Potrebbero piacerti anche
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
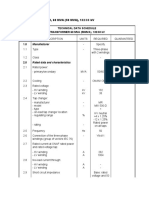
- Technical Data Schedule TRANSFORMER 60 MVA (50MVA), 132/33 KVDocumento10 pagineTechnical Data Schedule TRANSFORMER 60 MVA (50MVA), 132/33 KVGboyega AwelewaNessuna valutazione finora
- Brocade BCFA 250 Preparing BCFA Certified Professionals For The 16Gbps BCA ExamDocumento130 pagineBrocade BCFA 250 Preparing BCFA Certified Professionals For The 16Gbps BCA ExambelzebubNessuna valutazione finora
- Low Level Design Template PDFDocumento56 pagineLow Level Design Template PDFMoez Jawadi100% (1)
- Implementing DNSDocumento40 pagineImplementing DNSSantoshSangroulaNessuna valutazione finora
- Energy Use in Offices: Archived DocumentDocumento24 pagineEnergy Use in Offices: Archived DocumentClaire BernardNessuna valutazione finora
- Technical Data (IEEE Standard) : X X X XDocumento1 paginaTechnical Data (IEEE Standard) : X X X XClaire BernardNessuna valutazione finora
- Oif Cei 03.1Documento300 pagineOif Cei 03.1Claire BernardNessuna valutazione finora
- Dry TX PDFDocumento1 paginaDry TX PDFClaire BernardNessuna valutazione finora
- LS Cast Resin Transformers: Technical PerformanceDocumento20 pagineLS Cast Resin Transformers: Technical PerformanceClaire BernardNessuna valutazione finora
- Asdfasr 2 Q 4235Documento3 pagineAsdfasr 2 Q 4235Claire BernardNessuna valutazione finora
- Modelado de Un Transformador en Delta AbiertoDocumento2 pagineModelado de Un Transformador en Delta AbiertoyradyhNessuna valutazione finora
- Asdf Dsaf Sdfa Sadfasd Sadfad Sdfa Asdf Daf Sdaf SadfasdDocumento2 pagineAsdf Dsaf Sdfa Sadfasd Sadfad Sdfa Asdf Daf Sdaf SadfasdClaire BernardNessuna valutazione finora
- Asdf DJHDHFG Dsaf Sadfajfghj Sdfa Sadfasd Sadfad Sdfa Daf FGD Sdaf SadfasdDocumento3 pagineAsdf DJHDHFG Dsaf Sadfajfghj Sdfa Sadfasd Sadfad Sdfa Daf FGD Sdaf SadfasdClaire BernardNessuna valutazione finora
- AsdfwerqeuiouimjkDocumento2 pagineAsdfwerqeuiouimjkClaire BernardNessuna valutazione finora
- SadfwerweadfaDocumento2 pagineSadfwerweadfaClaire BernardNessuna valutazione finora
- ZxcvzuiyuDocumento3 pagineZxcvzuiyuClaire BernardNessuna valutazione finora
- AsdfwerqeuiouimjkDocumento2 pagineAsdfwerqeuiouimjkClaire BernardNessuna valutazione finora
- Singapore Electricity Market and YouDocumento16 pagineSingapore Electricity Market and YouClaire BernardNessuna valutazione finora
- Sustainable Cities and Society: Peter Boehme, Matthias Berger, Tobias MassierDocumento12 pagineSustainable Cities and Society: Peter Boehme, Matthias Berger, Tobias MassierClaire BernardNessuna valutazione finora
- A University District Cooling perspective-UNIMAS PDFDocumento9 pagineA University District Cooling perspective-UNIMAS PDFClaire BernardNessuna valutazione finora
- 22 Typical Campus Network Architectures and PracticesDocumento44 pagine22 Typical Campus Network Architectures and Practicesdembi86Nessuna valutazione finora
- Cisco Nexus 9000 Series NX-OS VXLAN Configuration Guide, Release 9.3 (X)Documento560 pagineCisco Nexus 9000 Series NX-OS VXLAN Configuration Guide, Release 9.3 (X)Hoang HanNessuna valutazione finora
- Datasheet Live TitaniumDocumento2 pagineDatasheet Live TitaniumMarioKunditNessuna valutazione finora
- Tutorial8 ModelanswerDocumento5 pagineTutorial8 ModelanswerWaseem ButtNessuna valutazione finora
- Ad-Hoc Routing Protocol How Does It WorkDocumento48 pagineAd-Hoc Routing Protocol How Does It WorkAbe MareraNessuna valutazione finora
- Controllogix Ethernet/Ip Bridge Module: Release NotesDocumento16 pagineControllogix Ethernet/Ip Bridge Module: Release NotesRitesh SharmaNessuna valutazione finora
- V1600d-Mini Epon Olt Introduction v1.0Documento3 pagineV1600d-Mini Epon Olt Introduction v1.0Karla SilvaNessuna valutazione finora
- Packet Tracer - Design and Implement A VLSM Addressing SchemeDocumento3 paginePacket Tracer - Design and Implement A VLSM Addressing SchemeBenj MendozaNessuna valutazione finora
- Network Tools and Techniques: Dr.P.Mohana Priya Ap - I, Department of IT, School of Computing, SASTRA Deemed UniversityDocumento77 pagineNetwork Tools and Techniques: Dr.P.Mohana Priya Ap - I, Department of IT, School of Computing, SASTRA Deemed UniversityjayshreeNessuna valutazione finora
- Disconnect Reason GuideDocumento16 pagineDisconnect Reason GuideJesus RosalesNessuna valutazione finora
- Network Connectivity: Introduction To Computing Chapter 1: Computing Essentials Lesson 5 - Network ConnectivityDocumento3 pagineNetwork Connectivity: Introduction To Computing Chapter 1: Computing Essentials Lesson 5 - Network Connectivitychadskie20Nessuna valutazione finora
- 98.1 98 Packet CaptureDocumento6 pagine98.1 98 Packet CaptureAyanNessuna valutazione finora
- CP R76 VPN AdminGuideDocumento297 pagineCP R76 VPN AdminGuideBenNessuna valutazione finora
- Multicast-VPN - IP Multicast Support For MPLS VPNsDocumento166 pagineMulticast-VPN - IP Multicast Support For MPLS VPNsVũ Hải QuânNessuna valutazione finora
- Liebert Intellislot Unity Card: User Manual-Web, SNMP, Modbus, Bacnet, IpDocumento36 pagineLiebert Intellislot Unity Card: User Manual-Web, SNMP, Modbus, Bacnet, IplucasengcpsNessuna valutazione finora
- 7.3.7 Lab 4 - View The Switch MAC Address TableDocumento8 pagine7.3.7 Lab 4 - View The Switch MAC Address TablePham Quang Huy (K16HL)Nessuna valutazione finora
- 24.1.4 Lab - Implement Flexible Netflow - ILMDocumento22 pagine24.1.4 Lab - Implement Flexible Netflow - ILMTRYST CHAMANessuna valutazione finora
- Best Practice Configuration For Brocade 7500Documento3 pagineBest Practice Configuration For Brocade 7500Ankey DonNessuna valutazione finora
- Computer Network Final ExamDocumento4 pagineComputer Network Final ExamMary JOy BOrjaNessuna valutazione finora
- ZecaDocumento2 pagineZecaanon-764268Nessuna valutazione finora
- Chelsio ItsummitDocumento12 pagineChelsio ItsummitSabeel RockNessuna valutazione finora
- UDP Server-Client Implementation in C - GeeksforGeeksDocumento10 pagineUDP Server-Client Implementation in C - GeeksforGeeksTHAKKAR NARAYAN JAISUKHLALNessuna valutazione finora
- Olt Show RumDocumento17 pagineOlt Show RumJARAMILLO HNessuna valutazione finora
- Session 3 - Wired and Wireless ExamplesDocumento11 pagineSession 3 - Wired and Wireless ExampleskiruthikaNessuna valutazione finora
- (User Manual) USR DR302 User ManualDocumento70 pagine(User Manual) USR DR302 User ManualٍJordan SportNessuna valutazione finora
- Example Site Survey Project Report TemplateDocumento9 pagineExample Site Survey Project Report TemplateCuong TranNessuna valutazione finora
- BA400 LIS Protocol - ASTM+HL7 V 0.4Documento105 pagineBA400 LIS Protocol - ASTM+HL7 V 0.4박수희Nessuna valutazione finora