Potrebbero piacerti anche
- Owards Large-Area On-Body Force Sensing Using Soft, Flexible Materials: Challenges of Textile-Based Array SensingDocumento13 pagineOwards Large-Area On-Body Force Sensing Using Soft, Flexible Materials: Challenges of Textile-Based Array SensingANessuna valutazione finora
- Motor-Less and Gear-Less Robots: New Technologies For Service and Personal RobotsDocumento8 pagineMotor-Less and Gear-Less Robots: New Technologies For Service and Personal RobotsANessuna valutazione finora
- Motor-Less and Gear-Less Robots: New Technologies For Service and Personal RobotsDocumento8 pagineMotor-Less and Gear-Less Robots: New Technologies For Service and Personal RobotsANessuna valutazione finora
- Predicting CT Image From MRI Data Through Feature Matching With Learned Nonlinear Local DescriptorsDocumento11 paginePredicting CT Image From MRI Data Through Feature Matching With Learned Nonlinear Local DescriptorsANessuna valutazione finora
- Use of Friends' Series in Teaching English On B2 Level: Lenka KohútováDocumento69 pagineUse of Friends' Series in Teaching English On B2 Level: Lenka KohútováANessuna valutazione finora
- Control Linear SystemsDocumento160 pagineControl Linear SystemsANessuna valutazione finora
- N Atmel 7766 8 Bit AVR ATmega16U4 32U4 DatasheetDocumento438 pagineN Atmel 7766 8 Bit AVR ATmega16U4 32U4 DatasheetAmri FauzanNessuna valutazione finora
- InTech-Modeling and Assessing of Omni Directional Robots With Three and Four WheelsDocumento24 pagineInTech-Modeling and Assessing of Omni Directional Robots With Three and Four WheelsAmr Ahmed FaridNessuna valutazione finora
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (890)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- ProjectDocumento5 pagineProjectMahi MalikNessuna valutazione finora
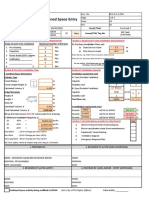
- Ventilation Plan For Confined Space EntryDocumento9 pagineVentilation Plan For Confined Space EntryMohamad Nazmi Mohamad Rafian100% (1)
- Research Associate in The DFG Graduate Program - Collective Decision-Making - (12 Positions) - 28 Subsection 3 HMBHGDocumento3 pagineResearch Associate in The DFG Graduate Program - Collective Decision-Making - (12 Positions) - 28 Subsection 3 HMBHGFiya ShahNessuna valutazione finora
- ĐỀ CƯƠNG ÔN TẬP HỌC KÌ 1-LỚP 12Documento15 pagineĐỀ CƯƠNG ÔN TẬP HỌC KÌ 1-LỚP 12Anh Duc VuNessuna valutazione finora
- 10 - The Geological Interpretation of Well LogsDocumento292 pagine10 - The Geological Interpretation of Well LogsLorenza LorenzanaNessuna valutazione finora
- OhmDocumento15 pagineOhmRhonnel Manatad Alburo88% (17)
- Design Prof BlankoDocumento11 pagineDesign Prof BlankoAousten AAtenNessuna valutazione finora
- Curios AllianceDocumento32 pagineCurios AllianceyesterowNessuna valutazione finora
- 03 - Gherkin An OverviewDocumento19 pagine03 - Gherkin An OverviewArunkumar KrishnamoorthyNessuna valutazione finora
- HydrodynamicsDocumento122 pagineHydrodynamicsIustin Cristian100% (2)
- Modern Machine Shop 262180-MAR 2014Documento228 pagineModern Machine Shop 262180-MAR 20141mmahoneyNessuna valutazione finora
- Wellmark Series 2600 PDFDocumento6 pagineWellmark Series 2600 PDFHomar Hernández JuncoNessuna valutazione finora
- Adv - Student - HandbookDocumento61 pagineAdv - Student - HandbookOmkar BezzankiNessuna valutazione finora
- Annexure - Subject Wise IBDP Grade BoundariesDocumento4 pagineAnnexure - Subject Wise IBDP Grade BoundariesazeemNessuna valutazione finora
- IEC 60793-1-30-2001 Fibre Proof TestDocumento12 pagineIEC 60793-1-30-2001 Fibre Proof TestAlfian Firdaus DarmawanNessuna valutazione finora
- Industrial Visit Report - 08 09 2018Documento11 pagineIndustrial Visit Report - 08 09 2018HARIKRISHNA MNessuna valutazione finora
- Flutter Layout Cheat SheetDocumento11 pagineFlutter Layout Cheat SheetJarrett Yew0% (1)
- "Smart Attendance Using F Ttendance Management Using Face Recognition" Anagement SystemDocumento13 pagine"Smart Attendance Using F Ttendance Management Using Face Recognition" Anagement Systemamer HNessuna valutazione finora
- HP t410 Smart Zero Client: Zero Management. Zero Configuration. Zero CompromiseDocumento5 pagineHP t410 Smart Zero Client: Zero Management. Zero Configuration. Zero Compromisekonan09Nessuna valutazione finora
- Maths ReportDocumento3 pagineMaths ReportShishir BogatiNessuna valutazione finora
- Duplichecker Plagiarism Report 3Documento3 pagineDuplichecker Plagiarism Report 3Mushfiqur RahmanNessuna valutazione finora
- BS EN 50131-1998 Alarm Systems Intrusion Systems Part 6Documento30 pagineBS EN 50131-1998 Alarm Systems Intrusion Systems Part 6Michael Camit EsoNessuna valutazione finora
- The Reference Frame - Nice Try But I Am Now 99% Confident That Atiyah's Proof of RH Is Wrong, HopelessDocumento5 pagineThe Reference Frame - Nice Try But I Am Now 99% Confident That Atiyah's Proof of RH Is Wrong, Hopelesssurjit4123Nessuna valutazione finora
- IGNOU FEG-02 (2011) AssignmentDocumento4 pagineIGNOU FEG-02 (2011) AssignmentSyed AhmadNessuna valutazione finora
- Rosalind FranklinDocumento1 paginaRosalind FranklinMichael SmithNessuna valutazione finora
- Flaechendicht k435 de 0216 0 Eng ScreenDocumento2 pagineFlaechendicht k435 de 0216 0 Eng ScreenAlexandru IonescuNessuna valutazione finora
- Anthony Robbins With Harvard Business SchoolDocumento3 pagineAnthony Robbins With Harvard Business SchoolluffylovemangaNessuna valutazione finora
- Book 3: The SiphonophoresDocumento29 pagineBook 3: The SiphonophoresRaquel SilvaNessuna valutazione finora
- Power and Energy Meters: Model No. Remarks Sl. WH WH W Va Var 1. ET3021 ET4021Documento1 paginaPower and Energy Meters: Model No. Remarks Sl. WH WH W Va Var 1. ET3021 ET4021Ram KumarNessuna valutazione finora
- Final Exam - Movie Analysis of Respeto - Sec90 - K. Dela CruzDocumento9 pagineFinal Exam - Movie Analysis of Respeto - Sec90 - K. Dela CruzKylie Dela CruzNessuna valutazione finora