Potrebbero piacerti anche
- Introducción A Los Circuitos ElectroneumáticosDocumento15 pagineIntroducción A Los Circuitos ElectroneumáticosJorge Salazar AlcarazNessuna valutazione finora
- Estampadora NeumaticaDocumento24 pagineEstampadora NeumaticaSaith Julcarima Rosales50% (6)
- Ventajas ElectroneumaticaDocumento2 pagineVentajas ElectroneumaticaDeisy Guanochanga40% (5)
- Circuito Electroneumático de Maquina EstampadoraDocumento4 pagineCircuito Electroneumático de Maquina EstampadoraJass HernándezNessuna valutazione finora
- Problemas de Automatizacion Relacionados Con ElectroneumaticaDocumento6 pagineProblemas de Automatizacion Relacionados Con Electroneumaticarcarlospj100% (2)
- Que Es La ElectroneumáticaDocumento6 pagineQue Es La ElectroneumáticaWaldo Eber Melendez Garro50% (4)
- ProblemasDocumento77 pagineProblemasjonathan41110100% (1)
- Proyecto - Dobladora de LaminasDocumento14 pagineProyecto - Dobladora de LaminasChurosLocos50% (2)
- Metodo Secuenciador - ElectroneumaticaDocumento18 pagineMetodo Secuenciador - ElectroneumaticaJuan Abel FríasNessuna valutazione finora
- Características de Los Medidores AnalógicosDocumento2 pagineCaracterísticas de Los Medidores AnalógicosXavier CarpioNessuna valutazione finora
- Desarrollo de Circuitos Electroneumaticos PDFDocumento14 pagineDesarrollo de Circuitos Electroneumaticos PDFAnonymous eJgQMUEk5A75% (4)
- Categorias de ContactoresDocumento2 pagineCategorias de ContactoresSara100% (4)
- Metodo Cascada NeumaticaDocumento18 pagineMetodo Cascada NeumaticaHoward Palomino AhumadaNessuna valutazione finora
- Problemas Resueltos de NeumáticaDocumento32 pagineProblemas Resueltos de NeumáticaJonathan Vera83% (18)
- Mando Directo e Indirecto de Un Cilindro Simple y Doble EfectoDocumento25 pagineMando Directo e Indirecto de Un Cilindro Simple y Doble EfectoYen FisherNessuna valutazione finora
- Aplicacion de La Electroneumatica PDFDocumento13 pagineAplicacion de La Electroneumatica PDFmanuelwilliam100% (12)
- Practica AutomatizacionDocumento17 paginePractica AutomatizacionMaikol Quintero100% (1)
- Temporizador ElectroneumáticoDocumento5 pagineTemporizador ElectroneumáticoGeral'd FSNessuna valutazione finora
- Electroneumatica BasicaDocumento21 pagineElectroneumatica Basicameinlebengott90% (21)
- Informe 7.cilindro Doble Efecto Pilotaje Neumatico-1Documento9 pagineInforme 7.cilindro Doble Efecto Pilotaje Neumatico-1Angel NuñezNessuna valutazione finora
- 10 Ejemplos de Aplicaciones NeumaticasDocumento11 pagine10 Ejemplos de Aplicaciones NeumaticasJuan OrtizNessuna valutazione finora
- Historia Del Torno CNCDocumento2 pagineHistoria Del Torno CNCrafaelechuga60% (5)
- Automatización Neumática PuraDocumento52 pagineAutomatización Neumática PuraMAURICIO100% (1)
- Metodos - Intuitivo, Cascada, Paso A Paso, ElectroneumaticaDocumento34 pagineMetodos - Intuitivo, Cascada, Paso A Paso, Electroneumaticaisobaric100073% (11)
- Metodo IntuitivoDocumento37 pagineMetodo IntuitivoYulieth PinzonNessuna valutazione finora
- Problemas Método Cascada en ElectroneumáticaDocumento3 pagineProblemas Método Cascada en Electroneumáticaborjander100% (5)
- Explicación de Problemas de Circuitos NeumáticosDocumento2 pagineExplicación de Problemas de Circuitos Neumáticosgeorgey_jungle100% (4)
- Electroneumatica y ElectrohidraulicaDocumento17 pagineElectroneumatica y ElectrohidraulicaRicardo Hernandez0% (2)
- Ejercicios UT6 ResueltosDocumento43 pagineEjercicios UT6 ResueltosJulián Aranda100% (1)
- Ejercicios ElectroneumaticaDocumento48 pagineEjercicios ElectroneumaticaJUAN GOMEZ LOREDO100% (3)
- Circuitos Neumáticos Método de La CascadaDocumento5 pagineCircuitos Neumáticos Método de La Cascadaserolfitnas100% (2)
- Partes Del Torno CNCDocumento3 paginePartes Del Torno CNCrafaelechuga81% (16)
- Conclusion EsDocumento1 paginaConclusion EsllangoNessuna valutazione finora
- Neumatica ConclusionesDocumento1 paginaNeumatica ConclusionesCarlos Mercado50% (2)
- Cómo Funciona Un Contador EléctricoDocumento14 pagineCómo Funciona Un Contador Eléctricoafloreso145Nessuna valutazione finora
- Compresores de ÉmboloDocumento6 pagineCompresores de ÉmboloMarcoNessuna valutazione finora
- Mando Directo de Un Cilindro de Simple EfectoDocumento9 pagineMando Directo de Un Cilindro de Simple Efectojohan221150% (4)
- Amef A Un Taladro Tipo ColumnaDocumento28 pagineAmef A Un Taladro Tipo ColumnaJose Luis Diaz67% (3)
- Electro HidRauliCADocumento19 pagineElectro HidRauliCAAlfonso Meza0% (1)
- Arranque Directo Con Inversión de GiroDocumento7 pagineArranque Directo Con Inversión de GiroJosimar Iturria Quispe50% (2)
- Ejercicio ElectroneumáticaDocumento5 pagineEjercicio ElectroneumáticaJulio Cesar100% (1)
- Valvulas ElectroneumaticasDocumento14 pagineValvulas ElectroneumaticasRosey EscalonaNessuna valutazione finora
- Método SecuenciadorDocumento15 pagineMétodo SecuenciadorValeria Camila100% (1)
- LogixPro - SiloDocumento2 pagineLogixPro - Silogamh13100% (3)
- Aplicaciones Electroneumáticas y Electrohidráulicas: ¿Qué Es La Electroneumática?Documento3 pagineAplicaciones Electroneumáticas y Electrohidráulicas: ¿Qué Es La Electroneumática?Said de LeónNessuna valutazione finora
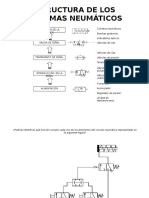
- Estructura de Sistemas NeumaticosDocumento22 pagineEstructura de Sistemas NeumaticosMarceloNessuna valutazione finora
- 3.4 Documentación de Circuitos Combinados y SecuencialesDocumento9 pagine3.4 Documentación de Circuitos Combinados y SecuencialesJorgeNessuna valutazione finora
- Ejercicios Neumatica y ElectroneumaticaDocumento33 pagineEjercicios Neumatica y Electroneumaticasernaiza92% (13)
- Diagrama Espacio FaseDocumento2 pagineDiagrama Espacio Faseoscar80% (5)
- E Stamp AdoraDocumento7 pagineE Stamp AdoraTolyKuperHuisaFernandez100% (1)
- Sistemas de Control - Lazo Abierto - Lazo CerradoDocumento8 pagineSistemas de Control - Lazo Abierto - Lazo CerradoHiramSanchezHardyNessuna valutazione finora
- Electroneumática y ElectrohidraulicaDocumento51 pagineElectroneumática y ElectrohidraulicaHeber Huallpa100% (1)
- Temario para Sistemas de Mandos Neumaticos e HidraulicosDocumento26 pagineTemario para Sistemas de Mandos Neumaticos e HidraulicosMichael Mendigure PumacharaNessuna valutazione finora
- EVALUACIONDocumento7 pagineEVALUACIONanon_347879477Nessuna valutazione finora
- Electroneumatica AvanzadaDocumento4 pagineElectroneumatica AvanzadaBrayan VivasNessuna valutazione finora
- Ejercicios Ladder 2018Documento15 pagineEjercicios Ladder 2018Leobardo M. García Cruz50% (2)
- Automatización Industrial Actuadores Parte 2Documento14 pagineAutomatización Industrial Actuadores Parte 2Cristian CruzadoNessuna valutazione finora
- Electroneumatica Lab 00Documento15 pagineElectroneumatica Lab 00mirzavegatapiaNessuna valutazione finora
- Informe Nº5 - Electroneumatica Cilindro ADocumento8 pagineInforme Nº5 - Electroneumatica Cilindro AMiguel ZP100% (1)
- Ejercicios de PLCDocumento25 pagineEjercicios de PLCCarolina Solis0% (2)
- Taller 1Documento8 pagineTaller 1Nelson Peña0% (1)
- Documento PDFDocumento19 pagineDocumento PDFLeslie RamirezNessuna valutazione finora
- Instalaciones NeumaticasDocumento117 pagineInstalaciones NeumaticasJulio SantosNessuna valutazione finora
- Minuta de Constitución de Sociedad Anonima CerradaDocumento13 pagineMinuta de Constitución de Sociedad Anonima CerradaJesse Gomez94% (17)
- Perforadoras Manuales y JumbosDocumento65 paginePerforadoras Manuales y JumbosLuis Miguel Polo Simon100% (3)
- EVA1 - 290NH05 - VF Actividad EVA1 Neumatica IPCHileDocumento8 pagineEVA1 - 290NH05 - VF Actividad EVA1 Neumatica IPCHilerfuentealbachNessuna valutazione finora
- Valvula de SimultaneidadDocumento5 pagineValvula de SimultaneidadAlan Martinez RamirezNessuna valutazione finora
- Apm PDFDocumento22 pagineApm PDFAnonymous vBTrgetsY1100% (9)
- Evaluacion N° 1 de Sistemas ElectrohidraulicosDocumento4 pagineEvaluacion N° 1 de Sistemas ElectrohidraulicosCrisstian AravenaNessuna valutazione finora
- Counter FestoDocumento2 pagineCounter FestoSombrero e SaoNessuna valutazione finora
- Tuberias Neumaticas y Racores PDFDocumento21 pagineTuberias Neumaticas y Racores PDFManuel José Quinteros RodríguezNessuna valutazione finora
- Unidad Ii-3Documento21 pagineUnidad Ii-3Efrenn GómezNessuna valutazione finora
- Tercer Informe - Neumatica y ElectroneumaticaDocumento24 pagineTercer Informe - Neumatica y Electroneumaticajuan carlos acuña bartoloNessuna valutazione finora
- Ejercicios ElectroneumaticaDocumento29 pagineEjercicios ElectroneumaticaAlejandro LIzarazo VargasNessuna valutazione finora
- Trabajo MontacargasDocumento28 pagineTrabajo MontacargasRichard CarvajalNessuna valutazione finora
- Simbologia NeumaticaDocumento5 pagineSimbologia NeumaticaJuan Diego Maita100% (2)
- T10 Introduccion NeuDocumento16 pagineT10 Introduccion NeuHugo CedeñoNessuna valutazione finora
- Informe de Laboratorio - Automatización IiDocumento12 pagineInforme de Laboratorio - Automatización Iigloria tabaresNessuna valutazione finora
- Clemco EspañolDocumento8 pagineClemco EspañolSmith Jonhatan Moya Carbajal100% (1)
- Norma Oficial Mexicana Válvulas de TormentaDocumento0 pagineNorma Oficial Mexicana Válvulas de Tormentagonzalezsgj100% (1)
- Sistema de Seguridad de Superficie VssDocumento15 pagineSistema de Seguridad de Superficie VssJosé Neuquen100% (5)
- Suspension NeumaticaDocumento10 pagineSuspension NeumaticaIlse SaavedraNessuna valutazione finora
- Conceptos de NeumaticaDocumento11 pagineConceptos de NeumaticaIngeniero BolMoNessuna valutazione finora
- Aplicación de Neumática Con VacíoDocumento4 pagineAplicación de Neumática Con VacíoHenry Manuel Paredes AlvaradoNessuna valutazione finora
- 19 Ejercicio Analizado NeumàticaDocumento7 pagine19 Ejercicio Analizado NeumàticaMartin FranciscoNessuna valutazione finora
- Crucigrama de Neumatica e HidraulicaDocumento2 pagineCrucigrama de Neumatica e HidraulicaMartin Ruiz SarmientoNessuna valutazione finora
- Ventajas y Desventajas Tipos de EnergiaDocumento4 pagineVentajas y Desventajas Tipos de EnergiaEddy TixNessuna valutazione finora
- Sistemas ElectroneumaticosDocumento6 pagineSistemas ElectroneumaticosDiana Carolina Alarcon MoronNessuna valutazione finora
- Precomisionamiento, Comisionamiento Y Puesta en Marcha Proyecto: Nueva AceríaDocumento47 paginePrecomisionamiento, Comisionamiento Y Puesta en Marcha Proyecto: Nueva AceríaAlvaro Antonio Zapata BernardoNessuna valutazione finora
- Unidad 4 Subtemas 4.1 y 4.2Documento24 pagineUnidad 4 Subtemas 4.1 y 4.2Jesus AguilarNessuna valutazione finora