Potrebbero piacerti anche
- Intrumentacion Aplicada MCT 202150Documento153 pagineIntrumentacion Aplicada MCT 202150Anthony AguilaNessuna valutazione finora
- Importancia Delta Dirac ADCDocumento25 pagineImportancia Delta Dirac ADCMax100% (1)
- AnalisisSenalesMATLAB 2012Documento52 pagineAnalisisSenalesMATLAB 2012Sergio Andrade100% (2)
- Introduccion LabVIEWDocumento13 pagineIntroduccion LabVIEWISRAEL AMADORNessuna valutazione finora
- Matlab y SimulinkDocumento20 pagineMatlab y Simulinkflavioscr100% (1)
- Frecuencias y Periodos Predominantes de SismosDocumento16 pagineFrecuencias y Periodos Predominantes de SismosBriseidaNessuna valutazione finora
- Apunte Principio de HamiltonDocumento10 pagineApunte Principio de HamiltonJosé Antoinne Villanueva RiffoNessuna valutazione finora
- Aspectos Avanzados Simulink y MatlabDocumento13 pagineAspectos Avanzados Simulink y MatlabCarlos Oporto AñacatoNessuna valutazione finora
- Linealización de Modelos Matemáticos No LinealesDocumento13 pagineLinealización de Modelos Matemáticos No LinealesGloria Del AbraNessuna valutazione finora
- La Transformada ZDocumento51 pagineLa Transformada ZRicardo14100% (1)
- Señal Analogica A DigitalDocumento5 pagineSeñal Analogica A DigitalantonyprietaoNessuna valutazione finora
- Modelamiento de Sistemas Con Simulink y SimscapeDocumento22 pagineModelamiento de Sistemas Con Simulink y SimscapeJoseph SmithNessuna valutazione finora
- Optimización TopológicaDocumento29 pagineOptimización TopológicamartinNessuna valutazione finora
- Informe - Tema 01Documento36 pagineInforme - Tema 01Raul Depaz NuñezNessuna valutazione finora
- Análisis de Señales y SistemasDocumento2 pagineAnálisis de Señales y SistemasAnonymous bqJDeCNI100% (1)
- Diseño y Desarrollo de Un Sistema de Control de Posicion y Velocidad de Una Mesa SismicaDocumento159 pagineDiseño y Desarrollo de Un Sistema de Control de Posicion y Velocidad de Una Mesa SismicaDiego CamachoNessuna valutazione finora
- Práctica Modelamiento Con MatlabDocumento10 paginePráctica Modelamiento Con MatlabAlejandro CañarNessuna valutazione finora
- Condiciones de Borde Suelo-EstructuraDocumento12 pagineCondiciones de Borde Suelo-EstructuraNono_geotecNessuna valutazione finora
- Capitulo 4 Modelos Matematicos de Sistemas Fisicos (Comprimido)Documento38 pagineCapitulo 4 Modelos Matematicos de Sistemas Fisicos (Comprimido)Juan ApazaNessuna valutazione finora
- Levitador - Neumático PruebaDocumento7 pagineLevitador - Neumático PruebaManotoa Jordan AlexNessuna valutazione finora
- Taller Matlab Resistencia de Materiales 1 GL 2018Documento19 pagineTaller Matlab Resistencia de Materiales 1 GL 2018DIEGO CALDERÓN100% (1)
- Lab 4 CienciasDocumento16 pagineLab 4 CienciasJassir Junior Salinas AvalosNessuna valutazione finora
- Función de TransferenciaDocumento25 pagineFunción de TransferenciaVictor ManuelNessuna valutazione finora
- Cómo Trabaja El MEF en La PrácticaDocumento10 pagineCómo Trabaja El MEF en La Prácticairis71Nessuna valutazione finora
- Control de Posición de Un Balancín Con ArduinoDocumento35 pagineControl de Posición de Un Balancín Con ArduinoHannah S. Mejia100% (1)
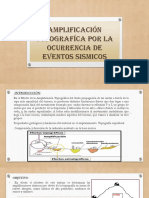
- Amplificacion TopograficaDocumento16 pagineAmplificacion TopograficacristhianNessuna valutazione finora
- Series de Fourier y Transformada de LaplaceDocumento26 pagineSeries de Fourier y Transformada de LaplaceTEMOCATIANessuna valutazione finora
- Regla de Mason 1Documento19 pagineRegla de Mason 1Royer YaguanaNessuna valutazione finora
- Lab. 1 Electronica de PotenciaDocumento5 pagineLab. 1 Electronica de PotenciaRene ReynaNessuna valutazione finora
- Fundamentos de Programación de Flujo de Datos en LabVIEW - National InstrumentsDocumento3 pagineFundamentos de Programación de Flujo de Datos en LabVIEW - National InstrumentsPabloNessuna valutazione finora
- Libro WICC 2017 ISBN 978-987-42-5143-5Documento1.388 pagineLibro WICC 2017 ISBN 978-987-42-5143-5rosaly condor sotoNessuna valutazione finora
- 1.1 Modelación de Sistemas Físicos 2015-1Documento44 pagine1.1 Modelación de Sistemas Físicos 2015-1David Sarmiento CordovaNessuna valutazione finora
- ProbabilidadDocumento10 pagineProbabilidadAntonio GonzalezNessuna valutazione finora
- Informe 1 - Grupo 6Documento30 pagineInforme 1 - Grupo 6André RoblesNessuna valutazione finora
- Ley de FaradayDocumento45 pagineLey de Faradayjose vega javierNessuna valutazione finora
- Diseño Optimo de Elementos MecanicosDocumento6 pagineDiseño Optimo de Elementos MecanicosMoises Cordero IbarraNessuna valutazione finora
- Diseño y Análisis de Controladores para Un Robot de 3GDL Con Capacidad de Dibujo - Rimachi Albites PaucarDocumento12 pagineDiseño y Análisis de Controladores para Un Robot de 3GDL Con Capacidad de Dibujo - Rimachi Albites PaucarMichael Rimachi100% (2)
- ApuntesMat024base (Clases) PDFDocumento138 pagineApuntesMat024base (Clases) PDFFrancisco Javier100% (1)
- Problemas de Ingenieria de Control Utilizando MatlabDocumento1 paginaProblemas de Ingenieria de Control Utilizando MatlabЛайла Эстер ДжимNessuna valutazione finora
- Lab 4 Placas CircularesDocumento6 pagineLab 4 Placas CircularesJULIO CESAR LARGO RAMIREZNessuna valutazione finora
- Semaforo Con VHDLDocumento7 pagineSemaforo Con VHDLTuMacho Castigador0% (1)
- La Transformada de Fourier de Señales PeriódicasDocumento31 pagineLa Transformada de Fourier de Señales PeriódicasPablo Granda OrtizNessuna valutazione finora
- AgoDic 2012 - Cap 1 IntroDocumento25 pagineAgoDic 2012 - Cap 1 IntroAdrian MorenoNessuna valutazione finora
- Mecanica Del Medio Continuo PDFDocumento33 pagineMecanica Del Medio Continuo PDFJosue OswaldoNessuna valutazione finora
- Diseño de Una Zapata Aislada SAFEDocumento65 pagineDiseño de Una Zapata Aislada SAFEBryan Davila BaylonNessuna valutazione finora
- Termodinamica y Mecanica de Los FluidosDocumento3 pagineTermodinamica y Mecanica de Los FluidosValeryn UreñaNessuna valutazione finora
- Transformada Z (Informe Ieee) .1Documento6 pagineTransformada Z (Informe Ieee) .1misusibuNessuna valutazione finora
- Tablas de Mecanica de FluidosDocumento36 pagineTablas de Mecanica de FluidosRafael CoriaNessuna valutazione finora
- Desarrollo3 tl494Documento10 pagineDesarrollo3 tl494bob75100% (1)
- Sew Mdx61b EncoderDocumento72 pagineSew Mdx61b EncoderEva SuárezNessuna valutazione finora
- Presentacion de Cinematica de MaquinasDocumento32 paginePresentacion de Cinematica de MaquinasJoel FloresNessuna valutazione finora
- Compensadores Adelanto de FaseDocumento14 pagineCompensadores Adelanto de FaseDavid GerardoNessuna valutazione finora
- Conclusiones de Torsión - Sánchez Chávez DavidDocumento8 pagineConclusiones de Torsión - Sánchez Chávez DavidDavid SanchezNessuna valutazione finora
- AcelerogramaDocumento5 pagineAcelerogramaNoemi FollanoNessuna valutazione finora
- Ejercicios de Integrales de Línea, Superficie y VolumenDa EverandEjercicios de Integrales de Línea, Superficie y VolumenValutazione: 4 su 5 stelle4/5 (2)
- Métodos numéricos para el modelado unidimensional del proceso de renovación de la cargaDa EverandMétodos numéricos para el modelado unidimensional del proceso de renovación de la cargaNessuna valutazione finora
- Solution of Mathisson-Papapetrou-Dixon equations: for spinning test particles in a Kerr metricDa EverandSolution of Mathisson-Papapetrou-Dixon equations: for spinning test particles in a Kerr metricNessuna valutazione finora
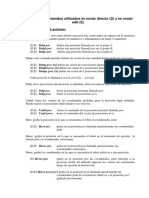
- Resumen de Comandos AClDocumento6 pagineResumen de Comandos AClEnrique Jara AlfaroNessuna valutazione finora
- Electrofisiologia (Resumida)Documento25 pagineElectrofisiologia (Resumida)Enrique Jara AlfaroNessuna valutazione finora
- Robotica Controller B ACLDocumento20 pagineRobotica Controller B ACLEnrique Jara AlfaroNessuna valutazione finora
- Lab 04 SimulinkDocumento5 pagineLab 04 SimulinkEnrique Jara AlfaroNessuna valutazione finora
- Generacion TrifasicaDocumento9 pagineGeneracion TrifasicaEnrique Jara AlfaroNessuna valutazione finora
- El TransformadorDocumento7 pagineEl TransformadorEnrique Jara AlfaroNessuna valutazione finora
- Control Proporcional Usando Matlab y ProteusDocumento8 pagineControl Proporcional Usando Matlab y ProteusEnrique Jara AlfaroNessuna valutazione finora
- Informe Final ElectromagnetismoDocumento34 pagineInforme Final ElectromagnetismoEnrique Jara AlfaroNessuna valutazione finora
- Autotransformador PDFDocumento9 pagineAutotransformador PDFEnrique Jara AlfaroNessuna valutazione finora
- Respuesta Al Impulso y Escalon Usando MatlabDocumento15 pagineRespuesta Al Impulso y Escalon Usando MatlabEnrique Jara Alfaro67% (3)
- Curva de Magnetizacion en TransformadoresDocumento9 pagineCurva de Magnetizacion en TransformadoresEnrique Jara AlfaroNessuna valutazione finora
- Transfomrada Inversa de LapalceDocumento7 pagineTransfomrada Inversa de LapalceEnrique Jara AlfaroNessuna valutazione finora
- Ejercicios 4Documento42 pagineEjercicios 4micro62003Nessuna valutazione finora
- RankineDocumento30 pagineRankineAlfredo AlvarezNessuna valutazione finora
- Medicion Industrial, Torno, Fresa, Soldadura - SenatiDocumento159 pagineMedicion Industrial, Torno, Fresa, Soldadura - SenatiEnrique Jara Alfaro50% (2)
- PNN Modificado Abri - CorlDocumento26 paginePNN Modificado Abri - CorlJoseAngelVillarViñolesNessuna valutazione finora
- AL - Resolución 295-03 PDFDocumento29 pagineAL - Resolución 295-03 PDFMatias ImoliNessuna valutazione finora
- Texturas ÍgneasDocumento34 pagineTexturas Ígneasyahoo_lectorNessuna valutazione finora
- Datos de Propiedades Mecánicas y Microestructuras Del Acero AISI 1070 Templado en Aceite de Semilla de Algodón Transesterificado EpoxidadoDocumento12 pagineDatos de Propiedades Mecánicas y Microestructuras Del Acero AISI 1070 Templado en Aceite de Semilla de Algodón Transesterificado Epoxidadokathilin yuliana nuñez gonzalezNessuna valutazione finora
- Flightgear Otro TutorialDocumento33 pagineFlightgear Otro TutorialJohn RodriguezNessuna valutazione finora
- Cálculo para La Especificación de GeotextilesDocumento1 paginaCálculo para La Especificación de GeotextilesSIABATO ORDUZ VICTOR HUGONessuna valutazione finora
- Canal de LimpiaDocumento4 pagineCanal de LimpiaanthonyNessuna valutazione finora
- Quimica Cap 10Documento65 pagineQuimica Cap 10Mark CastilloNessuna valutazione finora
- Info - Lab7 - Espinoza Ganoza JesúsDocumento5 pagineInfo - Lab7 - Espinoza Ganoza JesúsCRozilJ.EspinozaGanozaNessuna valutazione finora
- Instrucción para MasajistasDocumento8 pagineInstrucción para Masajistaspablomylove100% (1)
- Procesos MetalurgicosDocumento19 pagineProcesos MetalurgicosJunior Choque Ramos100% (2)
- Cuerpo Vivido-Educación Somática Feldenkrais PDFDocumento18 pagineCuerpo Vivido-Educación Somática Feldenkrais PDFmireyaNessuna valutazione finora
- 05 Momentos y Sistemas de Fuerzas EquivalentesDocumento54 pagine05 Momentos y Sistemas de Fuerzas EquivalentesThe GamerNessuna valutazione finora
- De Donde Venimos Quienes Somos A Donde VamosDocumento88 pagineDe Donde Venimos Quienes Somos A Donde VamosJhonny SantamariaNessuna valutazione finora
- Circulo de MohrDocumento22 pagineCirculo de MohrAlexander Muñoz Díaz50% (2)
- FISICADocumento11 pagineFISICAahsllyNessuna valutazione finora
- Expo Lubricantes FinalDocumento20 pagineExpo Lubricantes Finalemaco17Nessuna valutazione finora
- IEN - Seminario de ProblemasDocumento40 pagineIEN - Seminario de ProblemasRaul Karim Portal ReyesNessuna valutazione finora
- Repartido N°2 - Campo EléctricoDocumento2 pagineRepartido N°2 - Campo EléctricoJennylorena Calo amorinNessuna valutazione finora
- Inf Epe CH PotreroDocumento27 pagineInf Epe CH PotreroLUIGUI RAMOSNessuna valutazione finora
- Metodo Wiggins InformeDocumento8 pagineMetodo Wiggins InformeHECTOR RUBEN NAVA LEDEZMANessuna valutazione finora
- Practica 5 - UPIICSA Quimica AplicadaDocumento13 paginePractica 5 - UPIICSA Quimica AplicadaMarco GoldenNessuna valutazione finora
- URP 2021-II EEI Guia 2 Ley de Corrientes de KirchoffDocumento5 pagineURP 2021-II EEI Guia 2 Ley de Corrientes de KirchoffMilton MezaNessuna valutazione finora
- Telepresencia DERIVADASDocumento69 pagineTelepresencia DERIVADASTih FerNessuna valutazione finora
- Curso de Fotografia Digital para Principiantes PDFDocumento13 pagineCurso de Fotografia Digital para Principiantes PDFrenzogarciafalenNessuna valutazione finora
- Tipo de Actuadores EléctricosDocumento4 pagineTipo de Actuadores EléctricosEnrique AlvarezNessuna valutazione finora
- Silabo Del CursoDocumento6 pagineSilabo Del CursoJaime F. Blas DíazNessuna valutazione finora
- Guía 2 Luis NavarreteDocumento9 pagineGuía 2 Luis NavarreteLUIS FERNANDO NAVARRETE VELASCONessuna valutazione finora
- Práctica 2 - Conexiones Serie y Paralelo de ResistenciasDocumento10 paginePráctica 2 - Conexiones Serie y Paralelo de ResistenciasMonLiz23 GonzNessuna valutazione finora
- 0348-ESP-AEE-000C-000-0007 KKS Codificación de KKS de Equipos y Componentes PDFDocumento87 pagine0348-ESP-AEE-000C-000-0007 KKS Codificación de KKS de Equipos y Componentes PDFObedJiménez100% (1)