Potrebbero piacerti anche
- 2013-09-25 19-12Documento1 pagina2013-09-25 19-12bauemmvssNessuna valutazione finora
- Finite Elements in Engineering ChandrupatlaDocumento17 pagineFinite Elements in Engineering ChandrupatlaTahsinul Haque Tasif40% (5)
- Design of Partially or Fully Composite BeamsDocumento20 pagineDesign of Partially or Fully Composite BeamsbauemmvssNessuna valutazione finora
- RISA 3D ManualDocumento612 pagineRISA 3D ManualMoonzeNessuna valutazione finora
- Finite Element Analysis in StructuresDocumento16 pagineFinite Element Analysis in StructuresYahia Raad Al-AniNessuna valutazione finora
- Connection 2Documento4 pagineConnection 2bauemmvssNessuna valutazione finora
- CHW4Documento4 pagineCHW4bauemmvssNessuna valutazione finora
- 2013-09-09 21-39Documento2 pagine2013-09-09 21-39bauemmvssNessuna valutazione finora
- 4 SolutionDocumento1 pagina4 SolutionbauemmvssNessuna valutazione finora
- Autodesk Robot Structural Analysis Professional 2014 Software GuideDocumento4 pagineAutodesk Robot Structural Analysis Professional 2014 Software GuidebauemmvssNessuna valutazione finora
- Foundation V 1Documento1 paginaFoundation V 1bauemmvssNessuna valutazione finora
- 4 NodeDocumento33 pagine4 NodebauemmvssNessuna valutazione finora
- Foundation V 1Documento1 paginaFoundation V 1bauemmvssNessuna valutazione finora
- Foundation V 1Documento1 paginaFoundation V 1bauemmvssNessuna valutazione finora
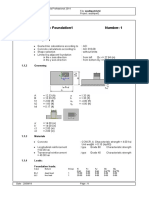
- 1 Spread Footing: Foundation1 Number: 1: 1.1 Basic DataDocumento5 pagine1 Spread Footing: Foundation1 Number: 1: 1.1 Basic DatabauemmvssNessuna valutazione finora
- 1 Spread Footing: Foundation1 Number: 1: 1.1 Basic DataDocumento5 pagine1 Spread Footing: Foundation1 Number: 1: 1.1 Basic DatabauemmvssNessuna valutazione finora
- C. Complex NumbersDocumento8 pagineC. Complex Numbersanons2472Nessuna valutazione finora
- 1 Spread Footing: Foundation1 Number: 1: 1.1 Basic DataDocumento5 pagine1 Spread Footing: Foundation1 Number: 1: 1.1 Basic DatabauemmvssNessuna valutazione finora
- Mech Science PersonalDocumento12 pagineMech Science PersonalbauemmvssNessuna valutazione finora
- Stress Gradient Effect On The Buckling of Thin PlatesDocumento26 pagineStress Gradient Effect On The Buckling of Thin PlatesbauemmvssNessuna valutazione finora
- Vensko Matt J 2008 PDFDocumento175 pagineVensko Matt J 2008 PDFbauemmvssNessuna valutazione finora
- Viswanathan 2015 IOP Conf. Ser.: Earth Environ. Sci. 23 012006Documento9 pagineViswanathan 2015 IOP Conf. Ser.: Earth Environ. Sci. 23 012006bauemmvssNessuna valutazione finora
- Autodesk Robot Structural Analysis Professional 2010 - Training Manual (Metric Version)Documento178 pagineAutodesk Robot Structural Analysis Professional 2010 - Training Manual (Metric Version)ericfgNessuna valutazione finora
- MDOT Research Report R1519 250368 7Documento30 pagineMDOT Research Report R1519 250368 7bauemmvssNessuna valutazione finora
- Euler's Formula and Hyperbolic FunctionsDocumento1 paginaEuler's Formula and Hyperbolic FunctionsbauemmvssNessuna valutazione finora
- Inelastic Lateral-Torsional Buckling of Beam-Columns Proc. ASCEDocumento70 pagineInelastic Lateral-Torsional Buckling of Beam-Columns Proc. ASCEbauemmvssNessuna valutazione finora
- Euler PDFDocumento5 pagineEuler PDFbauemmvssNessuna valutazione finora
- Lateral Torsional Buckling of I-BeamsDocumento138 pagineLateral Torsional Buckling of I-BeamsRobert Vochescu100% (1)
- Cantilever End LoadDocumento7 pagineCantilever End LoadgayathridharshiniNessuna valutazione finora
- Lateral Torsional Buckling of Steel BeamsDocumento8 pagineLateral Torsional Buckling of Steel BeamsapirakqNessuna valutazione finora
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Application of Machine Learning in Demand Forecasting: Ae 407: Production and Operations ManagementDocumento19 pagineApplication of Machine Learning in Demand Forecasting: Ae 407: Production and Operations ManagementKrishna DashNessuna valutazione finora
- Volume IIIDocumento1.145 pagineVolume IIIathanasios niotisNessuna valutazione finora
- Energy-Constrained Cooperative Spectrum Sensing in Cognitive Radio NetworksDocumento5 pagineEnergy-Constrained Cooperative Spectrum Sensing in Cognitive Radio Networkssuchi87Nessuna valutazione finora
- Maths Class 12 2023 All Pyqs Including Compart andDocumento555 pagineMaths Class 12 2023 All Pyqs Including Compart andpiyushwhatsappbackup01Nessuna valutazione finora
- Paper NN PsoDocumento17 paginePaper NN PsoDEEPAKNessuna valutazione finora
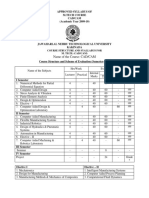
- JNTU Kakinada M.tech CAD-CAM SyllabusDocumento18 pagineJNTU Kakinada M.tech CAD-CAM SyllabusTony AryanNessuna valutazione finora
- MineScape Haul Roads - Brochure - Sep16 PDFDocumento2 pagineMineScape Haul Roads - Brochure - Sep16 PDFYesyurun SetyanisaNessuna valutazione finora
- Quantitative Techniques For Business DecisionsDocumento3 pagineQuantitative Techniques For Business DecisionsjeganrajrajNessuna valutazione finora
- An Entropy-Based Approach to Portfolio OptimizationDocumento17 pagineAn Entropy-Based Approach to Portfolio OptimizationVidaup40Nessuna valutazione finora
- Wcdma Access Problem Optimization GuideDocumento102 pagineWcdma Access Problem Optimization GuideMoustapha SanoussiNessuna valutazione finora
- DASA 2016 Conference Preliminary ProgramDocumento6 pagineDASA 2016 Conference Preliminary ProgramSaadBourouisNessuna valutazione finora
- Artificial Intelligence Syllabus BreakdownDocumento161 pagineArtificial Intelligence Syllabus Breakdownsanthi sNessuna valutazione finora
- Intelligent Heart Diseases Prediction System Using Datamining Techniques0Documento104 pagineIntelligent Heart Diseases Prediction System Using Datamining Techniques0nanimdp60% (5)
- 2.20 Optimizing Control: F. G. Shinskey C. G. Laspe B. G. Lipták M. RuelDocumento10 pagine2.20 Optimizing Control: F. G. Shinskey C. G. Laspe B. G. Lipták M. RueljigjigawNessuna valutazione finora
- Design of Broadband Reflectarray Antenna Using Machine-Learning-Assisted Optimization MethodDocumento3 pagineDesign of Broadband Reflectarray Antenna Using Machine-Learning-Assisted Optimization MethodDivyanshu BoseNessuna valutazione finora
- Deepdecision: A Mobile Deep Learning Framework For Edge Video AnalyticsDocumento9 pagineDeepdecision: A Mobile Deep Learning Framework For Edge Video AnalyticsmorganNessuna valutazione finora
- Linear Programming-Solving LPP byDocumento31 pagineLinear Programming-Solving LPP byAgatNessuna valutazione finora
- Prescriptive Analytics FundamentalsDocumento3 paginePrescriptive Analytics FundamentalsRona LabogNessuna valutazione finora
- Chapter 16Documento25 pagineChapter 16Wedaje AlemayehuNessuna valutazione finora
- ML Framework Optimizes SiC SST Design for Efficiency and Power DensityDocumento15 pagineML Framework Optimizes SiC SST Design for Efficiency and Power Densityusher jamesNessuna valutazione finora
- Evaluation of Performance of Container Terminals T PDFDocumento10 pagineEvaluation of Performance of Container Terminals T PDFjohnNessuna valutazione finora
- Grid-Price-Dependent Energy Management in MicrogridsDocumento12 pagineGrid-Price-Dependent Energy Management in MicrogridsElena CioroabaNessuna valutazione finora
- Unit III Session 08Documento44 pagineUnit III Session 08K.A.S.S PereraNessuna valutazione finora
- Merrill Lynch Pricing Analysis for Integrated Choice StrategyDocumento15 pagineMerrill Lynch Pricing Analysis for Integrated Choice StrategyHealth & WellnessNessuna valutazione finora
- Ben Vaserlan's Socionics EIE "Mentor" (ENFJ) Model G Infographic (BV's Text in Purple)Documento1 paginaBen Vaserlan's Socionics EIE "Mentor" (ENFJ) Model G Infographic (BV's Text in Purple)Ben Vaserlan100% (2)
- Miniaturization of Rectangular Microstrip Patches Using Genetic AlgorithmsDocumento4 pagineMiniaturization of Rectangular Microstrip Patches Using Genetic AlgorithmsSubba Rao ChalasaniNessuna valutazione finora
- MSPGMDocumento8 pagineMSPGMSparsh MittalNessuna valutazione finora
- MT105a Math Course for Econ and FinanceDocumento2 pagineMT105a Math Course for Econ and FinanceTeklay FitsumNessuna valutazione finora
- Shark Smell Optimization (SSO) AlgorithmDocumento11 pagineShark Smell Optimization (SSO) AlgorithmVayo SonyNessuna valutazione finora
- Simplex Method For Standard Maximization ProblemDocumento6 pagineSimplex Method For Standard Maximization ProblemyyyNessuna valutazione finora