Potrebbero piacerti anche
- (CTRL) The Finders' Keeper: An Interview With Marion PettieDocumento10 pagine(CTRL) The Finders' Keeper: An Interview With Marion PettieSolomanTrismosin100% (2)
- Caisley, Robert - KissingDocumento53 pagineCaisley, Robert - KissingColleen BrutonNessuna valutazione finora
- Manual4241 SciLabDocumento3 pagineManual4241 SciLabevandame5739Nessuna valutazione finora
- Elementary Linear Algebra Applications Version 11th Edition Anton Solutions ManualDocumento36 pagineElementary Linear Algebra Applications Version 11th Edition Anton Solutions Manualpearltucker71uej95% (22)
- Canadian Tire Corp. - Supply Chain Best PracticesDocumento7 pagineCanadian Tire Corp. - Supply Chain Best PracticesAnonymous WkbmWCa8MNessuna valutazione finora
- Risk AssessmentDocumento38 pagineRisk AssessmentYasar arafat SHNessuna valutazione finora
- Vacuum Column DesignDocumento6 pagineVacuum Column DesignAtul ChoudhariNessuna valutazione finora
- Performance of Axial Compressor StagesDocumento11 paginePerformance of Axial Compressor StagesBiswajit JenaNessuna valutazione finora
- Software Quality Metrics MethodologyDocumento17 pagineSoftware Quality Metrics MethodologySumit RajputNessuna valutazione finora
- Model Free ObserverDocumento8 pagineModel Free Observer程崇律Nessuna valutazione finora
- Theoretical and Experimental Investigation of Kwu'S Most Recent HP//P Steam Turbine BladeDocumento9 pagineTheoretical and Experimental Investigation of Kwu'S Most Recent HP//P Steam Turbine BladedrcNessuna valutazione finora
- Huba 2010Documento8 pagineHuba 2010Aleksandar MicicNessuna valutazione finora
- Scaling and Bandwidth-Parameterization Based Controller TuningDocumento8 pagineScaling and Bandwidth-Parameterization Based Controller Tuninghamza mesaiNessuna valutazione finora
- Design and Analysis of Closed Loop Capacity Control For A Multi 2005 CIRP AnDocumento4 pagineDesign and Analysis of Closed Loop Capacity Control For A Multi 2005 CIRP AnMaría Paula SánchezNessuna valutazione finora
- Turbocharger Turbine Aerodynamic Optimization For Reduced Fuel Consumption and CO2 Emissions From Heavy-Duty Diesel Engines: Experimental Validation and Flow Field AnalysisDocumento16 pagineTurbocharger Turbine Aerodynamic Optimization For Reduced Fuel Consumption and CO2 Emissions From Heavy-Duty Diesel Engines: Experimental Validation and Flow Field AnalysiscostallNessuna valutazione finora
- Method For Calculating The Application Factor KA IDocumento8 pagineMethod For Calculating The Application Factor KA IKailas KatharNessuna valutazione finora
- Zhang 2017Documento6 pagineZhang 2017Metal ArtNessuna valutazione finora
- Assignment 3Documento1 paginaAssignment 3Aayush ShrivastavaNessuna valutazione finora
- Paper1ga FinalDocumento5 paginePaper1ga FinalJismNessuna valutazione finora
- KHN Biquad Using OtaDocumento4 pagineKHN Biquad Using OtaApoorva NeelabhNessuna valutazione finora
- Exact Tuning of PID ControllersDocumento6 pagineExact Tuning of PID Controllersmazaher karamiNessuna valutazione finora
- 1577066Documento20 pagine1577066hazem saadNessuna valutazione finora
- Once, 6: Inotor A-Connected, 6Documento8 pagineOnce, 6: Inotor A-Connected, 6Amit sahaNessuna valutazione finora
- Advanced Proportional-Integral-Derivative Tuning For Integrating and Unstable Processes With Gain and Phase Margin SpecificationsDocumento5 pagineAdvanced Proportional-Integral-Derivative Tuning For Integrating and Unstable Processes With Gain and Phase Margin SpecificationsSidhant SharanNessuna valutazione finora
- Turbofan Exhaust Gas Temperature Forecasting and Performance Monitoring With A Neural Network ModelDocumento9 pagineTurbofan Exhaust Gas Temperature Forecasting and Performance Monitoring With A Neural Network ModelVinh BùiNessuna valutazione finora
- An Examination of Engine Effects On HelicopterDocumento10 pagineAn Examination of Engine Effects On HelicoptershyjusnairNessuna valutazione finora
- Mohla 2020Documento14 pagineMohla 2020david.darmaji009Nessuna valutazione finora
- Controladores PidDocumento6 pagineControladores PidIvan Camilo Suarez FigueroaNessuna valutazione finora
- Design and Verification of Digital SystemsDocumento28 pagineDesign and Verification of Digital SystemsKha NguyễnNessuna valutazione finora
- 1 s2.0 S0029801823006923 MainDocumento17 pagine1 s2.0 S0029801823006923 MainSHIVAM KUMAR CHOUDHARYNessuna valutazione finora
- Light Helicopter CalculationDocumento9 pagineLight Helicopter Calculationshayant nandiNessuna valutazione finora
- Comparison of An Acoustically Optimized and An Aerodynamically Optimized Exit Guide VaneDocumento13 pagineComparison of An Acoustically Optimized and An Aerodynamically Optimized Exit Guide VaneHABINSHUTI FERDINANDNessuna valutazione finora
- Optimization Phase-Locked Loop Circuits Via Geometric ProgrammingDocumento4 pagineOptimization Phase-Locked Loop Circuits Via Geometric ProgrammingAlex WongNessuna valutazione finora
- Reviving Erroneous Stability-Based Clock-Gating Using Partial Max-SATDocumento6 pagineReviving Erroneous Stability-Based Clock-Gating Using Partial Max-SATkbrinaldiNessuna valutazione finora
- Phase Lag Compensator Design Using Bode Plots - Comp - Freq - LagDocumento14 paginePhase Lag Compensator Design Using Bode Plots - Comp - Freq - LagBrian LevineNessuna valutazione finora
- Jt9D Individual Engine Performance Modelling: Sakhr Abu Darag and Tomas GronstedtDocumento7 pagineJt9D Individual Engine Performance Modelling: Sakhr Abu Darag and Tomas GronstedtdausNessuna valutazione finora
- Ese559 Jul2022 FinalDocumento10 pagineEse559 Jul2022 FinalAmirul HazzmiNessuna valutazione finora
- SEAD AC Webinar Slide Deck 131126Documento44 pagineSEAD AC Webinar Slide Deck 131126manchuricoNessuna valutazione finora
- Vilanova - Pid Tuning For Cascade Control System DesignDocumento4 pagineVilanova - Pid Tuning For Cascade Control System DesignCarlos BellatinNessuna valutazione finora
- RTDA Final R PDFDocumento33 pagineRTDA Final R PDFMourougapragash SubramanianNessuna valutazione finora
- PID Tuning With Exact Gain and Phase Margins: Qing-Guo Wang, Ho-Wang Fung, Yu ZhangDocumento7 paginePID Tuning With Exact Gain and Phase Margins: Qing-Guo Wang, Ho-Wang Fung, Yu ZhangAnonymous WkbmWCa8MNessuna valutazione finora
- Unesco - Eolss Sample Chapters: Controller Design in Time-DomainDocumento9 pagineUnesco - Eolss Sample Chapters: Controller Design in Time-DomainAnonymous EPSHB9tXZNessuna valutazione finora
- Pointwise Linear Quadratic Optimal Control of A Tandem Cold RollDocumento8 paginePointwise Linear Quadratic Optimal Control of A Tandem Cold RollSaif Assistant EngineerNessuna valutazione finora
- 1999 IFAC 14th Triennial World Congn.:ss, Beijing. China: Elare Oyj, P.O.BoxDocumento6 pagine1999 IFAC 14th Triennial World Congn.:ss, Beijing. China: Elare Oyj, P.O.BoxJessica RossNessuna valutazione finora
- Simple Technique For Root Locus PlottingDocumento9 pagineSimple Technique For Root Locus PlottingHernández VaNessuna valutazione finora
- Maity - Patra - 2016 - Tradeoffs Aware Design Procedure For An Adaptively Biased Capacitorless LowDocumento12 pagineMaity - Patra - 2016 - Tradeoffs Aware Design Procedure For An Adaptively Biased Capacitorless Low马晓飞Nessuna valutazione finora
- Process Capability Indices For Quality AssuranceDocumento22 pagineProcess Capability Indices For Quality AssuranceYo GoldNessuna valutazione finora
- Performance Analysis of Speed Control of DC Motor Using P Pi PD and Pid Controllers IJERTV2IS50098Documento7 paginePerformance Analysis of Speed Control of DC Motor Using P Pi PD and Pid Controllers IJERTV2IS50098Rohith YerrabachalaNessuna valutazione finora
- Skogestad PDFDocumento19 pagineSkogestad PDFRajendra100% (1)
- Development of Numerical Tools For Stator-Rotor Cavities Calculation in Heavy-Duty Gas TurbinesDocumento13 pagineDevelopment of Numerical Tools For Stator-Rotor Cavities Calculation in Heavy-Duty Gas TurbinesLuca BozziNessuna valutazione finora
- ADAPTATION FOR TANDEM COLD MILL MODELS - 2007 - IFAC Proceedings VolumesDocumento6 pagineADAPTATION FOR TANDEM COLD MILL MODELS - 2007 - IFAC Proceedings Volumessmeykel100% (1)
- Activity 9: Control System Design of DC Motor Position Control Using Lead MethodDocumento12 pagineActivity 9: Control System Design of DC Motor Position Control Using Lead MethodNathannaell ReibenNessuna valutazione finora
- Of COnference 2007 2007 OpenFOAM Conference NovemberDocumento11 pagineOf COnference 2007 2007 OpenFOAM Conference Novemberhamid_zoka6069Nessuna valutazione finora
- Tuning of PID Controllers With Fuzzy Logic: AbstractDocumento8 pagineTuning of PID Controllers With Fuzzy Logic: Abstractjames100% (1)
- EE214B: Folded CascodeDocumento11 pagineEE214B: Folded CascodeNeil Hildick-SmithNessuna valutazione finora
- Identification and Control of Blast Furnace Gas Top Pressure Recovery Turbine UnitDocumento5 pagineIdentification and Control of Blast Furnace Gas Top Pressure Recovery Turbine Unitsandip ghoshNessuna valutazione finora
- Optimal Tuning of PI Controller Using Swarm Intelligence For A Nonlinear ProcessDocumento10 pagineOptimal Tuning of PI Controller Using Swarm Intelligence For A Nonlinear ProcessAravind RamaswamyNessuna valutazione finora
- 2014 Reconfig TorqueDocumento6 pagine2014 Reconfig TorqueAnonymous AFFiZnNessuna valutazione finora
- CIGRE 2012: 21, Rue D'artois, F-75008 PARISDocumento9 pagineCIGRE 2012: 21, Rue D'artois, F-75008 PARISakash kumarNessuna valutazione finora
- IeeeDocumento7 pagineIeeesadouniNessuna valutazione finora
- Controller TuningDocumento7 pagineController TuningsaxenanikitaNessuna valutazione finora
- 1375620Documento6 pagine1375620revs_eeeNessuna valutazione finora
- 164 T494 PDFDocumento6 pagine164 T494 PDFSaksham PathrolNessuna valutazione finora
- Fpga Based Real Time Simulation For Electrical MachinesDocumento6 pagineFpga Based Real Time Simulation For Electrical MachinesshivguptaNessuna valutazione finora
- TutorialDocumento4 pagineTutorialAnonymous WkbmWCa8MNessuna valutazione finora
- Optimal PID-Control On First Order Plus Time Delay Systems & Verification of The SIMC RulesDocumento6 pagineOptimal PID-Control On First Order Plus Time Delay Systems & Verification of The SIMC RulesAnonymous WkbmWCa8MNessuna valutazione finora
- Elect: AFIT/GAE/ENY/9 ID-18Documento114 pagineElect: AFIT/GAE/ENY/9 ID-18Anonymous WkbmWCa8MNessuna valutazione finora
- Lec8h2 OptimalControl PDFDocumento83 pagineLec8h2 OptimalControl PDFAnonymous WkbmWCa8MNessuna valutazione finora
- Hu2013 PDFDocumento15 pagineHu2013 PDFAnonymous WkbmWCa8MNessuna valutazione finora
- Deadtime Modeling For First Order Plus Dead Time Process in A Process IndustryDocumento3 pagineDeadtime Modeling For First Order Plus Dead Time Process in A Process IndustryAnonymous WkbmWCa8MNessuna valutazione finora
- Ventili Kao Aktuatori: OS4UIP 2013Documento14 pagineVentili Kao Aktuatori: OS4UIP 2013Anonymous WkbmWCa8MNessuna valutazione finora
- ! Maximini2004Documento6 pagine! Maximini2004Anonymous WkbmWCa8MNessuna valutazione finora
- Nguyen 2011Documento11 pagineNguyen 2011Anonymous WkbmWCa8MNessuna valutazione finora
- Cu Rad AcaDocumento9 pagineCu Rad AcaAnonymous WkbmWCa8MNessuna valutazione finora
- PID Tuning With Exact Gain and Phase Margins: Qing-Guo Wang, Ho-Wang Fung, Yu ZhangDocumento7 paginePID Tuning With Exact Gain and Phase Margins: Qing-Guo Wang, Ho-Wang Fung, Yu ZhangAnonymous WkbmWCa8MNessuna valutazione finora
- Frequency Response Based PID Controller Design With Set Point FilterDocumento4 pagineFrequency Response Based PID Controller Design With Set Point FilterAnonymous WkbmWCa8MNessuna valutazione finora
- Three-Dimensional Visualization of Nichols, Hall, and Robust-Performance DiagramsDocumento6 pagineThree-Dimensional Visualization of Nichols, Hall, and Robust-Performance DiagramsAnonymous WkbmWCa8MNessuna valutazione finora
- English 7 Compare Contrast The People Could Fly Harriet TubmanDocumento3 pagineEnglish 7 Compare Contrast The People Could Fly Harriet Tubmanapi-508729334Nessuna valutazione finora
- DLL Template MathDocumento3 pagineDLL Template MathVash Mc GregorNessuna valutazione finora
- Sample File: A of TheDocumento6 pagineSample File: A of TheMegan KennedyNessuna valutazione finora
- Timothy Ajani, "Syntax and People: How Amos Tutuola's English Was Shaped by His People"Documento20 pagineTimothy Ajani, "Syntax and People: How Amos Tutuola's English Was Shaped by His People"PACNessuna valutazione finora
- Imam Zainul Abideen (RA) 'S Service To The Poor and DestituteDocumento3 pagineImam Zainul Abideen (RA) 'S Service To The Poor and DestituteShoyab11Nessuna valutazione finora
- Fault Detection of Gear Using Spectrum and CepstruDocumento6 pagineFault Detection of Gear Using Spectrum and Cepstruराकेश झाNessuna valutazione finora
- Consumer Trend Canvas (CTC) Template 2022Documento1 paginaConsumer Trend Canvas (CTC) Template 2022Patricia DominguezNessuna valutazione finora
- LITERATURE MATRIX PLAN LastimosaDocumento2 pagineLITERATURE MATRIX PLAN LastimosaJoebelle LastimosaNessuna valutazione finora
- TesisDocumento388 pagineTesisHadazaNessuna valutazione finora
- Lesson Plan 2 Revised - Morgan LegrandDocumento19 pagineLesson Plan 2 Revised - Morgan Legrandapi-540805523Nessuna valutazione finora
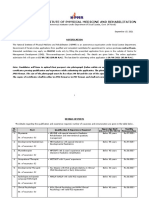
- NIPMR Notification v3Documento3 pagineNIPMR Notification v3maneeshaNessuna valutazione finora
- Character Skills Snapshot Sample ItemsDocumento2 pagineCharacter Skills Snapshot Sample ItemsCharlie BolnickNessuna valutazione finora
- BEM - Mandatory CoursesDocumento4 pagineBEM - Mandatory CoursesmohdrashdansaadNessuna valutazione finora
- Mus Culo SkeletalDocumento447 pagineMus Culo SkeletalKristine NicoleNessuna valutazione finora
- Đại Từ Quan Hệ Trong Tiếng AnhDocumento5 pagineĐại Từ Quan Hệ Trong Tiếng AnhNcTungNessuna valutazione finora
- Reading Listening 2Documento5 pagineReading Listening 2Lisbet GomezNessuna valutazione finora
- Pengaruh Kompetensi Spiritual Guru Pendidikan Agama Kristen Terhadap Pertumbuhan Iman SiswaDocumento13 paginePengaruh Kompetensi Spiritual Guru Pendidikan Agama Kristen Terhadap Pertumbuhan Iman SiswaK'lala GrianNessuna valutazione finora
- Adventures in Parenting RevDocumento67 pagineAdventures in Parenting Revmakj_828049Nessuna valutazione finora
- Gallery IsKCON Desire Tree PDF MudrasDocumento2 pagineGallery IsKCON Desire Tree PDF MudrassanatanNessuna valutazione finora
- Sta 305Documento156 pagineSta 305mumbi makangaNessuna valutazione finora
- CSL - Reflection Essay 1Documento7 pagineCSL - Reflection Essay 1api-314849412Nessuna valutazione finora
- 105-0004 - Significant Characteristics For Compliance With Emission RegulationsDocumento5 pagine105-0004 - Significant Characteristics For Compliance With Emission RegulationsthisisjineshNessuna valutazione finora
- Total Recall and SkepticismDocumento4 pagineTotal Recall and Skepticismdweiss99Nessuna valutazione finora
- Disciplines, Intersections and The Future of Communication Research. Journal of Communication 58 603-614iplineDocumento12 pagineDisciplines, Intersections and The Future of Communication Research. Journal of Communication 58 603-614iplineErez CohenNessuna valutazione finora
- Masterlist of Private Elem. Schools S.Y. 2016 2017 Cavite ProvinceDocumento17 pagineMasterlist of Private Elem. Schools S.Y. 2016 2017 Cavite ProvinceacinehhjNessuna valutazione finora