Potrebbero piacerti anche
- Curvas de Bonjean - Lista 04Documento5 pagineCurvas de Bonjean - Lista 04Rayana Lima CintraNessuna valutazione finora
- Regras BC Nav. Inter. 2008Documento218 pagineRegras BC Nav. Inter. 2008Aragonez VidalNessuna valutazione finora
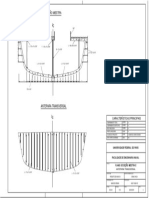
- Dona Chica - Plano de Seção Mestra e Ant - TransDocumento1 paginaDona Chica - Plano de Seção Mestra e Ant - TransMarcos RenanNessuna valutazione finora
- 352349-Fundamentos de VibraçãoDocumento51 pagine352349-Fundamentos de VibraçãoFabricio VigolloNessuna valutazione finora
- Sistemas Elétricos Marítimos - Ele 75 - Aulas 24 e 25Documento24 pagineSistemas Elétricos Marítimos - Ele 75 - Aulas 24 e 25Jefferson T. GiraoNessuna valutazione finora
- Prepom2024 - 21 - 12 - 2023 14 11 17Documento294 paginePrepom2024 - 21 - 12 - 2023 14 11 17Iuri CassaNessuna valutazione finora
- Aula ResistênciaDocumento66 pagineAula ResistênciaSidney RogérioNessuna valutazione finora
- TF - Estruturas 2Documento31 pagineTF - Estruturas 2Everson Vieira0% (1)
- Aplicando Iot Para Medir Célula De Carga Com Esp8266 (nodemcu) Programado Em ArduinoDa EverandAplicando Iot Para Medir Célula De Carga Com Esp8266 (nodemcu) Programado Em ArduinoNessuna valutazione finora
- Informativo Rigging Avançado - TechCon EngenhariaDocumento10 pagineInformativo Rigging Avançado - TechCon EngenhariaLeonardo RoncettiNessuna valutazione finora
- Marinha Do Brasil Diretoria de Portos e Costas Ensino Profissional Marítimo Módulo de Estabilidade Est Unidade de Estudo AutônomoDocumento128 pagineMarinha Do Brasil Diretoria de Portos e Costas Ensino Profissional Marítimo Módulo de Estabilidade Est Unidade de Estudo AutônomoThiago RodriguesNessuna valutazione finora
- Análise de Seção Mestra Segunda A ABSDocumento94 pagineAnálise de Seção Mestra Segunda A ABSArtur PaixãoNessuna valutazione finora
- Passo A Passo - Estabilidade em AvariaDocumento30 paginePasso A Passo - Estabilidade em AvariaBarbara Oliveira100% (1)
- 5 0 HP Manual de Operação Manutenção e Garantia - MercuryDocumento79 pagine5 0 HP Manual de Operação Manutenção e Garantia - MercuryMarcos SchiefelbeinNessuna valutazione finora
- 1 - Arquitetura NavalDocumento128 pagine1 - Arquitetura NavalPamellaNessuna valutazione finora
- N-1930 C - Insp - Serviço - Guindastes - OFFSHOREDocumento26 pagineN-1930 C - Insp - Serviço - Guindastes - OFFSHORELuciano Amâncio da SilvaNessuna valutazione finora
- Normam 02-Dpc (Cap 11)Documento9 pagineNormam 02-Dpc (Cap 11)RenanFerreiraNessuna valutazione finora
- Fric Cao 2007Documento24 pagineFric Cao 2007Feliciano Sambo100% (2)
- Vibracoes Exemplos Set 1Documento26 pagineVibracoes Exemplos Set 1Jorge B JorgeNessuna valutazione finora
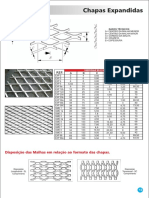
- Apresentação de Chapa Expandida PDFDocumento1 paginaApresentação de Chapa Expandida PDFFrancisco Carvalho NascimentoNessuna valutazione finora
- Normas e Materiais de SeguranÇa e NavegaÇÃo para EmbarcaÇÕesDocumento19 pagineNormas e Materiais de SeguranÇa e NavegaÇÃo para EmbarcaÇÕesapi-3704990100% (2)
- Capítulo 2 - A Organização Dos Sistemas de TransporteDocumento6 pagineCapítulo 2 - A Organização Dos Sistemas de TransporteMatheus Almeida FerreiraNessuna valutazione finora
- Hidrodinâmica 3 - Rafael Lucena (Trab1)Documento41 pagineHidrodinâmica 3 - Rafael Lucena (Trab1)Rafael LucenaNessuna valutazione finora
- NBR 8421 Identificação Por Cores Das Tubulações em EmbarcaçõesDocumento3 pagineNBR 8421 Identificação Por Cores Das Tubulações em EmbarcaçõesWesley Garcia de OliveiraNessuna valutazione finora
- Vibrações - Cap 2 - 2020-2Documento241 pagineVibrações - Cap 2 - 2020-2Rafael MatosNessuna valutazione finora
- 25-Fam 001 Cfaq I-M 2013Documento71 pagine25-Fam 001 Cfaq I-M 2013Ysmael FerreiraNessuna valutazione finora
- Propulsão Elétrica de Navios e EtcDocumento201 paginePropulsão Elétrica de Navios e EtcChristopher GarciaNessuna valutazione finora
- Segurança No Trabalho Da PescaDocumento180 pagineSegurança No Trabalho Da PescaBruno PereiraNessuna valutazione finora
- 4 Barras - Garfo Escocês - GenebraDocumento26 pagine4 Barras - Garfo Escocês - GenebraIgor NienowNessuna valutazione finora
- Projeto Balança Aerodinamica para Tunel de Vento FEAUDocumento8 pagineProjeto Balança Aerodinamica para Tunel de Vento FEAUCrystianne LilianNessuna valutazione finora
- Projeto de PontesDocumento57 pagineProjeto de PontesIara NeriNessuna valutazione finora
- 4 - Introducao Ao Apoio MaritimoDocumento11 pagine4 - Introducao Ao Apoio MaritimoIuri Carrera NovaesNessuna valutazione finora
- Apostila de EciaDocumento75 pagineApostila de EciaRenato BertoniNessuna valutazione finora
- NBR 6750 (Nov 1997) - Rodas para Automóveis - Verificação Da Durabilidade e ResistênciaDocumento3 pagineNBR 6750 (Nov 1997) - Rodas para Automóveis - Verificação Da Durabilidade e ResistênciaYuri Bahia de Vasconcelos0% (1)
- Exercícios de Mecânica Dos FluidosDocumento2 pagineExercícios de Mecânica Dos FluidosWalker MatheusNessuna valutazione finora
- NBR 12312 NB 1396 - Dimensionamento Da Protecao Catodica Galvanica de Embarcacoes Maritimas de AcDocumento4 pagineNBR 12312 NB 1396 - Dimensionamento Da Protecao Catodica Galvanica de Embarcacoes Maritimas de AcJorgelino ParkerNessuna valutazione finora
- 52-Recuperacao de Engrenagens PDFDocumento13 pagine52-Recuperacao de Engrenagens PDFLuiz Antônio FerreiraNessuna valutazione finora
- N-2170 Contec Inspeção em Serviços de Acessórios de Carga: - PúblicoDocumento24 pagineN-2170 Contec Inspeção em Serviços de Acessórios de Carga: - PúblicoPhd Rigger100% (2)
- It - FT.DRC.04.00.010 V1Documento27 pagineIt - FT.DRC.04.00.010 V1CARLOS BARBOSA100% (1)
- Bombas - UFSCDocumento11 pagineBombas - UFSCJonas AraújoNessuna valutazione finora
- Separadores CentrifugosDocumento12 pagineSeparadores CentrifugostchepssilveiraNessuna valutazione finora
- Corte e Solda SubDocumento162 pagineCorte e Solda SubMarcos OLIVEIRANessuna valutazione finora
- Falha Por FadigaDocumento41 pagineFalha Por Fadigamathews94Nessuna valutazione finora
- Hidrodinamica V15-FevDocumento68 pagineHidrodinamica V15-FevFelipe Lago100% (1)
- Atracação e FundeioDocumento21 pagineAtracação e Fundeiojconde1948Nessuna valutazione finora
- Cap. 3 - Introdução Ao Método Dos Elementos FinitosDocumento44 pagineCap. 3 - Introdução Ao Método Dos Elementos FinitosJean PazaNessuna valutazione finora
- Trabalho Motor Monofásico de Fase AuxiliarDocumento5 pagineTrabalho Motor Monofásico de Fase AuxiliarCaio BrunoNessuna valutazione finora
- Processos de Fabricação em Estaleiros - UFPE - 3Documento92 pagineProcessos de Fabricação em Estaleiros - UFPE - 3Paulo Figueiredo OliveiraNessuna valutazione finora
- Simos A N 2014 Apostila Hidrodinâmica Comportamento No Mar de Sistemas OceânicosDocumento170 pagineSimos A N 2014 Apostila Hidrodinâmica Comportamento No Mar de Sistemas OceânicosJairo R GonzzallezNessuna valutazione finora
- 12 Conselhos Anodos Sacrificiais Protecao Catodica PDFDocumento12 pagine12 Conselhos Anodos Sacrificiais Protecao Catodica PDFRobson de Freitas WerlingNessuna valutazione finora
- Sistema de Gás InerteDocumento17 pagineSistema de Gás InerteHenrique Zeitoune da Cunha100% (3)
- Apostila de Navios Gaseiros Transpetro GII - ESOG (BOMMMMM)Documento114 pagineApostila de Navios Gaseiros Transpetro GII - ESOG (BOMMMMM)cleber luisNessuna valutazione finora
- Layout de EstaleiroDocumento13 pagineLayout de EstaleiroAmanda ZebulumNessuna valutazione finora
- Hidrodinâmica e Propulsão PDFDocumento195 pagineHidrodinâmica e Propulsão PDFEDEN SARMENTONessuna valutazione finora
- B2T-950 TDocumento6 pagineB2T-950 TRafael Fernando0% (1)
- Proposta de Cancelamento de Norma BrasileiraDocumento19 pagineProposta de Cancelamento de Norma BrasileiraJuliano SampaioNessuna valutazione finora
- Projeto 1 - EleMaq1Documento8 pagineProjeto 1 - EleMaq1Julia Belarmino100% (1)
- Apostila VibraçõesDocumento71 pagineApostila Vibraçõesrodlandi2750Nessuna valutazione finora
- Controle Ótimo De Sistemas Dinâmicos: Teoria AplicadaDa EverandControle Ótimo De Sistemas Dinâmicos: Teoria AplicadaNessuna valutazione finora
- Como Instalar ShoemasterDocumento1 paginaComo Instalar Shoemastermarcos lemosNessuna valutazione finora
- Manual TraduzidoDocumento27 pagineManual Traduzidomarcos lemosNessuna valutazione finora
- Tutorial Sapato LauraDocumento12 pagineTutorial Sapato Lauramarcos lemosNessuna valutazione finora
- 2017 SSP Escrivao Ed02 V 2 0Documento74 pagine2017 SSP Escrivao Ed02 V 2 0marcos lemosNessuna valutazione finora
- DIGIMILLDocumento3 pagineDIGIMILLmarcos lemosNessuna valutazione finora
- Euro - 13067 - EDM 430CNC - Soft WorksDocumento3 pagineEuro - 13067 - EDM 430CNC - Soft Worksmarcos lemosNessuna valutazione finora
- Itinerario CouroecalcadaosDocumento1 paginaItinerario Couroecalcadaosmarcos lemosNessuna valutazione finora
- FolhaDocumento1 paginaFolhamarcos lemosNessuna valutazione finora
- Apostila Monitores Pratica de BancadaDocumento39 pagineApostila Monitores Pratica de BancadaRenato100% (2)
- Aula 4 ResultantesDocumento57 pagineAula 4 ResultantesKelly SilvaNessuna valutazione finora
- EquipamentosDocumento1 paginaEquipamentosmarcos lemosNessuna valutazione finora
- Wireless Windows XPDocumento13 pagineWireless Windows XPmarcos lemosNessuna valutazione finora
- Limites FilDocumento1 paginaLimites Filmarcos lemosNessuna valutazione finora
- LinkDocumento1 paginaLinkmarcos lemosNessuna valutazione finora
- Exercicios 05 Variaveis Aleatorias DiscretasDocumento1 paginaExercicios 05 Variaveis Aleatorias Discretasmarcos lemosNessuna valutazione finora
- Quantum Lv104Documento1 paginaQuantum Lv104marcos lemos33% (3)
- Estruturas Hipo Iso HiperDocumento0 pagineEstruturas Hipo Iso HiperAlberto KuroskiNessuna valutazione finora
- Barra RoscadaDocumento1 paginaBarra Roscadamarcos lemosNessuna valutazione finora
- Lista2 (Resolução)Documento5 pagineLista2 (Resolução)marcos lemosNessuna valutazione finora
- Lista 1Documento3 pagineLista 1marcos lemosNessuna valutazione finora
- Apostila Fresando Ens Cilindricas Dentes HelicoidaisDocumento7 pagineApostila Fresando Ens Cilindricas Dentes HelicoidaisSolideddyNessuna valutazione finora
- Prob Condicion AlDocumento6 pagineProb Condicion Almarcos lemosNessuna valutazione finora
- Região Centro OesteDocumento3 pagineRegião Centro OesteValdecyr SantosNessuna valutazione finora
- 1 Escola Da ExegeseDocumento11 pagine1 Escola Da ExegeseAna LiviaNessuna valutazione finora
- Atividade 9 - Economia Brasileira Contemporânea - G1 - T1 - 2022 - 2Documento2 pagineAtividade 9 - Economia Brasileira Contemporânea - G1 - T1 - 2022 - 2Ana Carolina CastroNessuna valutazione finora
- Questões de Prova - TRANSCAL - Marcelo e YohananDocumento13 pagineQuestões de Prova - TRANSCAL - Marcelo e YohananLUCAS RENAN OLIVEIRA CABRALNessuna valutazione finora
- Abrindo Caixa de PandoraDocumento2 pagineAbrindo Caixa de PandoraTayrine SantosNessuna valutazione finora
- Projeto MemóriaDocumento4 pagineProjeto MemóriaKelly AdamsNessuna valutazione finora
- Ebook Homenagem Ao Prof Denilson2 CORRIGIDO CORRETO 2 Thz8d8Documento128 pagineEbook Homenagem Ao Prof Denilson2 CORRIGIDO CORRETO 2 Thz8d8adilivsNessuna valutazione finora
- 06 - Descobrindo o Amor Com Os Olhos Da Alma - MioloDocumento48 pagine06 - Descobrindo o Amor Com Os Olhos Da Alma - MioloMarília Liloca100% (2)
- Edital Convocacao 003 2023Documento11 pagineEdital Convocacao 003 2023Priscilla PaixaoNessuna valutazione finora
- Tqe 01Documento13 pagineTqe 01kronos onomoNessuna valutazione finora
- Animais Ed InfDocumento8 pagineAnimais Ed InfCentro EducaçãoNessuna valutazione finora
- E-Book 6 - Arcanos Maiores - Scheyla EstevesDocumento29 pagineE-Book 6 - Arcanos Maiores - Scheyla EstevesDeê SoaresNessuna valutazione finora
- Penso Logo ExistoDocumento2 paginePenso Logo ExistoDanilson100% (1)
- Texto Seminario - Maria V Benevides Educação em DH de Que Se TrataDocumento11 pagineTexto Seminario - Maria V Benevides Educação em DH de Que Se TrataGustavo FujiNessuna valutazione finora
- Livro Didático É MuletaDocumento3 pagineLivro Didático É MuletaantonioNessuna valutazione finora
- Prof. Tacia - Lição 10 REVISÃO AV1 - Logística 22 A 26.5Documento53 pagineProf. Tacia - Lição 10 REVISÃO AV1 - Logística 22 A 26.5Fernanda VitaliNessuna valutazione finora
- Relatório de Entrega de Atividades Extensionistas Atual-2Documento2 pagineRelatório de Entrega de Atividades Extensionistas Atual-2Ana AzevedoNessuna valutazione finora
- TCC AutismoDocumento21 pagineTCC AutismoMarcia SouzaNessuna valutazione finora
- Lição 10 A Destruição de JerusalémDocumento12 pagineLição 10 A Destruição de JerusalémRomário DiasNessuna valutazione finora
- A Epistemologia Do Professor - BECKERDocumento172 pagineA Epistemologia Do Professor - BECKERCarolOenning100% (1)
- Diário de Um Ladrão de Oxigênio by AnônimoDocumento113 pagineDiário de Um Ladrão de Oxigênio by AnônimojaquelinearodriguesNessuna valutazione finora
- Ninguém É InsubstituívelDocumento2 pagineNinguém É InsubstituívelThelma Fernandes De NovaesNessuna valutazione finora
- Testes (Formato Editável)Documento34 pagineTestes (Formato Editável)Catarina FerreiraNessuna valutazione finora
- Treinamento de Força PDFDocumento59 pagineTreinamento de Força PDFCarlos ThiagoNessuna valutazione finora
- Uma Conversa Sobre A BíbliaDocumento17 pagineUma Conversa Sobre A BíbliaGustavo MoreiraNessuna valutazione finora
- Aviso - Abertura - Processo - Selecao - Regentes 2Documento6 pagineAviso - Abertura - Processo - Selecao - Regentes 2Lili CordeiroNessuna valutazione finora
- KSB Multitec 0P 2Documento21 pagineKSB Multitec 0P 2Alisson FelipeNessuna valutazione finora
- O Teste MABC Do Movimento em Criancas deDocumento12 pagineO Teste MABC Do Movimento em Criancas deJefferson Martins PaixaoNessuna valutazione finora
- Regras MatriculaDocumento9 pagineRegras Matriculapaulo bessaNessuna valutazione finora
- Curso 109906 Aula 04 v1Documento85 pagineCurso 109906 Aula 04 v1Iury NeivaNessuna valutazione finora