Potrebbero piacerti anche
- 26.parallel RLCDocumento17 pagine26.parallel RLCIbrahim GhunaimNessuna valutazione finora
- Gas EquationsDocumento5 pagineGas Equationsmohammed.2000.01.09Nessuna valutazione finora
- Openfoam Case Study: Flat Plate ResistanceDocumento22 pagineOpenfoam Case Study: Flat Plate ResistancejasonhaungNessuna valutazione finora
- i2HjTU Lecture3 PDFDocumento13 paginei2HjTU Lecture3 PDFAbdulahi AbebeNessuna valutazione finora
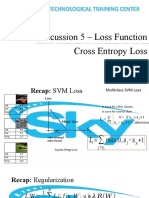
- Discussion 5 - Cross Entropy Loss - AnnotatedDocumento10 pagineDiscussion 5 - Cross Entropy Loss - AnnotatedThinkers InstituteNessuna valutazione finora
- Mini-Project: Team WorkDocumento10 pagineMini-Project: Team WorkAmr TarekNessuna valutazione finora
- Answers Lesson 6Documento2 pagineAnswers Lesson 6Octav PaloaieNessuna valutazione finora
- Math3 Lecture03Documento11 pagineMath3 Lecture03Munif MubtasimNessuna valutazione finora
- Math 1Documento86 pagineMath 1Naji ZaidNessuna valutazione finora
- Solucion A Ejercicios PropuestosDocumento8 pagineSolucion A Ejercicios PropuestosANDRES REINOSONessuna valutazione finora
- MTH501 Mid SPS2006Documento4 pagineMTH501 Mid SPS2006naseem hameedNessuna valutazione finora
- Figura Área (MM 2) Figura Área (MM 2)Documento3 pagineFigura Área (MM 2) Figura Área (MM 2)Adrián Córdoba SarmientoNessuna valutazione finora
- Logarithmic FunctionsDocumento2 pagineLogarithmic FunctionsSerge DemirdjianNessuna valutazione finora
- Week1 LimitsDocumento19 pagineWeek1 Limitsalexgabrielleeco23Nessuna valutazione finora
- HW 5 SolDocumento10 pagineHW 5 SolPedroNessuna valutazione finora
- CHE145 Gomez, TerradoDocumento42 pagineCHE145 Gomez, TerradoRicky JayNessuna valutazione finora
- Heli PatDocumento7 pagineHeli PatPatrick Wendell CaballeroNessuna valutazione finora
- 4 14-4 15Documento3 pagine4 14-4 15Mustafa Al-GhoulNessuna valutazione finora
- Tutorial Pole Placement SolDocumento11 pagineTutorial Pole Placement SolDark ShadyNessuna valutazione finora
- MEC503 Lecture4Documento9 pagineMEC503 Lecture4مصطفى عبدالله عبدالرحمن اغاNessuna valutazione finora
- Esci 110 - n046 - Module 8 PostestDocumento5 pagineEsci 110 - n046 - Module 8 PostestIvy PerezNessuna valutazione finora
- 0 VariantDocumento1 pagina0 VariantkinofrostNessuna valutazione finora
- Assignment 1 MAT323 (22301787)Documento5 pagineAssignment 1 MAT323 (22301787)Ahnaf ShahriarNessuna valutazione finora
- الواجب الأولDocumento5 pagineالواجب الأولnawafNessuna valutazione finora
- 10 16 2020 - Linear Programming 2Documento17 pagine10 16 2020 - Linear Programming 2TheoNessuna valutazione finora
- QuadEquations PPT Alg2Documento25 pagineQuadEquations PPT Alg2Joyce JuarezNessuna valutazione finora
- Dapan BT3 CSTD HK212Documento15 pagineDapan BT3 CSTD HK212Phúc Thành LạiNessuna valutazione finora
- ME 163 Using Mathematica To Construct Phase Plane PlotsDocumento31 pagineME 163 Using Mathematica To Construct Phase Plane PlotsMohamed ElfekyNessuna valutazione finora
- Problem Laplace TransformDocumento8 pagineProblem Laplace Transform22142107Nessuna valutazione finora
- Unit 1.4Documento21 pagineUnit 1.4Ayanda CebekhuluNessuna valutazione finora
- Secondary Consolidation Settlement Part 2 - AGUILOR (PPT Used)Documento16 pagineSecondary Consolidation Settlement Part 2 - AGUILOR (PPT Used)Kyohai RinggoNessuna valutazione finora
- EEF 467 Exam 2020Documento7 pagineEEF 467 Exam 2020Nguh DanielNessuna valutazione finora
- Econ107 Assignment 1 Answer Key: Question 1 (50 Marks)Documento4 pagineEcon107 Assignment 1 Answer Key: Question 1 (50 Marks)Ives LeeNessuna valutazione finora
- Function Part 2Documento40 pagineFunction Part 2Muhd HafidzNessuna valutazione finora
- Machine Design 1st Partial Equation SheetDocumento2 pagineMachine Design 1st Partial Equation SheetRoberto Adrian Martinez ValverdeNessuna valutazione finora
- Pre-Calculus: Circular Function and Their GraphsDocumento7 paginePre-Calculus: Circular Function and Their GraphsMaryAnnNevadoNessuna valutazione finora
- ZRLocus For AnalysisDocumento44 pagineZRLocus For AnalysisYusufANessuna valutazione finora
- Tutorial - 5 - Solution - q1 q2 q3 q4 q5Documento5 pagineTutorial - 5 - Solution - q1 q2 q3 q4 q5KireziNessuna valutazione finora
- Today:: + Cos + Sin ,:, Arg Arg + Arg +Documento20 pagineToday:: + Cos + Sin ,:, Arg Arg + Arg +IbrahimNessuna valutazione finora
- By Dr. Paragmoni Kalita Department of Mechanical Engineering Tezpur UniversityDocumento10 pagineBy Dr. Paragmoni Kalita Department of Mechanical Engineering Tezpur UniversityR HNessuna valutazione finora
- Tugas TRK Ii CH 11Documento10 pagineTugas TRK Ii CH 11Samuel Bagas Wahyu Santoso100% (2)
- LaplaceDocumento42 pagineLaplaceAseel OtoumNessuna valutazione finora
- Name: - 2K14-EE - Section - Due Date: - Submission DateDocumento2 pagineName: - 2K14-EE - Section - Due Date: - Submission DateMuhammadMansoorGoharNessuna valutazione finora
- Summary of Chapter 6Documento9 pagineSummary of Chapter 6Abdalluh MohammedNessuna valutazione finora
- Lecture # 5 (Complex Numbers)Documento25 pagineLecture # 5 (Complex Numbers)ahmad5557222Nessuna valutazione finora
- EEE354 Assignment Answer SchemeDocumento7 pagineEEE354 Assignment Answer SchemeIzzat AzmanNessuna valutazione finora
- 3 - 1 Laplace TransformDocumento23 pagine3 - 1 Laplace TransformShilpya Kurniasih100% (1)
- EE380 211 Major2 SolvedDocumento20 pagineEE380 211 Major2 SolvedAmmar AlmobyiedNessuna valutazione finora
- Ejemplo 1 Arco No CircularDocumento5 pagineEjemplo 1 Arco No CircularAbigail Cortez MamaniNessuna valutazione finora
- The Z TransformDocumento23 pagineThe Z TransformIzzat AzmanNessuna valutazione finora
- 3.3 - Integral DefinidaDocumento12 pagine3.3 - Integral Definidajairo daniel mendoza torresNessuna valutazione finora
- ANS. MidtermDocumento17 pagineANS. MidtermMohamed rabeaaNessuna valutazione finora
- Lesson 4 - Limit LawsDocumento12 pagineLesson 4 - Limit LawsKirstian MartinezNessuna valutazione finora
- Mathematics-Basic (241) Marking Scheme SQP-2020-21 Max. Marks: 80 Duration:3HrsDocumento16 pagineMathematics-Basic (241) Marking Scheme SQP-2020-21 Max. Marks: 80 Duration:3Hrsmadhav haibateNessuna valutazione finora
- 6 SlidesDocumento19 pagine6 Slidesxiaxiner8Nessuna valutazione finora
- Lesson 11 - Laplace Transform and Its ApplicationsDocumento36 pagineLesson 11 - Laplace Transform and Its ApplicationsSalman RezaNessuna valutazione finora
- Instructor's Manual to Accompany CALCULUS WITH ANALYTIC GEOMETRYDa EverandInstructor's Manual to Accompany CALCULUS WITH ANALYTIC GEOMETRYNessuna valutazione finora
- A Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Da EverandA Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Valutazione: 2.5 su 5 stelle2.5/5 (2)
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesDa EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesValutazione: 1.5 su 5 stelle1.5/5 (2)
- IEEE 24748-5 - 2017 - SW Development PlanningDocumento48 pagineIEEE 24748-5 - 2017 - SW Development Planningangel tomas guerrero de la rubiaNessuna valutazione finora
- Kodak DirectView CR-825,850 - Diagrams PDFDocumento12 pagineKodak DirectView CR-825,850 - Diagrams PDFAgustín CarranzaNessuna valutazione finora
- Inv1597368271 2Documento3 pagineInv1597368271 2Ibrahim El AminNessuna valutazione finora
- Goldenboy PDFDocumento3 pagineGoldenboy PDFFeroz KabirNessuna valutazione finora
- Thomson THG540Documento36 pagineThomson THG540Tibi SloviNessuna valutazione finora
- Introduction To Spring Framework (Presentation - 143 Slides)Documento143 pagineIntroduction To Spring Framework (Presentation - 143 Slides)ammayi100100% (1)
- Exercise - 01: Check Your GraspDocumento3 pagineExercise - 01: Check Your GraspAnkit Singh YadavNessuna valutazione finora
- CTRLX Automation - BrochureDocumento57 pagineCTRLX Automation - BrochureEwerton BalarezNessuna valutazione finora
- OptiX OSN 1800 Brochure PDFDocumento4 pagineOptiX OSN 1800 Brochure PDFThi KháchNessuna valutazione finora
- Fortune - Tafadzwa - Madzivo - Infrastructure & Cyber Security OfficerDocumento4 pagineFortune - Tafadzwa - Madzivo - Infrastructure & Cyber Security OfficerFortune Tafadzwa MadzivoNessuna valutazione finora
- TQM Clause 45Documento4 pagineTQM Clause 45MychaWongNessuna valutazione finora
- DHTML EventsDocumento14 pagineDHTML EventsRitesh Kumar 75Nessuna valutazione finora
- GoogleDocumento3 pagineGoogleAKSHAY KHAMARNessuna valutazione finora
- Wansview IP Camera ManualDocumento54 pagineWansview IP Camera ManualMaria Jose PareaNessuna valutazione finora
- ScanSoft OmniPage SE 4.0Documento1 paginaScanSoft OmniPage SE 4.0hadzilNessuna valutazione finora
- François Roche - R&Sie (N) ArchitectsDocumento14 pagineFrançois Roche - R&Sie (N) ArchitectsEmersonAagaardNessuna valutazione finora
- OscillatorsDocumento14 pagineOscillatorsSoundararajan RajagopalanNessuna valutazione finora
- Glucose LevelDocumento6 pagineGlucose LevelHakan SayilganNessuna valutazione finora
- Electronic Control System ComponentsDocumento7 pagineElectronic Control System ComponentsTri WahyuningsihNessuna valutazione finora
- PROJECTDocumento34 paginePROJECTBiswajit PaulNessuna valutazione finora
- InstallDocumento1 paginaInstallTude HamsyongNessuna valutazione finora
- Summary Report-ETABSDocumento54 pagineSummary Report-ETABSPMS SabarmatiNessuna valutazione finora
- Clicking Clean 2017Documento102 pagineClicking Clean 2017dreams24Nessuna valutazione finora
- Composite and Inverse FunDocumento14 pagineComposite and Inverse FunNiejay Arcullo LlagasNessuna valutazione finora
- Design Guidelines Cheat SheetDocumento2 pagineDesign Guidelines Cheat SheetClaudio Lema FerrufinoNessuna valutazione finora
- Group 2 - Integrated Planning Course On IcsDocumento1 paginaGroup 2 - Integrated Planning Course On IcsJared LibiranNessuna valutazione finora
- Demski2016 Open Data Models For Smart Health Interconnected Applications The Example of OpenEHRDocumento9 pagineDemski2016 Open Data Models For Smart Health Interconnected Applications The Example of OpenEHRCristina CazacuNessuna valutazione finora
- Guidelines On Assessing DSP Security and OES Compliance With The NISD Security RequirementsDocumento59 pagineGuidelines On Assessing DSP Security and OES Compliance With The NISD Security RequirementsIvor ŠebaljNessuna valutazione finora
- CDM Series Det SVC ManDocumento109 pagineCDM Series Det SVC ManRaulJoseOleagaFloresNessuna valutazione finora
- 1581 Service Manual 314982-01 (1987 Jun) PDFDocumento22 pagine1581 Service Manual 314982-01 (1987 Jun) PDFNatasyaNessuna valutazione finora