Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (894)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Xerox Management Failed To See The Opportunities Afforded by Many of The Innovations at ParcDocumento2 pagineXerox Management Failed To See The Opportunities Afforded by Many of The Innovations at Parcambrosialnectar50% (2)
- Web Development and Beyond - 2017.03 PDFDocumento63 pagineWeb Development and Beyond - 2017.03 PDFnegisbabiNessuna valutazione finora
- FU Money PDFDocumento240 pagineFU Money PDFManuel VértizNessuna valutazione finora
- KPMG Global Automotive Retail Market StudyDocumento28 pagineKPMG Global Automotive Retail Market StudydeepakkkeniNessuna valutazione finora
- 01 General InformationDocumento6 pagine01 General InformationnegisbabiNessuna valutazione finora
- Effect of Wind Speed On Structural Behaviour of Monopole and Self-Support Telecommunication TowersDocumento18 pagineEffect of Wind Speed On Structural Behaviour of Monopole and Self-Support Telecommunication TowersnegisbabiNessuna valutazione finora
- BOQ Office BuildingsDocumento24 pagineBOQ Office BuildingsRonnie Albert MonteroNessuna valutazione finora
- Division 16.telecommunication Tower Standards Section 17-311. Telecommunication Towers and Antennas: General ProvisionDocumento9 pagineDivision 16.telecommunication Tower Standards Section 17-311. Telecommunication Towers and Antennas: General ProvisionVirubinnya ViruNessuna valutazione finora
- Structural Analysis of Steel TowersDocumento11 pagineStructural Analysis of Steel TowersGunabalasingam JeneevanNessuna valutazione finora
- Growing Scallions (Green Onions) For Market GardenersDocumento3 pagineGrowing Scallions (Green Onions) For Market GardenersnegisbabiNessuna valutazione finora
- Computer Science 2020-2021 Program Sheet: Artificial Intelligence TrackDocumento2 pagineComputer Science 2020-2021 Program Sheet: Artificial Intelligence TracknegisbabiNessuna valutazione finora
- Transmission Tower Modeling By: George T. Watson PEDocumento11 pagineTransmission Tower Modeling By: George T. Watson PEGeorge MainaNessuna valutazione finora
- International Lhoist Berghmans Master ScholarshipDocumento2 pagineInternational Lhoist Berghmans Master ScholarshipnegisbabiNessuna valutazione finora
- Wonderful Ethiopians EbookDocumento174 pagineWonderful Ethiopians Ebookልጅ ኦሪ100% (1)
- How To Develop Money-Making Niche PDFDocumento43 pagineHow To Develop Money-Making Niche PDFnegisbabiNessuna valutazione finora
- Unit1 PDFDocumento45 pagineUnit1 PDFMartin Sebastian Gomez GalizziNessuna valutazione finora
- DE Tower Eurocode Partial FactorsDocumento2 pagineDE Tower Eurocode Partial FactorsnegisbabiNessuna valutazione finora
- A Comparative Criteria Method For TelecommunicatioDocumento9 pagineA Comparative Criteria Method For TelecommunicationegisbabiNessuna valutazione finora
- Ten Steps To Linux SurvivalDocumento189 pagineTen Steps To Linux SurvivalNataly CastilloNessuna valutazione finora
- Wind Load On The Antenna and AppurtenancesDocumento2 pagineWind Load On The Antenna and AppurtenancesnegisbabiNessuna valutazione finora
- Adisu FentawDocumento138 pagineAdisu FentawnegisbabiNessuna valutazione finora
- Integrated Finite Elements Analysis and Design of StructuresDocumento50 pagineIntegrated Finite Elements Analysis and Design of Structuresaeiou321Nessuna valutazione finora
- A Comparative Criteria Method For TelecommunicatioDocumento9 pagineA Comparative Criteria Method For TelecommunicationegisbabiNessuna valutazione finora
- ExerciseDocumento15 pagineExerciseNguyen NamNessuna valutazione finora
- 04 Input and OutputDocumento10 pagine04 Input and OutputnegisbabiNessuna valutazione finora
- 13 NLP III HandoutDocumento8 pagine13 NLP III HandoutnegisbabiNessuna valutazione finora
- Teaching Kids Whats The Weather Like Lesson PlanDocumento3 pagineTeaching Kids Whats The Weather Like Lesson PlannegisbabiNessuna valutazione finora
- Sity MensurDocumento91 pagineSity MensurnegisbabiNessuna valutazione finora
- Format Requirements For An Appendix (Or Appendices)Documento2 pagineFormat Requirements For An Appendix (Or Appendices)negisbabiNessuna valutazione finora
- Sity MensurDocumento91 pagineSity MensurnegisbabiNessuna valutazione finora
- 6 Methods of Data Collection PDFDocumento30 pagine6 Methods of Data Collection PDFKristine Agustin100% (4)
- Toolkit13 Sec9 PDFDocumento36 pagineToolkit13 Sec9 PDFrohit1999Nessuna valutazione finora
- 2014 Brochure EN FERMENTECDocumento18 pagine2014 Brochure EN FERMENTECP RAJAVELUNessuna valutazione finora
- EA - Maturity ModelDocumento12 pagineEA - Maturity ModelAntonius SonyNessuna valutazione finora
- CHRIST (Deemed to be University) School of Engineering and Technology Department of Mechanical and Automobile Engineering ME636OE4 – PROJECT MANAGEMENT ASSIGNMENT #1Documento5 pagineCHRIST (Deemed to be University) School of Engineering and Technology Department of Mechanical and Automobile Engineering ME636OE4 – PROJECT MANAGEMENT ASSIGNMENT #1NIRMAL RAJESH 1860434Nessuna valutazione finora
- Conclusion and RecommendationDocumento2 pagineConclusion and RecommendationKholidi ChooNessuna valutazione finora
- Transparent Corrugated Sheets Product OverviewDocumento13 pagineTransparent Corrugated Sheets Product OverviewBharathVenkatachalamNessuna valutazione finora
- CFD Analysis of Rotor Blade of HelicopterDocumento56 pagineCFD Analysis of Rotor Blade of HelicopterPalaniammal.R100% (1)
- CV Alberto EduardoDocumento5 pagineCV Alberto EduardoAlberto EduardoNessuna valutazione finora
- Planning User 11122300Documento124 paginePlanning User 11122300PrashantRanjan2010Nessuna valutazione finora
- The Envelopes of The Arts Centre in SingaporeDocumento12 pagineThe Envelopes of The Arts Centre in SingaporeAndriNessuna valutazione finora
- Introduction To PMBOK - 2014Documento49 pagineIntroduction To PMBOK - 2014'babi MulugetaNessuna valutazione finora
- 1 Databases and Database Management SystemsDocumento83 pagine1 Databases and Database Management SystemsUday KumarNessuna valutazione finora
- Written Lockout/Tagout Program University of South Carolina (Enter Department Name Here)Documento13 pagineWritten Lockout/Tagout Program University of South Carolina (Enter Department Name Here)SaidNessuna valutazione finora
- Edexcel GCE: Decision Mathematics D1 Advanced/Advanced SubsidiaryDocumento24 pagineEdexcel GCE: Decision Mathematics D1 Advanced/Advanced SubsidiarymizmellNessuna valutazione finora
- Hoists and Winches: The Hoist & Winch Business Unit ProfileDocumento2 pagineHoists and Winches: The Hoist & Winch Business Unit ProfileMuhammad Rifqi AninditoNessuna valutazione finora
- Forged Gate, Globe and Check Valves CatalogDocumento80 pagineForged Gate, Globe and Check Valves CatalogSulist N WahyudieNessuna valutazione finora
- Wilson Sporting Goods V Rawlings Sporting GoodsDocumento38 pagineWilson Sporting Goods V Rawlings Sporting GoodsDarren Adam HeitnerNessuna valutazione finora
- ISA RP60.3 Human Engineering For Control CentersDocumento22 pagineISA RP60.3 Human Engineering For Control CentersDaniel Arrieta DarrásNessuna valutazione finora
- GGM Enhancement Project Drawings Log Sheet UpdatedDocumento198 pagineGGM Enhancement Project Drawings Log Sheet UpdatedJohn BuntalesNessuna valutazione finora
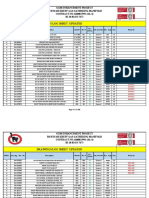
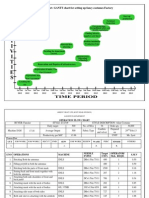
- GANTT Chart and Opertn BRK DwnsDocumento10 pagineGANTT Chart and Opertn BRK DwnsJyoti PathrejaNessuna valutazione finora
- Maintenance Technician Job OpeningDocumento1 paginaMaintenance Technician Job OpeningRizky NafandyNessuna valutazione finora
- Method Statement For Installation of Aftercooler Compressor E-2180Documento11 pagineMethod Statement For Installation of Aftercooler Compressor E-2180Anyanele Nnamdi FelixNessuna valutazione finora
- Cylinders FullDocumento110 pagineCylinders FulltnvishNessuna valutazione finora
- Support Dept Cost Allocation - 3 Allocation MethodsDocumento6 pagineSupport Dept Cost Allocation - 3 Allocation MethodsSophie PearsonNessuna valutazione finora
- Remedial Examination in EmtechDocumento2 pagineRemedial Examination in EmtechJessuel Larn-epsNessuna valutazione finora
- Tube Cutter: MS-TC-308Documento1 paginaTube Cutter: MS-TC-308Claudio SavazziNessuna valutazione finora
- Bartec Headed Bars Qualification File and References 2017.09.08Documento35 pagineBartec Headed Bars Qualification File and References 2017.09.08Andres Hermoso MeijideNessuna valutazione finora
- 2016 en PSDHandbook 2016 ScreenDocumento241 pagine2016 en PSDHandbook 2016 ScreenpreydisNessuna valutazione finora
- Comsoal: Computer Method For Sequencing Operations For Assembly LinesDocumento30 pagineComsoal: Computer Method For Sequencing Operations For Assembly LinesCarson HungNessuna valutazione finora