Potrebbero piacerti anche
- ArduinoDocumento35 pagineArduinoAashrey JainNessuna valutazione finora
- Arduino Programming For ESD: by MD - Dedarul HasanDocumento38 pagineArduino Programming For ESD: by MD - Dedarul HasandedarulNessuna valutazione finora
- Caterpillar 914GDocumento28 pagineCaterpillar 914GForomaquinas100% (3)
- Filter DesignDocumento4 pagineFilter Designhassan11783Nessuna valutazione finora
- Introduction To Arduino BoardsDocumento35 pagineIntroduction To Arduino BoardsRohit VarmaNessuna valutazione finora
- False Ceiling Construction Details PDFDocumento2 pagineFalse Ceiling Construction Details PDFAlexis17% (6)
- Guess Questions of Aramco Written Examination For Hse Supervisor / Engineer / OfficerDocumento31 pagineGuess Questions of Aramco Written Examination For Hse Supervisor / Engineer / OfficerAlam Shamsher0% (1)
- Arduino Uno Start Document 5 2022Documento14 pagineArduino Uno Start Document 5 2022Eashvar SrinivasanNessuna valutazione finora
- Arduino LectureDocumento52 pagineArduino LectureSỹ RonNessuna valutazione finora
- Arduino TutorialDocumento26 pagineArduino TutorialsrujanNessuna valutazione finora
- Arduino Handouts and ReviewerDocumento8 pagineArduino Handouts and ReviewerEliane DadoNessuna valutazione finora
- Pull Test Procedure - Chile Cabildo & Villa Seca 3MW-SkyLineDocumento7 paginePull Test Procedure - Chile Cabildo & Villa Seca 3MW-SkyLinecnuneza4Nessuna valutazione finora
- Permeability: The Key to ProductionDocumento30 paginePermeability: The Key to ProductionDarshak Sakhreliya100% (1)
- Arduino Lab2Documento89 pagineArduino Lab2sarvodayasingh100% (1)
- 1 Basic PWM Properties: EAS 199 Basic Pulse Width Modulation Fall 2011 Gerald RecktenwaldDocumento7 pagine1 Basic PWM Properties: EAS 199 Basic Pulse Width Modulation Fall 2011 Gerald RecktenwaldDario ZuluagaNessuna valutazione finora
- Elx 12 Experiment5Documento6 pagineElx 12 Experiment5Queen Marie GalfoNessuna valutazione finora
- lab 1Documento9 paginelab 1Malik YousafNessuna valutazione finora
- PWM ArduinoDocumento10 paginePWM ArduinopepeNessuna valutazione finora
- Microcontroller Basics: Getting Started with ArduinoDocumento26 pagineMicrocontroller Basics: Getting Started with ArduinoNuradinNessuna valutazione finora
- Assignment 3Documento18 pagineAssignment 3Bhakti KalyankastureNessuna valutazione finora
- 02 ArduinoUNODocumento58 pagine02 ArduinoUNOZavorra ZavorratoNessuna valutazione finora
- Lesson 2 CONTROLLING LED BY PULSE WIDTH MODULATIONDocumento2 pagineLesson 2 CONTROLLING LED BY PULSE WIDTH MODULATIONMark Ashley LivedNessuna valutazione finora
- Arduino PWM and Analog Output GuideDocumento29 pagineArduino PWM and Analog Output GuideLê TrungNessuna valutazione finora
- Arduino: BY Salih MahmodDocumento25 pagineArduino: BY Salih MahmodrbenseghierNessuna valutazione finora
- Function and SyntexDocumento8 pagineFunction and SyntexSifatNessuna valutazione finora
- 1253 Iot PRG 1 2 3Documento7 pagine1253 Iot PRG 1 2 3xyz abcNessuna valutazione finora
- Chapter 4: Analog and PWM Output ControlDocumento20 pagineChapter 4: Analog and PWM Output ControlNecNessuna valutazione finora
- ArduinoDocumento34 pagineArduinoLukeNessuna valutazione finora
- Arduino Analog InputDocumento22 pagineArduino Analog Inputmike simsonNessuna valutazione finora
- Introduction To AVR Programming: Applied Electronics (28846) Fall 2014Documento25 pagineIntroduction To AVR Programming: Applied Electronics (28846) Fall 2014Ali DarijaniNessuna valutazione finora
- Arduino IDE Setup & Blinking LEDDocumento6 pagineArduino IDE Setup & Blinking LEDRohit SinghNessuna valutazione finora
- Introduction To Arduino: // Basic Arduino Reference SheetDocumento44 pagineIntroduction To Arduino: // Basic Arduino Reference SheetMOHD RASHIDNessuna valutazione finora
- Automated Display Brightness For MotorcyclesDocumento9 pagineAutomated Display Brightness For Motorcyclesashutosh singhNessuna valutazione finora
- RFID Learning Kit For ArduinoDocumento92 pagineRFID Learning Kit For Arduinoic3_2kNessuna valutazione finora
- 5c Fading Analog WriteDocumento4 pagine5c Fading Analog WriteTran Ngoc Hong Quan (K16HL)Nessuna valutazione finora
- Iarjset-Ncdmete 13Documento48 pagineIarjset-Ncdmete 13Deepak sutarNessuna valutazione finora
- Functions of ArduinoDocumento2 pagineFunctions of ArduinojamillaphilipNessuna valutazione finora
- Arduino - AnalogInOutSerialDocumento4 pagineArduino - AnalogInOutSerialAhmed JafarNessuna valutazione finora
- Electrobot Basic Starter Kit For Arduino UNO R3Documento93 pagineElectrobot Basic Starter Kit For Arduino UNO R3B.srinivasarao100% (1)
- Lab 2 Analog Encoder PWM R9Documento5 pagineLab 2 Analog Encoder PWM R9subairiNessuna valutazione finora
- Arduino DC Motor ControlDocumento4 pagineArduino DC Motor ControlKathryn WorkmanNessuna valutazione finora
- Mbed CH 4 v1Documento15 pagineMbed CH 4 v1Brian YehNessuna valutazione finora
- IJSRDV2I3100Documento10 pagineIJSRDV2I3100Yash KalraNessuna valutazione finora
- Measure Gain of Non-Inverting Amplifier with ArduinoDocumento6 pagineMeasure Gain of Non-Inverting Amplifier with ArduinoRirinNessuna valutazione finora
- 2Ch Relay PDFDocumento7 pagine2Ch Relay PDFkrlos_adrianNessuna valutazione finora
- Assignment: Programming With Arduino and Raspberry PiDocumento26 pagineAssignment: Programming With Arduino and Raspberry PiSUNEESHKUMAR PNessuna valutazione finora
- Name: Raj Prabhakar Kolekar Roll Number: 22338 (F7) Subject: Electronic Skill Development (LAB) Title: Introduction and Application of ArduinoDocumento8 pagineName: Raj Prabhakar Kolekar Roll Number: 22338 (F7) Subject: Electronic Skill Development (LAB) Title: Introduction and Application of ArduinoTusharNessuna valutazione finora
- Reading Material - PWM ControlDocumento5 pagineReading Material - PWM ControlFantasticMeerNessuna valutazione finora
- PWM Control LED Brightness & Motor Speed Using ArduinoDocumento5 paginePWM Control LED Brightness & Motor Speed Using ArduinoNg MeriedNessuna valutazione finora
- Adeept Basic Starter Kit For Arduino UNO R3-V1.0Documento93 pagineAdeept Basic Starter Kit For Arduino UNO R3-V1.0Wilfredo MolinaNessuna valutazione finora
- Lec 1 DIO BasicsDocumento41 pagineLec 1 DIO BasicsRana HeshamNessuna valutazione finora
- Mikrokontroller ArduinorariefDocumento101 pagineMikrokontroller ArduinorariefDio Izqhaq Risky SasongkoNessuna valutazione finora
- Microcontrollers Explained: Components, Programming & ApplicationsDocumento34 pagineMicrocontrollers Explained: Components, Programming & ApplicationsFaridNessuna valutazione finora
- AN0357Documento18 pagineAN0357facebookgerritNessuna valutazione finora
- Light Detection and Measurement: Dr. Eng. Endrowednes KuantamaDocumento20 pagineLight Detection and Measurement: Dr. Eng. Endrowednes KuantamaAman RayNessuna valutazione finora
- StartArduino Course 02 FadeDocumento18 pagineStartArduino Course 02 FadeMr. TNessuna valutazione finora
- ADCDocumento11 pagineADCPraveen SaravananNessuna valutazione finora
- Epictac Lcd1602 Starter Kit 017-117Documento57 pagineEpictac Lcd1602 Starter Kit 017-117grapesNessuna valutazione finora
- ArduinoDocumento2 pagineArduinoYis AlNessuna valutazione finora
- 2016lab2 Guide A1-2 eDocumento27 pagine2016lab2 Guide A1-2 eSarah CosentinoNessuna valutazione finora
- Arduino BootcampDocumento47 pagineArduino Bootcampvinod varmaNessuna valutazione finora
- #1 Blink An LEDDocumento23 pagine#1 Blink An LEDclaire cabatoNessuna valutazione finora
- Mechatronics Boot Camp - May2022Documento60 pagineMechatronics Boot Camp - May2022Maryam MehekNessuna valutazione finora
- ES Unit-4Documento34 pagineES Unit-4palaji pradeepNessuna valutazione finora
- PL ReportDocumento5 paginePL ReportArif KamalNessuna valutazione finora
- Civil 3 8sem PDFDocumento43 pagineCivil 3 8sem PDFG0utham100% (1)
- 01chapter 5-1Documento55 pagine01chapter 5-1AhmNessuna valutazione finora
- ReleDocumento3 pagineRelevitor4santos_6Nessuna valutazione finora
- List of Linkages2016Documento74 pagineList of Linkages2016engrwho0% (1)
- Catálogo King LaiDocumento144 pagineCatálogo King LaiJason Salas FloresNessuna valutazione finora
- How to Operate AAS with SignPal & PhotoPRINTDocumento25 pagineHow to Operate AAS with SignPal & PhotoPRINTLucian DogariuNessuna valutazione finora
- Duet CE-3301 Geotechnical Engineering - IDocumento37 pagineDuet CE-3301 Geotechnical Engineering - IShekh Muhsen Uddin AhmedNessuna valutazione finora
- Memory Map and Address DecodingDocumento9 pagineMemory Map and Address DecodingGhozi AlNessuna valutazione finora
- Ps 1 SolDocumento3 paginePs 1 SolPang XsNessuna valutazione finora
- Smarter and Safer: Cordless Endodontic HandpieceDocumento2 pagineSmarter and Safer: Cordless Endodontic Handpiecesonu1296Nessuna valutazione finora
- Fire Risk AssessmentDocumento13 pagineFire Risk Assessmentteuku zulfikarNessuna valutazione finora
- Struts by Kamalakar DanduDocumento237 pagineStruts by Kamalakar DanduKamalakar DanduNessuna valutazione finora
- Tabla 1 Engine ControlDocumento2 pagineTabla 1 Engine Controljulio montenegroNessuna valutazione finora
- J 1 B 1211 CCDDocumento3 pagineJ 1 B 1211 CCDRegion 51Nessuna valutazione finora
- MIMO Channel CapacityDocumento9 pagineMIMO Channel CapacityGendyNessuna valutazione finora
- Advanced Data Structures and ImplementationDocumento56 pagineAdvanced Data Structures and ImplementationSyam Prasad Reddy BattulaNessuna valutazione finora
- YZ250 Off-Road Bike Parts CatalogDocumento55 pagineYZ250 Off-Road Bike Parts Catalogdwiyanti20Nessuna valutazione finora
- Resume of MD Saiful HyderDocumento4 pagineResume of MD Saiful Hyderimtheboss*Nessuna valutazione finora
- Product Design Recommended Reading ListDocumento3 pagineProduct Design Recommended Reading ListSai Prasath100% (1)
- Microsoft Word - Transistor Models and The Feedback Amp - Docmicrosoft Word - Transistor Models and The Feedback Amp - Doctransistor - Models - and - The - FbaDocumento14 pagineMicrosoft Word - Transistor Models and The Feedback Amp - Docmicrosoft Word - Transistor Models and The Feedback Amp - Doctransistor - Models - and - The - FbashubhamformeNessuna valutazione finora
- Saint Gobain - CertainTeed Roofing ShinglesDocumento14 pagineSaint Gobain - CertainTeed Roofing ShinglesJagriti KashyapNessuna valutazione finora
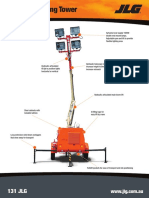
- JLG Lighting Tower 6308AN Series II 20150907Documento2 pagineJLG Lighting Tower 6308AN Series II 20150907DwiSulistyo09Nessuna valutazione finora
- Timing Chain Tensioner ResetDocumento4 pagineTiming Chain Tensioner ResetHybrid RacingNessuna valutazione finora
- Specifications: 3516C - SS Marine PropulsionDocumento5 pagineSpecifications: 3516C - SS Marine PropulsionAidel MustafaNessuna valutazione finora