: (EMM Book1 TOC) (Chapter 72 TOC)robinyNessuna valutazione finora
- TB3 - 117 Engine Maintenance Manual: (EMM Book1 TOC) (Chapter 72 TOC)Documento3 pagineTB3 - 117 Engine Maintenance Manual: (EMM Book1 TOC) (Chapter 72 TOC)robinyNessuna valutazione finora
- AppendixDocumento19 pagineAppendixrobinyNessuna valutazione finora
- TB3 - 117 Engine Maintenance Manual: (EMM Book1 TOC) (Chapter 72 TOC)Documento23 pagineTB3 - 117 Engine Maintenance Manual: (EMM Book1 TOC) (Chapter 72 TOC)robinyNessuna valutazione finora
- Appendix 4Documento5 pagineAppendix 4robinyNessuna valutazione finora
- Appendix 5 Peculiarities of Engine Transportation, Storage, Unpacking and Packing in Metal Shipping Container Manufactured by Klimov JSCDocumento3 pagineAppendix 5 Peculiarities of Engine Transportation, Storage, Unpacking and Packing in Metal Shipping Container Manufactured by Klimov JSCrobinyNessuna valutazione finora
- TB3-117 Maintenance Manual: The Shelf Life of The Prepared Siloxane Enamel Is Five Days. 2. Antistick AgentDocumento2 pagineTB3-117 Maintenance Manual: The Shelf Life of The Prepared Siloxane Enamel Is Five Days. 2. Antistick AgentrobinyNessuna valutazione finora
- State Standard,: Specification, InstmctionDocumento2 pagineState Standard,: Specification, Instmctionrobiny100% (1)
- TB3 - 117 Engine Maintenance Manual: (EMM Book1 TOC) (Chapter 72 TOC)Documento14 pagineTB3 - 117 Engine Maintenance Manual: (EMM Book1 TOC) (Chapter 72 TOC)robinyNessuna valutazione finora
- Srmgsa PDFDocumento121 pagineSrmgsa PDFrobinyNessuna valutazione finora
- TM 1 1500 250 23Documento79 pagineTM 1 1500 250 23robinyNessuna valutazione finora
- Section 5. Welding and BrazingDocumento27 pagineSection 5. Welding and BrazingrobinyNessuna valutazione finora
- 01descrjption and OperationDocumento15 pagine01descrjption and OperationblackhawkNessuna valutazione finora
- Section 6. Welding and Brazing SafetyDocumento2 pagineSection 6. Welding and Brazing SafetyrobinyNessuna valutazione finora
- An MV2 B47Documento6 pagineAn MV2 B47robinyNessuna valutazione finora
- TM 1-1500-323-24-3Documento388 pagineTM 1-1500-323-24-3"Rufus"Nessuna valutazione finora
- User Manual SteadyControlDocumento57 pagineUser Manual SteadyControlrobiny100% (2)
- Chapter 4. Metal Structure, Welding, and BrazingDocumento2 pagineChapter 4. Metal Structure, Welding, and BrazingrobinyNessuna valutazione finora
- Electromagnetic Interference Causes Effects & MitigationDocumento12 pagineElectromagnetic Interference Causes Effects & MitigationsbpathiNessuna valutazione finora
- Routefinder: Online Flight PlannerDocumento2 pagineRoutefinder: Online Flight PlannerRAdE0nEXENessuna valutazione finora
- CHAPTER ProblemsDocumento3 pagineCHAPTER ProblemsOmarWaelNessuna valutazione finora
- 2019 - 01 - 27 - General Navigation Feedback 21 Jan 2019Documento2 pagine2019 - 01 - 27 - General Navigation Feedback 21 Jan 2019cscNessuna valutazione finora
- Principle of Carburetion - 3Documento2 paginePrinciple of Carburetion - 3vijayakumarNessuna valutazione finora
- Aircraft NavigationDocumento11 pagineAircraft Navigationpinpit282Nessuna valutazione finora
- Angular Projectile MotionDocumento16 pagineAngular Projectile MotionwscienceNessuna valutazione finora
- EOC Exercise 1Documento11 pagineEOC Exercise 1Lukhman Al AmeenNessuna valutazione finora
- Boeing - IIT National Aeromodelling Competition 2016-2017Documento12 pagineBoeing - IIT National Aeromodelling Competition 2016-2017csmistryNessuna valutazione finora
- Chapter I: B777: Aircraft Handling ManualDocumento12 pagineChapter I: B777: Aircraft Handling Manualapi-3705891100% (3)
- UTTTDocumento30 pagineUTTTigorazamov7777Nessuna valutazione finora
- Low Cost Automation Tutorial - Technical Tutorial.Documento1 paginaLow Cost Automation Tutorial - Technical Tutorial.manbkkNessuna valutazione finora
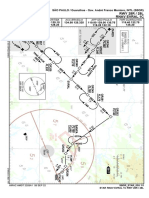
- SBGR - Rnav Evral 1c Rwy 28r 28l - Star - 20220908Documento1 paginaSBGR - Rnav Evral 1c Rwy 28r 28l - Star - 20220908JuliaNessuna valutazione finora
- Collection2012 2013Documento175 pagineCollection2012 2013Alma Raluca MihuNessuna valutazione finora
- Indigo Airlines Assignment Group 1Documento4 pagineIndigo Airlines Assignment Group 1Prudhvi ChowdaryNessuna valutazione finora
- Wing LoadingDocumento17 pagineWing LoadingMouni's SreeNessuna valutazione finora