Potrebbero piacerti anche
- Antecedentes PDFDocumento1 paginaAntecedentes PDFHectorRiandeNessuna valutazione finora
- Antecedentes PDFDocumento1 paginaAntecedentes PDFHectorRiandeNessuna valutazione finora
- Antecedentes PDFDocumento1 paginaAntecedentes PDFHectorRiandeNessuna valutazione finora
- E70 9114Documento26 pagineE70 9114HectorRiandeNessuna valutazione finora
- Instalaciones Hidraulicas Sanitarias y D PDFDocumento106 pagineInstalaciones Hidraulicas Sanitarias y D PDFBethito Pinto HernandezNessuna valutazione finora
- IntroducciónDocumento1 paginaIntroducciónHectorRiandeNessuna valutazione finora
- SensoresDocumento9 pagineSensoresHectorRiandeNessuna valutazione finora
- Galga ExtensiométricaDocumento9 pagineGalga ExtensiométricaHectorRiandeNessuna valutazione finora
- Experiencia No 5Documento5 pagineExperiencia No 5HectorRiandeNessuna valutazione finora
- Decreto 323 SaludDocumento17 pagineDecreto 323 SaludJB SamudioNessuna valutazione finora
- P4Documento1 paginaP4HectorRiandeNessuna valutazione finora
- TrifasicoDocumento4 pagineTrifasicoHectorRiandeNessuna valutazione finora
- Galga ExtensiométricaDocumento9 pagineGalga ExtensiométricaHectorRiandeNessuna valutazione finora
- Comentario Problema #3Documento1 paginaComentario Problema #3HectorRiandeNessuna valutazione finora
- Problema 2Documento2 pagineProblema 2HectorRiandeNessuna valutazione finora
- Problema 3, Parcial 1Documento6 pagineProblema 3, Parcial 1HectorRiandeNessuna valutazione finora
- CitaDocumento1 paginaCitaHectorRiandeNessuna valutazione finora
- SensoresDocumento9 pagineSensoresHectorRiandeNessuna valutazione finora
- Problema 3, Parcial 1Documento6 pagineProblema 3, Parcial 1HectorRiandeNessuna valutazione finora
- IntroducciónDocumento1 paginaIntroducciónHectorRiandeNessuna valutazione finora
- CuestionarioDocumento2 pagineCuestionarioHectorRiandeNessuna valutazione finora
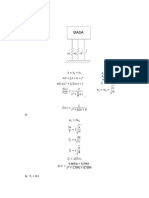
- Desarrolle Un Modelo Matemático para El Sistema MasaDocumento1 paginaDesarrolle Un Modelo Matemático para El Sistema MasaHectorRiandeNessuna valutazione finora
- PrototipoDocumento1 paginaPrototipoHectorRiandeNessuna valutazione finora
- PresentacionDocumento1 paginaPresentacionHectorRiandeNessuna valutazione finora
- Nomenclatura y Rotulación de LTXDocumento18 pagineNomenclatura y Rotulación de LTXFernando Arévalo RiveraNessuna valutazione finora
- Mi Parte - Dinamica AplicadaDocumento3 pagineMi Parte - Dinamica AplicadaHectorRiandeNessuna valutazione finora
- CN Con ImagenDocumento1 paginaCN Con ImagenHectorRiandeNessuna valutazione finora
- BienesDocumento1 paginaBienesHectorRiandeNessuna valutazione finora
- Tamaño de tubería para sistema de aspersión de césped golf 0,5ft3/s 60psigDocumento1 paginaTamaño de tubería para sistema de aspersión de césped golf 0,5ft3/s 60psigHectorRiandeNessuna valutazione finora
- GeneradoresDocumento3 pagineGeneradoresHectorRiandeNessuna valutazione finora
- Sedimentary StructuresDocumento42 pagineSedimentary Structuresluis_1024Nessuna valutazione finora
- Medir resistencias de devanados de transformadorDocumento21 pagineMedir resistencias de devanados de transformadorMarco Antonio Chahuayo GarciaNessuna valutazione finora
- Gas IdealDocumento10 pagineGas IdealAlejandra ChacónNessuna valutazione finora
- Emotron m20 Data Sheet 01-4134-04 EsDocumento8 pagineEmotron m20 Data Sheet 01-4134-04 EsSergio MorenoNessuna valutazione finora
- Cesar QuimicaDocumento3 pagineCesar QuimicaKaren CalvaNessuna valutazione finora
- Anteproyecto Conservacion de La Energia - Motor StirlingDocumento17 pagineAnteproyecto Conservacion de La Energia - Motor StirlingchajasitioNessuna valutazione finora
- Camion Meniro PONENCIA Jaime OlivaresDocumento73 pagineCamion Meniro PONENCIA Jaime OlivaresSandro Cuti Taipe75% (4)
- BrujulaDocumento8 pagineBrujulaJalil Varela ManjarresNessuna valutazione finora
- Hoja 3 ResueltaDocumento3 pagineHoja 3 ResueltaRodri Jiménez PedrajasNessuna valutazione finora
- CatalogoDocumento51 pagineCatalogoAlejandro ChinchillaNessuna valutazione finora
- LISTA DE SÍMBOLOS ElectricosDocumento7 pagineLISTA DE SÍMBOLOS Electricosarq_gallegos_toledoNessuna valutazione finora
- Pasaje Vocal, Registros, Cobertura y ApoyoDocumento2 paginePasaje Vocal, Registros, Cobertura y ApoyoMauricio Cortes100% (1)
- 7.0 Dinamica Estructural PDFDocumento119 pagine7.0 Dinamica Estructural PDFFerney ForeroNessuna valutazione finora
- Iniciacion A La QuimicaDocumento422 pagineIniciacion A La QuimicaRosa Navarro CameoNessuna valutazione finora
- Física I Álgebra de VectoresDocumento19 pagineFísica I Álgebra de VectoresDavidNessuna valutazione finora
- Proyecto Final ProgramacionDocumento20 pagineProyecto Final ProgramacionJose LarreaNessuna valutazione finora
- Envejecimiento Del AsfaltoDocumento6 pagineEnvejecimiento Del AsfaltoRoger Sanchez MatosNessuna valutazione finora
- Prueba C-1 Química (Configuración Electrónica)Documento3 paginePrueba C-1 Química (Configuración Electrónica)PamelaNessuna valutazione finora
- Metalurgia en Polvos 01Documento16 pagineMetalurgia en Polvos 01OdiseoRomaNessuna valutazione finora
- Guia4 EjerciciosDocumento5 pagineGuia4 EjerciciosCR CrNessuna valutazione finora
- Presentacion Tema 3 ICT The McGraw-HillDocumento30 paginePresentacion Tema 3 ICT The McGraw-HillFranchu NG100% (1)
- Evaluacion de Fisica IDocumento2 pagineEvaluacion de Fisica IRaul Yanza ZambranoNessuna valutazione finora
- Diseño y comportamiento de contraventeos excéntricosDocumento7 pagineDiseño y comportamiento de contraventeos excéntricosBelen MolinaNessuna valutazione finora
- Caracteristicas TermomecanicasDocumento19 pagineCaracteristicas TermomecanicasJosePsdNessuna valutazione finora
- PRACTICAN°2 LaboratorioDocumento10 paginePRACTICAN°2 LaboratorioBismarck Sernaque CordovaNessuna valutazione finora
- Aplicaciones de La Integral MultipleDocumento6 pagineAplicaciones de La Integral MultipleMónica Margareth HTNessuna valutazione finora
- Problemas de CinemáticaDocumento3 pagineProblemas de CinemáticaAlejandra Jamilet Sarmiento Limo100% (1)
- Interruptores Automaticos Con SF6 para GeneradoresDocumento8 pagineInterruptores Automaticos Con SF6 para GeneradoresFélix Martínez FernándezNessuna valutazione finora
- 7-Resumen Transmisión HVDCDocumento15 pagine7-Resumen Transmisión HVDCRoberto SantamariaNessuna valutazione finora
- Conceptos de OrdenDocumento14 pagineConceptos de OrdenIvanna HcNessuna valutazione finora