Potrebbero piacerti anche
- Indo - Farm - Equipment LTDDocumento49 pagineIndo - Farm - Equipment LTDƎɯox SatíshNessuna valutazione finora
- Parle-G Marketing StrategyDocumento64 pagineParle-G Marketing StrategyGurpreet SinghNessuna valutazione finora
- A Study On Training and Development of Employees in Salem Steel PlantDocumento59 pagineA Study On Training and Development of Employees in Salem Steel PlantPrashant Pandey100% (1)
- Engine-Mounted Air Compressors (LEBW0007-01)Documento16 pagineEngine-Mounted Air Compressors (LEBW0007-01)Djebali MouradNessuna valutazione finora
- A Study On Marketing Strategies of Colgate Palmolive LTDDocumento58 pagineA Study On Marketing Strategies of Colgate Palmolive LTDVeronica BulatNessuna valutazione finora
- Biochemistry II (Electron Transport System Execise UM Biomed)Documento11 pagineBiochemistry II (Electron Transport System Execise UM Biomed)kiedd_04Nessuna valutazione finora
- 1.isaac Newton BiographyDocumento2 pagine1.isaac Newton BiographyBrajamohan Thakuria100% (1)
- Project Report On Personal Loan CompressDocumento62 pagineProject Report On Personal Loan CompressSudhakar GuntukaNessuna valutazione finora
- Company Profile and ProductsDocumento53 pagineCompany Profile and ProductsTarun KumarNessuna valutazione finora
- Marketing Research-Amway India LTDDocumento53 pagineMarketing Research-Amway India LTDSunny Chauhan25% (4)
- Ackermann Steering MechanismDocumento3 pagineAckermann Steering MechanismAshwin KumarNessuna valutazione finora
- Report of Construction Worker-FinalDocumento62 pagineReport of Construction Worker-FinalRajendra JoshiNessuna valutazione finora
- AUTO CLUTCH CONTROL FOR VEHICLESDocumento34 pagineAUTO CLUTCH CONTROL FOR VEHICLESAakash DindigulNessuna valutazione finora
- Project On Reliance MoneyDocumento74 pagineProject On Reliance MoneyMrudul JoshiNessuna valutazione finora
- Soil Stabilization by Using Lime & Rice Husk Ash: A Seminar ReportDocumento50 pagineSoil Stabilization by Using Lime & Rice Husk Ash: A Seminar ReportVIKAS GUPTANessuna valutazione finora
- A O F S A Through Ratio Analysis AT: Bhushan Steel LimitedDocumento58 pagineA O F S A Through Ratio Analysis AT: Bhushan Steel LimitedASHIS KUMARNessuna valutazione finora
- Design of Flexible Granular PavementsDocumento21 pagineDesign of Flexible Granular Pavementswidyo saptotoNessuna valutazione finora
- Comparative Study of Consumer Behaviour Preferance To Mcdonald, KFC & Pizza Hut in Noida & Greater Noida (Hierank)Documento74 pagineComparative Study of Consumer Behaviour Preferance To Mcdonald, KFC & Pizza Hut in Noida & Greater Noida (Hierank)deepakNessuna valutazione finora
- Honda Cars Project Report 2Documento16 pagineHonda Cars Project Report 2Sheenam AroraNessuna valutazione finora
- Toyota Final Project ReportDocumento52 pagineToyota Final Project ReportAnkur RaoNessuna valutazione finora
- Consumer Satisfaction and Market Analysis for Vrushali InfotechDocumento50 pagineConsumer Satisfaction and Market Analysis for Vrushali InfotechVijay AbhangeNessuna valutazione finora
- Customer Satisfaction Survey of Shrenik MotorsDocumento96 pagineCustomer Satisfaction Survey of Shrenik MotorsShalini KNessuna valutazione finora
- Air CompressorsDocumento14 pagineAir CompressorsEduardo Belvis Jr.Nessuna valutazione finora
- MRF Financial Statement Analysis ReportDocumento27 pagineMRF Financial Statement Analysis ReportRushang PatelNessuna valutazione finora
- Iip Tvs PVT LTD ReportDocumento21 pagineIip Tvs PVT LTD Reportaswin raja100% (1)
- Or Project On ToyotaDocumento62 pagineOr Project On ToyotaHimanshu GuptaNessuna valutazione finora
- Study On Sales Promotion Activities of Automobile IndustryDocumento90 pagineStudy On Sales Promotion Activities of Automobile IndustryArafat NakhudaNessuna valutazione finora
- Customer Satisfaction of Life Insurance CompaniesDocumento7 pagineCustomer Satisfaction of Life Insurance CompaniesGudiyaNessuna valutazione finora
- Satish Bajaj FinservDocumento71 pagineSatish Bajaj FinservAnjaliNessuna valutazione finora
- Perception of Customers Towards Shriram Shriram Finance Co - Litd Project Reprot Mba MKTDocumento71 paginePerception of Customers Towards Shriram Shriram Finance Co - Litd Project Reprot Mba MKTBabasab Patil (Karrisatte)0% (1)
- A Study On Brand Positioning of Birla Cement With Special Reference To Bhilwara-Utkarsh Dev SinghDocumento83 pagineA Study On Brand Positioning of Birla Cement With Special Reference To Bhilwara-Utkarsh Dev SinghStarNessuna valutazione finora
- Consumer Satisfaction On Reliance Mutual FundDocumento90 pagineConsumer Satisfaction On Reliance Mutual Fundnikhil_jbpNessuna valutazione finora
- Analysis and Design of Shear Wall For An Earthquake Resistant Building Using ETABSDocumento7 pagineAnalysis and Design of Shear Wall For An Earthquake Resistant Building Using ETABSIJIRSTNessuna valutazione finora
- Solar Water Purifier 1Documento40 pagineSolar Water Purifier 1Srini0% (1)
- A Study On Customer Prefernces Towards Credit Cards in HDFC BankDocumento40 pagineA Study On Customer Prefernces Towards Credit Cards in HDFC BankSharathNessuna valutazione finora
- A Study On Effectiveness of Cost Benefit Analysis in Dharani Sugars and Chemicals LTD., VasudevanallurDocumento85 pagineA Study On Effectiveness of Cost Benefit Analysis in Dharani Sugars and Chemicals LTD., VasudevanallurJanagar Raja SNessuna valutazione finora
- (Hard Bound) Project Report On Dreamz Colour (Kamdhenu Paint)Documento55 pagine(Hard Bound) Project Report On Dreamz Colour (Kamdhenu Paint)Ankur SrivastavaNessuna valutazione finora
- Consumer Perception Towards Agriculture Tractors (60 HP Class) "A Comparative Study of Mahindra & Mahindra and EscortDocumento59 pagineConsumer Perception Towards Agriculture Tractors (60 HP Class) "A Comparative Study of Mahindra & Mahindra and EscortJag Jeet100% (4)
- Financial Analysis On Scooters India LimitedDocumento9 pagineFinancial Analysis On Scooters India LimitedMohit KanjwaniNessuna valutazione finora
- Fast Charger With Auto Cut OffDocumento3 pagineFast Charger With Auto Cut OffAlberto BrulNessuna valutazione finora
- A Project Report MeplDocumento56 pagineA Project Report MeplSuraj GhongeNessuna valutazione finora
- LatheMachinePPT Group2Documento28 pagineLatheMachinePPT Group2Saswat RoutNessuna valutazione finora
- Ashok Leyland ProjectDocumento122 pagineAshok Leyland Projectpmp0409Nessuna valutazione finora
- A Study On Customer Satisfaction Towards Sales and Service of Ambal AutoDocumento19 pagineA Study On Customer Satisfaction Towards Sales and Service of Ambal AutoGanesh Raja100% (1)
- Marketing Strategies of Amway Corporation 2015Documento79 pagineMarketing Strategies of Amway Corporation 2015rohanNessuna valutazione finora
- Shriram Institute OF Management Technology: A Project ON 4P'S IN FlexituffDocumento68 pagineShriram Institute OF Management Technology: A Project ON 4P'S IN Flexituffcafe customercareNessuna valutazione finora
- InternshipDocumento45 pagineInternshipeshatyagi050100% (1)
- Summer Internship Project On Motilal Oswal Financial Service LimitedDocumento50 pagineSummer Internship Project On Motilal Oswal Financial Service Limitedpallavi thakurNessuna valutazione finora
- A Project On "Customer Satisfaction Towards Hyundai Motors"Documento73 pagineA Project On "Customer Satisfaction Towards Hyundai Motors"Neelima ChauhanNessuna valutazione finora
- A Study On Customer Satisfaction Towards Honda Bikes in Coimbator PDFDocumento43 pagineA Study On Customer Satisfaction Towards Honda Bikes in Coimbator PDFChahat Naik60% (5)
- Automatic Tire Pressure Inflation SystemDocumento17 pagineAutomatic Tire Pressure Inflation SystemDishant PrasadNessuna valutazione finora
- Promotional Study of Birla Sun LifeDocumento38 paginePromotional Study of Birla Sun LifeNitinAgnihotriNessuna valutazione finora
- Sales Promotion Presentation V4 - FinalDocumento23 pagineSales Promotion Presentation V4 - FinalAditya MishraNessuna valutazione finora
- Customer SatisfactionDocumento63 pagineCustomer Satisfactionkavithamba0054100% (3)
- Ackermann steering model analysisDocumento17 pagineAckermann steering model analysisNinad Mirajgaonkar50% (2)
- Mechanics Lab Assignment #3Documento4 pagineMechanics Lab Assignment #3Farhan AminNessuna valutazione finora
- Lab no 7 meen21101037Documento8 pagineLab no 7 meen21101037Ali MunawarNessuna valutazione finora
- Project ReportDocumento57 pagineProject ReportMathavan KuttyNessuna valutazione finora
- Study of Four Wheel Steering Mechanism: JournalDocumento4 pagineStudy of Four Wheel Steering Mechanism: JournalSiva HariNessuna valutazione finora
- The Perfect Corner 2: A Driver's Step-by-Step Guide to Optimizing Complex Sections Through the Physics of RacingDa EverandThe Perfect Corner 2: A Driver's Step-by-Step Guide to Optimizing Complex Sections Through the Physics of RacingNessuna valutazione finora
- Student Slides06 PDFDocumento28 pagineStudent Slides06 PDFPranay KumarNessuna valutazione finora
- Business Accounting For EngineersDocumento2 pagineBusiness Accounting For EngineersNinad MirajgaonkarNessuna valutazione finora
- Everything in AccountingDocumento322 pagineEverything in Accountingrohitwarman100% (2)
- SynonymsDocumento1 paginaSynonymsNinad MirajgaonkarNessuna valutazione finora
- SynonymsDocumento77 pagineSynonymsNinad MirajgaonkarNessuna valutazione finora
- HUM1006 Business-Accounting-for-Engineers TH 1 AC41 PDFDocumento1 paginaHUM1006 Business-Accounting-for-Engineers TH 1 AC41 PDFNishant KamalNessuna valutazione finora
- SynonymsDocumento1 paginaSynonymsNinad MirajgaonkarNessuna valutazione finora
- Non Metallic External Gear PumpDocumento1 paginaNon Metallic External Gear PumpNinad MirajgaonkarNessuna valutazione finora
- Da1 ScribdDocumento7 pagineDa1 ScribdNinad MirajgaonkarNessuna valutazione finora
- Da2 ScribdDocumento6 pagineDa2 ScribdNinad MirajgaonkarNessuna valutazione finora
- SynonymsDocumento1 paginaSynonymsNinad MirajgaonkarNessuna valutazione finora
- Da1 ScribdDocumento7 pagineDa1 ScribdNinad MirajgaonkarNessuna valutazione finora
- Ackermann steering model analysisDocumento17 pagineAckermann steering model analysisNinad Mirajgaonkar50% (2)
- Da1 ScribdDocumento7 pagineDa1 ScribdNinad MirajgaonkarNessuna valutazione finora
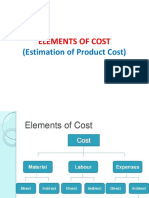
- Elements of CostDocumento42 pagineElements of CostNinad MirajgaonkarNessuna valutazione finora
- Machine Drawing: Project MembersDocumento2 pagineMachine Drawing: Project MembersNinad MirajgaonkarNessuna valutazione finora
- Energy Generation From WasteDocumento7 pagineEnergy Generation From WasteNinad MirajgaonkarNessuna valutazione finora
- Design Diesel-Photovoltaic Hybrid Power PlantDocumento93 pagineDesign Diesel-Photovoltaic Hybrid Power PlantDaniel Okere100% (1)
- Comment To RTDocumento32 pagineComment To RTLim Wee BengNessuna valutazione finora
- Load Cell (UTM)Documento1 paginaLoad Cell (UTM)José Rubén Ramos GarzaNessuna valutazione finora
- Voice PortalDocumento8 pagineVoice PortalthegownuproosterNessuna valutazione finora
- VW T-Cross 2019+ - Connector ViewsDocumento220 pagineVW T-Cross 2019+ - Connector ViewsMucowera AshaNessuna valutazione finora
- Plate Girder DesignDocumento109 paginePlate Girder Designhasib100% (3)
- Driver Control Master NXT Service Manual 092137-8Documento53 pagineDriver Control Master NXT Service Manual 092137-8Piero Capretti0% (1)
- ID-Operator Guide r2Documento138 pagineID-Operator Guide r2Mahdi DehghankarNessuna valutazione finora
- Verdi TCL TrainingDocumento24 pagineVerdi TCL TrainingPratyush ShrotriyaNessuna valutazione finora
- Tensile Test AnalysisDocumento8 pagineTensile Test AnalysisNazmul HasanNessuna valutazione finora
- User Manual Kxtda 30 600Documento252 pagineUser Manual Kxtda 30 600kabeh1Nessuna valutazione finora
- IES Syllabus For Mechanical Engineering IES 2015 Syllabus MEDocumento5 pagineIES Syllabus For Mechanical Engineering IES 2015 Syllabus MERohitMishraNessuna valutazione finora
- AF09-30-01-13 100-250V50/60HZ-DC Contactor: Product-DetailsDocumento5 pagineAF09-30-01-13 100-250V50/60HZ-DC Contactor: Product-DetailsTheo Pozo JNessuna valutazione finora
- Banner Printing Set UpDocumento21 pagineBanner Printing Set UpAsanka ChandimaNessuna valutazione finora
- ROC800-Series IEC 62591 Interface: ScalabilityDocumento10 pagineROC800-Series IEC 62591 Interface: ScalabilityBMNessuna valutazione finora
- Reaffirmed Indian Standards for Water Resources DepartmentDocumento2 pagineReaffirmed Indian Standards for Water Resources Departmentjamjam75Nessuna valutazione finora
- Windows 10 BasicsDocumento22 pagineWindows 10 BasicsMustafa RadaidehNessuna valutazione finora
- MLU Spec Sheet 250W 255WDocumento2 pagineMLU Spec Sheet 250W 255WAdrian TurcanuNessuna valutazione finora
- Brockcommons Constructionoverview WebDocumento28 pagineBrockcommons Constructionoverview WebcauecarromeuNessuna valutazione finora
- Clements High School Celebrating 30 Years of Academic ExcellenceDocumento22 pagineClements High School Celebrating 30 Years of Academic ExcellenceclementsrangersNessuna valutazione finora
- IC EngineDocumento2 pagineIC EnginePrince SethiNessuna valutazione finora
- Seller DashboardDocumento8 pagineSeller DashboardAditya KumarNessuna valutazione finora
- IADC WC Intro LevelDocumento18 pagineIADC WC Intro LevelMohsen100% (1)
- 2 Hinged ArchDocumento19 pagine2 Hinged ArchSaeed_HassaniurscorpNessuna valutazione finora
- Super PaveDocumento20 pagineSuper PaveHashem EL-MaRimeyNessuna valutazione finora
- Ship Stability 5Documento31 pagineShip Stability 5jeaneva guiaoNessuna valutazione finora
- 04 - Motion in Two DimensionDocumento3 pagine04 - Motion in Two DimensionMathan KalyanasundaramNessuna valutazione finora
- Equipment Schedule HVACDocumento7 pagineEquipment Schedule HVACHussainShabbirNessuna valutazione finora
- NFPA 20 Pump CharactaristicsDocumento1 paginaNFPA 20 Pump Charactaristicsmohammad awedNessuna valutazione finora
- API 5l Grade l245 PipesDocumento1 paginaAPI 5l Grade l245 PipesMitul MehtaNessuna valutazione finora