Potrebbero piacerti anche
- Machine Element Design CheatsheetDocumento25 pagineMachine Element Design CheatsheetDarien ChiaNessuna valutazione finora
- G4 ManualDocumento64 pagineG4 Manualfroggy12345678910100% (2)
- Fire Hydrant System Design Installation Commisioning and TestingDocumento5 pagineFire Hydrant System Design Installation Commisioning and Testingjaianit89Nessuna valutazione finora
- Column ChromatographyDocumento9 pagineColumn ChromatographyMd Shahjalal Sagor67% (3)
- Subitec Info Industrial CultivationDocumento4 pagineSubitec Info Industrial CultivationUsamah ZakiNessuna valutazione finora
- See A3964SLB: Dual Full-Bridge PWM Motor DriverDocumento8 pagineSee A3964SLB: Dual Full-Bridge PWM Motor DriverPaulo SwarosvishNessuna valutazione finora
- Protected Quad Power DriversDocumento8 pagineProtected Quad Power DriversBraulio Manuel Trejo PerezNessuna valutazione finora
- Dual H-Bridge Motor DriversDocumento8 pagineDual H-Bridge Motor DriversMilena PetrovicNessuna valutazione finora
- A2918 DatasheetDocumento8 pagineA2918 DatasheetJayanta GhoshNessuna valutazione finora
- 8-Channel Source Driver With Over-Current ProtectionDocumento8 pagine8-Channel Source Driver With Over-Current ProtectionNigromante_01Nessuna valutazione finora
- Datasheet A3967Documento16 pagineDatasheet A3967Martim BouflerNessuna valutazione finora
- A 3953 SBDocumento14 pagineA 3953 SBAndres Uribe100% (1)
- 8-Channel Source Driver With Over-Current Protection: Absolute Maximum RatingsDocumento9 pagine8-Channel Source Driver With Over-Current Protection: Absolute Maximum RatingstoufikNessuna valutazione finora
- DB en PLC RSC Osc 5156535 00 GBDocumento14 pagineDB en PLC RSC Osc 5156535 00 GBborrallaNessuna valutazione finora
- UDN2987 Datasheet PDFDocumento8 pagineUDN2987 Datasheet PDFkarimNessuna valutazione finora
- Udn2916b PDFDocumento8 pagineUdn2916b PDFSerchu_29Nessuna valutazione finora
- UDN2987 Datasheet PDFDocumento8 pagineUDN2987 Datasheet PDFkarimNessuna valutazione finora
- I/A Series Hardware 240 V Ac Input/Output Interface Module (FBM11) and 240 V Ac Expansion Input/Output Interface Module (FBM16)Documento4 pagineI/A Series Hardware 240 V Ac Input/Output Interface Module (FBM11) and 240 V Ac Expansion Input/Output Interface Module (FBM16)CHRISTIANABGNessuna valutazione finora
- Full-Bridge PWM Motor Driver: Absolute Maximum RatingsDocumento17 pagineFull-Bridge PWM Motor Driver: Absolute Maximum RatingsLizeth RodriguezNessuna valutazione finora
- GE Fanuc IC694MDL940: Output Module, Relay 2 Amp 16 Point, Non Isolated. IC694M IC694MD IC694MDLDocumento4 pagineGE Fanuc IC694MDL940: Output Module, Relay 2 Amp 16 Point, Non Isolated. IC694M IC694MD IC694MDLomarlgonzNessuna valutazione finora
- Protected Quad Power Driver: Description Features and BenefitsDocumento8 pagineProtected Quad Power Driver: Description Features and BenefitsAnkitNessuna valutazione finora
- MC7900 ONSemiconductorDocumento15 pagineMC7900 ONSemiconductorMansoor AsifNessuna valutazione finora
- AIC2951Documento8 pagineAIC2951Edson ConceicaoNessuna valutazione finora
- 350V Step-Up ConverterDocumento4 pagine350V Step-Up ConverterWesNessuna valutazione finora
- NJM3771D2Documento9 pagineNJM3771D2mahdi elmayNessuna valutazione finora
- Bimos Ii Unipolar Stepper-Motor Translator/Driver: Absolute Maximum RatingsDocumento8 pagineBimos Ii Unipolar Stepper-Motor Translator/Driver: Absolute Maximum RatingsJesusNessuna valutazione finora
- SMD L132Documento8 pagineSMD L132Aliou SouaneNessuna valutazione finora
- LM3224Documento18 pagineLM3224andreu_Nessuna valutazione finora
- Overvoltage-Protection Circuit Saves The Day: DesignfeatureDocumento3 pagineOvervoltage-Protection Circuit Saves The Day: DesignfeatureShaik Abdul HameedNessuna valutazione finora
- CLC5957 12-Bit, 70 MSPS Broadband Monolithic A/D Converter: General Description FeaturesDocumento16 pagineCLC5957 12-Bit, 70 MSPS Broadband Monolithic A/D Converter: General Description FeaturesPeter SolyomNessuna valutazione finora
- 60W Wide-Range Power Supply For LCD Monitor or TV, Using The L5991Documento17 pagine60W Wide-Range Power Supply For LCD Monitor or TV, Using The L5991Grzegorz WegnerNessuna valutazione finora
- Circuit For Accurate RTD MeasurementsDocumento7 pagineCircuit For Accurate RTD MeasurementsBruceNessuna valutazione finora
- 6.2.2.3.76 FBM242 Externally SourcedDocumento16 pagine6.2.2.3.76 FBM242 Externally SourcedEddie Gomez Villalobos0% (1)
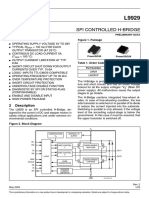
- Spi Controlled H-Bridge: 1 FeaturesDocumento23 pagineSpi Controlled H-Bridge: 1 Featuresazz zinouNessuna valutazione finora
- HP 23 (22) Xi Backlight Driver EUP2589 PDFDocumento12 pagineHP 23 (22) Xi Backlight Driver EUP2589 PDFmariusvNessuna valutazione finora
- A3979 - Micro Stepping DMOS Driver With TranslatorDocumento14 pagineA3979 - Micro Stepping DMOS Driver With TranslatorFernando Lizarraga100% (1)
- LM 2904 AhDocumento19 pagineLM 2904 AhlyndondrNessuna valutazione finora
- Dual Channel, Ultra-Low Resistance Load Switch: General Description ApplicationsDocumento10 pagineDual Channel, Ultra-Low Resistance Load Switch: General Description ApplicationsПавелNessuna valutazione finora
- AD590Documento16 pagineAD590pecis65613Nessuna valutazione finora
- Eaton Fire Addressable Mimic PCB zpcb2252 Datasheet 1217Documento1 paginaEaton Fire Addressable Mimic PCB zpcb2252 Datasheet 1217Shahbaz AlamNessuna valutazione finora
- Salwico IC21 WP: Indication Control UnitDocumento5 pagineSalwico IC21 WP: Indication Control UnitrolandseNessuna valutazione finora
- L9929 STMicroelectronicsDocumento23 pagineL9929 STMicroelectronicsJhonny ManzanoNessuna valutazione finora
- Slrs 027 QDocumento40 pagineSlrs 027 QramkumarNessuna valutazione finora
- Foxboro Evo™ Process Automation System: Product SpecificationsDocumento20 pagineFoxboro Evo™ Process Automation System: Product SpecificationsWijnandNessuna valutazione finora
- PHOENIX Model 6966197 Control RelayDocumento4 paginePHOENIX Model 6966197 Control RelaympiumettiNessuna valutazione finora
- MC7800Documento32 pagineMC7800Polo Soldas Polo SoldasNessuna valutazione finora
- LM5642 High Voltage, Dual Synchronous Buck Converter With Oscillator SynchronizationDocumento24 pagineLM5642 High Voltage, Dual Synchronous Buck Converter With Oscillator SynchronizationcsclzNessuna valutazione finora
- An 71Documento11 pagineAn 71vijaybabukoreboinaNessuna valutazione finora
- IC200MDL930Documento2 pagineIC200MDL930Sekhar Chandra MaddaliNessuna valutazione finora
- TB2929HQ: 45W × 4-ch BTL Audio Power ICDocumento17 pagineTB2929HQ: 45W × 4-ch BTL Audio Power ICRicardo Alberto BarralNessuna valutazione finora
- Up 6201Documento23 pagineUp 6201Babei IlieNessuna valutazione finora
- Linkswitch-Tn: FamilyDocumento16 pagineLinkswitch-Tn: FamilyJulián Peláez RestrepoNessuna valutazione finora
- LM2931-N Series Low Dropout Regulators: Features DescriptionDocumento33 pagineLM2931-N Series Low Dropout Regulators: Features DescriptiongpremkiranNessuna valutazione finora
- LM2931-N Series Low Dropout Regulators: Features DescriptionDocumento31 pagineLM2931-N Series Low Dropout Regulators: Features DescriptionGema LunaNessuna valutazione finora
- LM2931 DatasheetDocumento29 pagineLM2931 DatasheetTop Techno Lab CompanyNessuna valutazione finora
- LM2931-N Series Low Dropout Regulators: Features DescriptionDocumento33 pagineLM2931-N Series Low Dropout Regulators: Features DescriptionHaroldo VieiraNessuna valutazione finora
- Sjt-Yy Ard User Guide PDFDocumento9 pagineSjt-Yy Ard User Guide PDFRandy VanegasNessuna valutazione finora
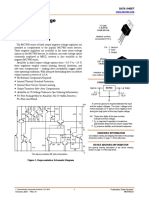
- LNB Supply and Control-Voltage Regulator: Preliminary InformationDocumento9 pagineLNB Supply and Control-Voltage Regulator: Preliminary InformationJoil AlvesNessuna valutazione finora
- Safelink CB: Gas Insulated Ring Main UnitDocumento2 pagineSafelink CB: Gas Insulated Ring Main UnitABCDNessuna valutazione finora
- Ob2262 Ver2.0 Datasheet PDFDocumento13 pagineOb2262 Ver2.0 Datasheet PDFjesus cautivoNessuna valutazione finora
- General Description: EMI Filter Ac in DC OutDocumento13 pagineGeneral Description: EMI Filter Ac in DC Outjesus cautivoNessuna valutazione finora
- Ob2262 Datasheet PDFDocumento13 pagineOb2262 Datasheet PDFjesus cautivoNessuna valutazione finora
- 2 Atr - 72-Electrical PDFDocumento61 pagine2 Atr - 72-Electrical PDFOleksandr ShevchukNessuna valutazione finora
- Seb 1242-Soil Mechanics II SuppDocumento2 pagineSeb 1242-Soil Mechanics II Suppcharler kinyuajNessuna valutazione finora
- Modern PetrochemicalsDocumento179 pagineModern PetrochemicalsHani Kirmani100% (9)
- Service Manual: Model Code - Kib19Bp3-CmgDocumento11 pagineService Manual: Model Code - Kib19Bp3-Cmgpravin jadavNessuna valutazione finora
- Wrights Offshore Hydrate Remediation Skid ArticleDocumento4 pagineWrights Offshore Hydrate Remediation Skid ArticleAnonymous ItzBhUGoiNessuna valutazione finora
- Chapter 5Documento64 pagineChapter 5pintu13Nessuna valutazione finora
- Codex 2017 enDocumento713 pagineCodex 2017 enJIgnacio123Nessuna valutazione finora
- LG Rad 226B PDFDocumento65 pagineLG Rad 226B PDFFrancisReis0% (1)
- Design and Evaluation of Inflatable Wings For UavsDocumento290 pagineDesign and Evaluation of Inflatable Wings For UavsmegustalazorraNessuna valutazione finora
- February 2016Documento104 pagineFebruary 2016Cleaner MagazineNessuna valutazione finora
- Lean Thinking Redefines O&M PracticesDocumento10 pagineLean Thinking Redefines O&M PracticesAsel Juárez ViteNessuna valutazione finora
- Critical Care Systems Test Equipment For Repairs and PMS in The USA and CanadaDocumento6 pagineCritical Care Systems Test Equipment For Repairs and PMS in The USA and CanadaMedsystem atNessuna valutazione finora
- Module 1: Introduction To Operating System: Need For An OSDocumento18 pagineModule 1: Introduction To Operating System: Need For An OSshikha2012Nessuna valutazione finora
- Datasheet Joint Isolant 4'' #300 PDFDocumento1 paginaDatasheet Joint Isolant 4'' #300 PDFseifNessuna valutazione finora
- CS-ME-13 R0 SFFECO - Fire Extinguisher Dry Chemical Powder & Co2 - TSDDocumento1 paginaCS-ME-13 R0 SFFECO - Fire Extinguisher Dry Chemical Powder & Co2 - TSDAamer Abdul MajeedNessuna valutazione finora
- EZstrip O&M Manual PDFDocumento60 pagineEZstrip O&M Manual PDFJesus S. QuijadaNessuna valutazione finora
- IQ RF MappingDocumento14 pagineIQ RF Mappingsatcom_77Nessuna valutazione finora
- Assign Chap 8Documento3 pagineAssign Chap 8nishedhNessuna valutazione finora
- Computation For Concrete Mix 120221Documento3 pagineComputation For Concrete Mix 120221MASGRO BUILDERSNessuna valutazione finora
- Java Swing Demo (Class Name Test)Documento2 pagineJava Swing Demo (Class Name Test)bejarunNessuna valutazione finora
- Calorific Value of Coal - A Useful DetailDocumento5 pagineCalorific Value of Coal - A Useful Detailkaruna346Nessuna valutazione finora
- Precio Por Escala Dosyu Efectiva HasDocumento4 paginePrecio Por Escala Dosyu Efectiva HasAliss SanchezNessuna valutazione finora
- 24 - Article - $mbps Vs $MHZ Why Is This ImportantDocumento2 pagine24 - Article - $mbps Vs $MHZ Why Is This ImportantShiraz SiddiqNessuna valutazione finora
- Greenbrier Europe Freight Wagon Catalogue (2018)Documento188 pagineGreenbrier Europe Freight Wagon Catalogue (2018)Aaron Hore100% (2)
- The Holographic Universe - Simulation Hypothesis - CrystalinksDocumento29 pagineThe Holographic Universe - Simulation Hypothesis - CrystalinkssalatieNessuna valutazione finora
- 1188CK ExampleDocumento2 pagine1188CK ExampleYurii ChinovNessuna valutazione finora