Potrebbero piacerti anche
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Power Semiconductors Shortform Catalog 2003: An Infineon Technologies CompanyDocumento96 paginePower Semiconductors Shortform Catalog 2003: An Infineon Technologies CompanyAshok PatelNessuna valutazione finora
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Celem TXDocumento2 pagineCelem TXAshok PatelNessuna valutazione finora
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5795)
- enDocumento306 pagineenAshok PatelNessuna valutazione finora
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- 62443en2 PDFDocumento164 pagine62443en2 PDFAshok Patel100% (1)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Handbook of Induction Heating, 2nd Edition: August 2017Documento23 pagineHandbook of Induction Heating, 2nd Edition: August 2017Ashok PatelNessuna valutazione finora
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- J1000 Technical ManualDocumento231 pagineJ1000 Technical ManualAshok PatelNessuna valutazione finora
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Elite 440 India-Oct13 PDFDocumento4 pagineElite 440 India-Oct13 PDFAshok PatelNessuna valutazione finora
- 1kW Smps Project (Based On MicrosiM Design) pg1 1kw Smps Ir2153 PDFDocumento1 pagina1kW Smps Project (Based On MicrosiM Design) pg1 1kw Smps Ir2153 PDFAshok Patel100% (2)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
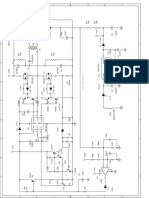
- Power Inverter 3kw SchematicsDocumento1 paginaPower Inverter 3kw SchematicsAshok PatelNessuna valutazione finora
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- AC Drive Altivar 28 Quick Reference Guide PDFDocumento1 paginaAC Drive Altivar 28 Quick Reference Guide PDFAshok PatelNessuna valutazione finora
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- 3 Phase Ac Induction Motor Control With PFC PDFDocumento50 pagine3 Phase Ac Induction Motor Control With PFC PDFAshok PatelNessuna valutazione finora
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- Programmingmanual rv03 PDFDocumento66 pagineProgrammingmanual rv03 PDFAshok PatelNessuna valutazione finora
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- A4915 Demo Board SchematicDocumento7 pagineA4915 Demo Board SchematicAshok PatelNessuna valutazione finora
- BP9833A EN DS Rev.1.2Documento8 pagineBP9833A EN DS Rev.1.2nguyenthucsnterNessuna valutazione finora
- AQU4518R0: Antenna SpecificationsDocumento3 pagineAQU4518R0: Antenna SpecificationsСергей МирошниченкоNessuna valutazione finora
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Catalogsht4 PDFDocumento3 pagineCatalogsht4 PDFtanmayNessuna valutazione finora
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- 12 - Asymmetric Quantum-Well Structures For AlGaNGaNAlGaN Resonant Tunneling Diodes PDFDocumento9 pagine12 - Asymmetric Quantum-Well Structures For AlGaNGaNAlGaN Resonant Tunneling Diodes PDFwanabilaNessuna valutazione finora
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- 6V Solar Battery Charger CircuitDocumento4 pagine6V Solar Battery Charger CircuitAprilian SandiNessuna valutazione finora
- Of 4-Bit Arithmetic Logic UnitsDocumento15 pagineOf 4-Bit Arithmetic Logic UnitsYellasiri SureshNessuna valutazione finora
- Project Presentation On Peltier EffectDocumento14 pagineProject Presentation On Peltier EffectSadiq raduNessuna valutazione finora
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- EEE 3208 Exp-1Documento16 pagineEEE 3208 Exp-1Akash HasanNessuna valutazione finora
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1091)
- Chapter IDocumento14 pagineChapter Iemil feguro100% (1)
- Power Amplifiers Class A, B, C and DDocumento29 paginePower Amplifiers Class A, B, C and DshashiNessuna valutazione finora
- Connector: 2.5mm Pitch/disconnectable Insulation Displacement ConnectorsDocumento2 pagineConnector: 2.5mm Pitch/disconnectable Insulation Displacement ConnectorsEdgarRadaRubasNessuna valutazione finora
- 0802-0613L-Secondary For Info OnlyDocumento1 pagina0802-0613L-Secondary For Info OnlyMansoor JavedNessuna valutazione finora
- JP 2000 Tribander: Owner ManualDocumento13 pagineJP 2000 Tribander: Owner ManualMax KochanoffNessuna valutazione finora
- Draft Spec TL and AC LMLADocumento25 pagineDraft Spec TL and AC LMLAAshwinee KumarNessuna valutazione finora
- Socket StripDocumento3 pagineSocket StripLOI HONessuna valutazione finora
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- TC7117Documento14 pagineTC7117eryNessuna valutazione finora
- 4M4 Gr13E PDFDocumento36 pagine4M4 Gr13E PDFcristian garciaNessuna valutazione finora
- JEST2011 Question PaperDocumento4 pagineJEST2011 Question PaperVidya Sagar100% (6)
- AC To DC ParametersDocumento4 pagineAC To DC ParametersJehnen BaltazarNessuna valutazione finora
- Multistage Amplifiers NotesDocumento3 pagineMultistage Amplifiers Notesashish24294Nessuna valutazione finora
- TR21 Series enDocumento7 pagineTR21 Series enBenjaminNessuna valutazione finora
- Chapter 2 Overview of Power Semiconductor DevicesDocumento16 pagineChapter 2 Overview of Power Semiconductor DevicesKleber PintoNessuna valutazione finora
- Workcentre 5335 SeriesDocumento1.513 pagineWorkcentre 5335 SeriesРома Кузнецов100% (2)
- Witricity-: A Novel Approach To Wireless Power TransferDocumento35 pagineWitricity-: A Novel Approach To Wireless Power TransferRAHUL SIKKANessuna valutazione finora
- ETR+3048 (3000W) Rectifier Module Rev03Documento2 pagineETR+3048 (3000W) Rectifier Module Rev03agus saputraNessuna valutazione finora
- Electronics 07 00062Documento19 pagineElectronics 07 00062sanafayaz12Nessuna valutazione finora
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Solar Class Apr28Documento92 pagineSolar Class Apr28HabogillNessuna valutazione finora
- r48 500 Rectifier Data SheetDocumento2 paginer48 500 Rectifier Data SheetDendy PurnamaNessuna valutazione finora
- Distribution and Substation Transformers For Utility Solar Power Generation FacilitiesDocumento9 pagineDistribution and Substation Transformers For Utility Solar Power Generation FacilitiesJose MustafhaNessuna valutazione finora
- System Components: Separating and Protective InstrumentsDocumento10 pagineSystem Components: Separating and Protective InstrumentsOtavioNessuna valutazione finora
- Sully: The Untold Story Behind the Miracle on the HudsonDa EverandSully: The Untold Story Behind the Miracle on the HudsonValutazione: 4 su 5 stelle4/5 (103)