Potrebbero piacerti anche
- 8051 Microcontroller: An Applications Based IntroductionDa Everand8051 Microcontroller: An Applications Based IntroductionValutazione: 5 su 5 stelle5/5 (6)
- M1. Multi Axis Servo System Using Step Motors and Motion Control PDFDocumento37 pagineM1. Multi Axis Servo System Using Step Motors and Motion Control PDFTrân HồNessuna valutazione finora
- Flight Controller 「なぜ」 「Naze32」: Mini Fun FlyDocumento12 pagineFlight Controller 「なぜ」 「Naze32」: Mini Fun FlyVojimirNessuna valutazione finora
- English 2001-09-05Documento40 pagineEnglish 2001-09-05serdar aydınNessuna valutazione finora
- M87X en M IDocumento146 pagineM87X en M ISINU0607IITEEENessuna valutazione finora
- 728135eDocumento15 pagine728135eAbderrahim BenourNessuna valutazione finora
- Design Alternatives For A 4-Bit Universal Shift Register Using Clock Pulse Sense LatchDocumento10 pagineDesign Alternatives For A 4-Bit Universal Shift Register Using Clock Pulse Sense Latchcreative nprintNessuna valutazione finora
- Control a Robot Arm with a MicrocontrollerDocumento21 pagineControl a Robot Arm with a MicrocontrollerDixesh PatelNessuna valutazione finora
- P 40 k2 2 en - QD55x QE55x Motor Drive Instruction Manual - Pfaff Electronic Stop - FreeDocumento32 pagineP 40 k2 2 en - QD55x QE55x Motor Drive Instruction Manual - Pfaff Electronic Stop - FreealeXak Noe100% (1)
- Lect1 130erwerf202123206 Phpapp01Documento36 pagineLect1 130erwerf202123206 Phpapp01Jithendra BabuNessuna valutazione finora
- ReportDocumento14 pagineReportSachin Kumar 47Nessuna valutazione finora
- Datasheet m37512Documento87 pagineDatasheet m37512ALFAKNessuna valutazione finora
- Design and Performance Analysis of 8-Bit RISC Processor Using Xilinx & Microwind ToolDocumento10 pagineDesign and Performance Analysis of 8-Bit RISC Processor Using Xilinx & Microwind ToolRakeshconclaveNessuna valutazione finora
- Hi Target V60 GNSS RTK System ManualDocumento142 pagineHi Target V60 GNSS RTK System ManualAnonymous cDVuDlWWINessuna valutazione finora
- 8085 MicroprocessorDocumento16 pagine8085 MicroprocessorVinay FelixNessuna valutazione finora
- Presentation On Gesture Controlled Robotic ArmDocumento30 paginePresentation On Gesture Controlled Robotic ArmsuyashNessuna valutazione finora
- Ks0096 Keyestudio CNC Kit / CNC Shield V4.0 + Nano 3.0+3pcs A4988 Driver / GRBL CompatibleDocumento13 pagineKs0096 Keyestudio CNC Kit / CNC Shield V4.0 + Nano 3.0+3pcs A4988 Driver / GRBL CompatibleBarmaley67Nessuna valutazione finora
- CNC Systems ServoDocumento24 pagineCNC Systems Servocyanide_nfsNessuna valutazione finora
- Automatic traffic signal controller using 555 timer and 74160 counterDocumento23 pagineAutomatic traffic signal controller using 555 timer and 74160 counterggngg67% (3)
- Architecture and Instruction Set of the 8-bit Microprocessor 8085Documento80 pagineArchitecture and Instruction Set of the 8-bit Microprocessor 8085vsalaiselvamNessuna valutazione finora
- E 5 Axis Arm Robot TrainerDocumento401 pagineE 5 Axis Arm Robot TrainerPe Vande100% (1)
- Digsilent Powerfactory: Relay Model DescriptionDocumento16 pagineDigsilent Powerfactory: Relay Model DescriptionBra BicabaNessuna valutazione finora
- 8085 PRJ Schematic 1Documento44 pagine8085 PRJ Schematic 1Jani ServiniNessuna valutazione finora
- Zigbee Based Speed ControlDocumento68 pagineZigbee Based Speed Controlbvkarthik2711Nessuna valutazione finora
- 1 Introduction To Real-Time ControlDocumento8 pagine1 Introduction To Real-Time ControlraghavNessuna valutazione finora
- Ressorces KH MTS-86CDocumento1 paginaRessorces KH MTS-86CRafik OucheneNessuna valutazione finora
- 1st Experiment ManualDocumento5 pagine1st Experiment Manualdevonlaratt359Nessuna valutazione finora
- Coprocessor 1Documento50 pagineCoprocessor 1chandanayadav8490Nessuna valutazione finora
- Romana T-3805-EDocumento19 pagineRomana T-3805-EjorgeNessuna valutazione finora
- Creative Computing Project Report: (Cover Page of Report)Documento22 pagineCreative Computing Project Report: (Cover Page of Report)Aarya MandavganeNessuna valutazione finora
- G70364a STD ManDocumento30 pagineG70364a STD Mannyaa_joelNessuna valutazione finora
- Speedometer: Embedded Hardware Design ProjectDocumento46 pagineSpeedometer: Embedded Hardware Design ProjectYhugan RpcNessuna valutazione finora
- Lab 6Documento11 pagineLab 6vivek2mbNessuna valutazione finora
- 7ADocumento18 pagine7AMILTON GAONA BARBOZANessuna valutazione finora
- Nokia5110 - DatasheetDocumento32 pagineNokia5110 - DatasheetVinicius MontenegroNessuna valutazione finora
- Digsilent Powerfactory: Relay Model DescriptionDocumento10 pagineDigsilent Powerfactory: Relay Model DescriptionjdhajhaFDJHJNessuna valutazione finora
- Final DocumentDocumento35 pagineFinal DocumentSharath Kumar S SNessuna valutazione finora
- ES Lab FileDocumento37 pagineES Lab FileMøhït JáñgírNessuna valutazione finora
- TCM8230MDDocumento27 pagineTCM8230MDJames BalsillieNessuna valutazione finora
- CNC Shield V3 Bundle - ENDocumento22 pagineCNC Shield V3 Bundle - ENEufrosina PopaNessuna valutazione finora
- 8-Bit Otp Micro-ControllerDocumento58 pagine8-Bit Otp Micro-ControllerAbdul MuhidNessuna valutazione finora
- Manual de ScorbotDocumento6 pagineManual de ScorbotRafael G. MaciasNessuna valutazione finora
- Voice Controlled Robotic VehicleDocumento22 pagineVoice Controlled Robotic Vehiclemustafa shabanNessuna valutazione finora
- Ref 550Documento15 pagineRef 550jdhajhaFDJHJNessuna valutazione finora
- Programmable Controller for Conveyor Belt AutomationDocumento19 pagineProgrammable Controller for Conveyor Belt AutomationshantnuNessuna valutazione finora
- Principales Teorias Comercio InternaconalDocumento9 paginePrincipales Teorias Comercio InternaconalTito HerreraNessuna valutazione finora
- 8085 Lab ExperimentsDocumento70 pagine8085 Lab ExperimentsJuhil H PatelNessuna valutazione finora
- 56F80x Resolver Driver and Hardware Interface: Application NoteDocumento28 pagine56F80x Resolver Driver and Hardware Interface: Application NoteMarco Trujillo ÜNessuna valutazione finora
- Arduino Function Generator LED Matrix DisplayDocumento6 pagineArduino Function Generator LED Matrix DisplaySamarthNessuna valutazione finora
- Microprocessor & Microcontroller LabDocumento46 pagineMicroprocessor & Microcontroller LabRakesh ChoudharyNessuna valutazione finora
- 802SCDocumento16 pagine802SCNguyen Minh HieuNessuna valutazione finora
- Unit 1Documento78 pagineUnit 1Vasunthara DNessuna valutazione finora
- Xpo PLCDocumento2 pagineXpo PLCSamastha Nair SamajamNessuna valutazione finora
- IDECONDocumento6 pagineIDECONHùngNessuna valutazione finora
- Adt-7000-Im-09 (KM Chan 11.02.2024)Documento22 pagineAdt-7000-Im-09 (KM Chan 11.02.2024)ChanKamMinNessuna valutazione finora
- Delta Ia-Plc Dvp15mc&50mc B En-Din 20180911 WebDocumento8 pagineDelta Ia-Plc Dvp15mc&50mc B En-Din 20180911 WebinstNessuna valutazione finora
- Mobile Robot Control LabDocumento21 pagineMobile Robot Control LabNizar TayemNessuna valutazione finora
- 1768 CompactLogix Integrated Motion 1768-Td001 - En-PDocumento6 pagine1768 CompactLogix Integrated Motion 1768-Td001 - En-PRudimarNessuna valutazione finora
- Department of Electrical Engineering: Ee-421: Digital Sysem DesignDocumento20 pagineDepartment of Electrical Engineering: Ee-421: Digital Sysem DesignAhmed AliNessuna valutazione finora
- ACS880-01 Democase: User's ManualDocumento16 pagineACS880-01 Democase: User's ManualVoicu MarinNessuna valutazione finora
- 036909C 2bae03 Iso FW 57743 01 0S4Documento21 pagine036909C 2bae03 Iso FW 57743 01 0S4NguyenCanhBaoNessuna valutazione finora
- Grounding lug installation detailsDocumento2 pagineGrounding lug installation detailsNguyenCanhBaoNessuna valutazione finora
- 036909C 2bae05 Iso FW 57372 01 1S2Documento2 pagine036909C 2bae05 Iso FW 57372 01 1S2NguyenCanhBaoNessuna valutazione finora
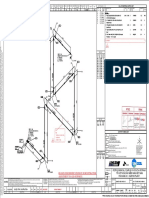
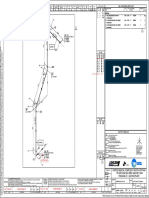
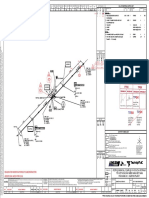
- Auto Generated Isometric for SPOOLGENDocumento4 pagineAuto Generated Isometric for SPOOLGENNguyenCanhBaoNessuna valutazione finora
- Auto-generated isometric for engineering drawingDocumento4 pagineAuto-generated isometric for engineering drawingNguyenCanhBaoNessuna valutazione finora
- 036909C 2CPR02 Iso en 56498 01 0S7Documento8 pagine036909C 2CPR02 Iso en 56498 01 0S7NguyenCanhBaoNessuna valutazione finora
- 036909C 2cae18 Iso en 23251 01 0S3Documento1 pagina036909C 2cae18 Iso en 23251 01 0S3NguyenCanhBaoNessuna valutazione finora
- 036909C 2cae02 Iso HL 26330 06 0S2Documento2 pagine036909C 2cae02 Iso HL 26330 06 0S2NguyenCanhBaoNessuna valutazione finora
- 036909C 2cae02 Iso HL 26267 03 1F1S3Documento2 pagine036909C 2cae02 Iso HL 26267 03 1F1S3NguyenCanhBaoNessuna valutazione finora
- 036909C 2CAE02 ISO HL 26118 01 0S1 Isometric Sketch Field Isometric Modifications Code 3Documento3 pagine036909C 2CAE02 ISO HL 26118 01 0S1 Isometric Sketch Field Isometric Modifications Code 3caochieuNessuna valutazione finora
- 036909C 2CAE02 ISO HL 26118 01 0S1 Isometric Sketch Field Isometric Modifications Code 3Documento3 pagine036909C 2CAE02 ISO HL 26118 01 0S1 Isometric Sketch Field Isometric Modifications Code 3caochieuNessuna valutazione finora
- Auto Generated Isometric for SPOOLGENDocumento11 pagineAuto Generated Isometric for SPOOLGENNguyenCanhBaoNessuna valutazione finora
- 036909C 2CPR01 Iso en 23251 01 0S3Documento1 pagina036909C 2CPR01 Iso en 23251 01 0S3NguyenCanhBaoNessuna valutazione finora
- 036909C 2CPR02 Iso en 51981 01 0S5Documento6 pagine036909C 2CPR02 Iso en 51981 01 0S5NguyenCanhBaoNessuna valutazione finora
- 036909C 2BPR02 Iso RGR 26036 01 0S3 CDocumento1 pagina036909C 2BPR02 Iso RGR 26036 01 0S3 CNguyenCanhBaoNessuna valutazione finora
- Bill of Material Sketch List: 3B M1 3B M1 3A M1 FDocumento5 pagineBill of Material Sketch List: 3B M1 3B M1 3A M1 FNguyenCanhBaoNessuna valutazione finora
- Auto Generated Isometric for LSP Complex ProjectDocumento1 paginaAuto Generated Isometric for LSP Complex ProjectNguyenCanhBaoNessuna valutazione finora
- Bill of Material Sketch List: Reason For Modifications by Subcontractor: Cut and Reweld Due Field Fabrication ErrorDocumento7 pagineBill of Material Sketch List: Reason For Modifications by Subcontractor: Cut and Reweld Due Field Fabrication ErrorNguyenCanhBaoNessuna valutazione finora
- Bill of Material Sketch List: Reason For Modifications by Subcontractor: Adjustment Pipe Length As Per Actual SiteDocumento2 pagineBill of Material Sketch List: Reason For Modifications by Subcontractor: Adjustment Pipe Length As Per Actual SiteNguyenCanhBaoNessuna valutazione finora
- Reason For Modifications by Subcontractor: Adjustment Follow Actual Pipe Length, Add Detail Support As Per Site ConditionsDocumento1 paginaReason For Modifications by Subcontractor: Adjustment Follow Actual Pipe Length, Add Detail Support As Per Site ConditionsNguyenCanhBaoNessuna valutazione finora
- 036909C 2bae07 Iso CBD 24521 01 0S1 CDocumento1 pagina036909C 2bae07 Iso CBD 24521 01 0S1 CNguyenCanhBaoNessuna valutazione finora
- Reason For Modification by Subcontractor: Change Joint Name Ptsc-Gj-001M1 To Ptsc-Gj-001Documento8 pagineReason For Modification by Subcontractor: Change Joint Name Ptsc-Gj-001M1 To Ptsc-Gj-001NguyenCanhBaoNessuna valutazione finora
- Auto Generated Isometric for LSP Complex ProjectDocumento8 pagineAuto Generated Isometric for LSP Complex ProjectNguyenCanhBaoNessuna valutazione finora
- Reason For Modifications by Subcontractor: Adjustment Follow Actual Pipe LengthDocumento4 pagineReason For Modifications by Subcontractor: Adjustment Follow Actual Pipe LengthNguyenCanhBaoNessuna valutazione finora
- 036909C 2CPR02 Iso HL 27112 01 1S5 CDocumento5 pagine036909C 2CPR02 Iso HL 27112 01 1S5 CNguyenCanhBaoNessuna valutazione finora
- Reason For Modifications by Subcontractor: Adjustment Follow Actual Pipe LengthDocumento2 pagineReason For Modifications by Subcontractor: Adjustment Follow Actual Pipe LengthNguyenCanhBaoNessuna valutazione finora
- This Isometric Auto Generated from SPOOLGENDocumento3 pagineThis Isometric Auto Generated from SPOOLGENNguyenCanhBaoNessuna valutazione finora
- Auto-generated isometric for pipingDocumento7 pagineAuto-generated isometric for pipingNguyenCanhBaoNessuna valutazione finora
- 036909C 2bae07 Iso Nap 10002 01 2F2S3 CDocumento7 pagine036909C 2bae07 Iso Nap 10002 01 2F2S3 CNguyenCanhBaoNessuna valutazione finora
- 036909C-2BAE02-ISO-SSC-24163-01-0F1S3-Isometric Sketch-Field Isometric - Modifications-CDocumento2 pagine036909C-2BAE02-ISO-SSC-24163-01-0F1S3-Isometric Sketch-Field Isometric - Modifications-CNguyenCanhBaoNessuna valutazione finora
- DS-KH6320-LE1 Video Intercom Network Indoor Station: Key FeatureDocumento3 pagineDS-KH6320-LE1 Video Intercom Network Indoor Station: Key FeatureLuisCabreraOroscoNessuna valutazione finora
- Evolution Series EDGE Technical Description Rev C - LetterDocumento43 pagineEvolution Series EDGE Technical Description Rev C - LetterErivelton SouzaNessuna valutazione finora
- Nordic Thingy:91: Cellular Iot Prototyping PlatformDocumento2 pagineNordic Thingy:91: Cellular Iot Prototyping PlatformluisspimNessuna valutazione finora
- Dey, Nilanjan - Mukherjee, Amartya-Embedded Systems and Robotics With Open Source Tools-CRC Press (2016)Documento198 pagineDey, Nilanjan - Mukherjee, Amartya-Embedded Systems and Robotics With Open Source Tools-CRC Press (2016)Patric_MNessuna valutazione finora
- Chapter 2 Transducers Sensors and Actuators PDFDocumento105 pagineChapter 2 Transducers Sensors and Actuators PDFramakrishnankctNessuna valutazione finora
- Synopsis IOTDocumento6 pagineSynopsis IOThemantNessuna valutazione finora
- Course ObjectivesDocumento5 pagineCourse Objectivesvinayaka1728Nessuna valutazione finora
- Basics Of: Annexure CD - 01'Documento3 pagineBasics Of: Annexure CD - 01'Gagandeep KaurNessuna valutazione finora
- Embedded SystemsDocumento25 pagineEmbedded SystemsVasavi MagadapalliNessuna valutazione finora
- WIRELESS GESTURE CONTROLLED ROBOT WITH VOICE AND VIDEO CAMERA NewDocumento83 pagineWIRELESS GESTURE CONTROLLED ROBOT WITH VOICE AND VIDEO CAMERA NewSuchitra SwarnaNessuna valutazione finora
- Professionalplus Station Software Suite: BenefitsDocumento10 pagineProfessionalplus Station Software Suite: BenefitsIzalmouna HamidNessuna valutazione finora
- Resume 1 Page RamDocumento1 paginaResume 1 Page RamRamnarayan ShreyasNessuna valutazione finora
- ES Design ProcessDocumento6 pagineES Design ProcessajiNessuna valutazione finora
- Prototyping: Prototyping: Prototypes and Production - Open Source Versus Closed SourceDocumento14 paginePrototyping: Prototyping: Prototypes and Production - Open Source Versus Closed Sourcerajeswarikannan0% (1)
- DTMF Based Home Automation System Using MicrocontrollerDocumento19 pagineDTMF Based Home Automation System Using MicrocontrollersreevaathavaNessuna valutazione finora
- Electronics 6th SemDocumento22 pagineElectronics 6th Semcoder meAshokNessuna valutazione finora
- Infineon TLE987x ProductBrief PB v01 01 enDocumento2 pagineInfineon TLE987x ProductBrief PB v01 01 enSaadNessuna valutazione finora
- EEM336 Week01 IntroductionDocumento90 pagineEEM336 Week01 IntroductionMustafa TuraçNessuna valutazione finora
- Manual M258Documento160 pagineManual M258eduardo180878Nessuna valutazione finora
- Zynq-7000 All Programmable Soc Software Developers Guide: Ug821 (V12.0) September 30, 2015Documento68 pagineZynq-7000 All Programmable Soc Software Developers Guide: Ug821 (V12.0) September 30, 2015gok gokNessuna valutazione finora
- Smart Plant PotDocumento95 pagineSmart Plant Potharshitha100% (1)
- MPLAB Getting Started 51281hDocumento44 pagineMPLAB Getting Started 51281hSimona AlexandraNessuna valutazione finora
- Module 5 RTOSDocumento23 pagineModule 5 RTOSaleenamariya2314Nessuna valutazione finora
- CSE 8th Sem Result SheetsDocumento176 pagineCSE 8th Sem Result SheetsAman SahotaNessuna valutazione finora
- Open Source RTOS Implementation For On-Board Computer (OBC) in STUDSAT-2Documento13 pagineOpen Source RTOS Implementation For On-Board Computer (OBC) in STUDSAT-2Eddy VinoNessuna valutazione finora
- Bharti School of Telecom: Developing Telecom Leaders through ExcellenceDocumento7 pagineBharti School of Telecom: Developing Telecom Leaders through ExcellenceRashi Mehrotra MehraNessuna valutazione finora
- Pfe Book 2024Documento17 paginePfe Book 2024Mahdi HERMASSINessuna valutazione finora
- POLARES 2.0 UK LQDocumento4 paginePOLARES 2.0 UK LQAlex JoseNessuna valutazione finora
- Maharashtra College OF Arts, Science and Commerce: Our VisionDocumento35 pagineMaharashtra College OF Arts, Science and Commerce: Our VisionbrijeshNessuna valutazione finora
- PUB00213R0 EtherNetIP Developers Guide PDFDocumento41 paginePUB00213R0 EtherNetIP Developers Guide PDFAnjaliNessuna valutazione finora