Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- BMC Remedy IT Service Management: Concepts GuideDocumento204 pagineBMC Remedy IT Service Management: Concepts GuideP Venu Gopala RaoNessuna valutazione finora
- Sales Tax Management SystemDocumento3 pagineSales Tax Management SystemGracia StephenNessuna valutazione finora
- Retail Technology ServicesDocumento2 pagineRetail Technology ServicesGracia StephenNessuna valutazione finora
- SAP All in One ImplementationDocumento3 pagineSAP All in One ImplementationGracia StephenNessuna valutazione finora
- SampleCV (Resume)Documento2 pagineSampleCV (Resume)pruebaNessuna valutazione finora
- Tips To Lighten Dark ButtDocumento5 pagineTips To Lighten Dark ButtGracia StephenNessuna valutazione finora
- SAP GTS Sample Resume 2Documento3 pagineSAP GTS Sample Resume 2suraj64778100% (2)
- South GardenDocumento2 pagineSouth GardenGracia StephenNessuna valutazione finora
- Herearethe 16 PricingelementsinpricingprocedureanddescriptionforeachDocumento6 pagineHerearethe 16 PricingelementsinpricingprocedureanddescriptionforeachGracia StephenNessuna valutazione finora
- Arun - Katalyst Admin Updated ResumeDocumento2 pagineArun - Katalyst Admin Updated ResumeGracia StephenNessuna valutazione finora
- Configure Material TypeDocumento10 pagineConfigure Material TypeCherukur SathyaNessuna valutazione finora
- Savoye - Karapakkam 2 BHK Availabe ListDocumento1 paginaSavoye - Karapakkam 2 BHK Availabe ListGracia StephenNessuna valutazione finora
- Reference Senthilkumar ResumeDocumento4 pagineReference Senthilkumar ResumeGracia StephenNessuna valutazione finora
- Stock Transfer Configure DocumentDocumento7 pagineStock Transfer Configure DocumentSatyendra Gupta100% (1)
- Transport Management SystemDocumento39 pagineTransport Management SystemGracia StephenNessuna valutazione finora
- BW Hana ContentDocumento2 pagineBW Hana ContentGracia StephenNessuna valutazione finora
- Insurance Premium For Dependents - Age SlabsDocumento1 paginaInsurance Premium For Dependents - Age SlabsGracia StephenNessuna valutazione finora
- Herearethe 16 PricingelementsinpricingprocedureanddescriptionforeachDocumento6 pagineHerearethe 16 PricingelementsinpricingprocedureanddescriptionforeachGracia StephenNessuna valutazione finora
- Project Engineer ResponsibsilitiDocumento1 paginaProject Engineer ResponsibsilitiGracia StephenNessuna valutazione finora
- A Step-By-Step Guide On IDoc-ALE Between Two SAP ServersDocumento22 pagineA Step-By-Step Guide On IDoc-ALE Between Two SAP ServersRavindra Chowdary Gokina100% (1)
- MM Tables (Tcode SE11 or SE16)Documento2 pagineMM Tables (Tcode SE11 or SE16)Gracia StephenNessuna valutazione finora
- Herearethe 16 PricingelementsinpricingprocedureanddescriptionforeachDocumento6 pagineHerearethe 16 PricingelementsinpricingprocedureanddescriptionforeachGracia StephenNessuna valutazione finora
- SAP-MM-RealTime Problems & Solutions - Part1Documento53 pagineSAP-MM-RealTime Problems & Solutions - Part1sbhanuprathap86% (88)
- Sap Solman TutorialDocumento78 pagineSap Solman TutorialAshish Agarwal100% (1)
- ME6703-Computer Integrated Manufacturing SystemsDocumento11 pagineME6703-Computer Integrated Manufacturing SystemsGracia StephenNessuna valutazione finora
- CE6451-Fluid Mechanics and MachineryDocumento13 pagineCE6451-Fluid Mechanics and MachineryGracia StephenNessuna valutazione finora
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Dynamic Models of Wind Turbines Thesis PerdanaDocumento211 pagineDynamic Models of Wind Turbines Thesis PerdanalijiexautNessuna valutazione finora
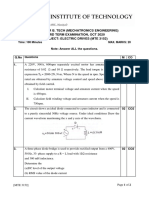
- Mte 3152 Electric Drives Mid TermDocumento2 pagineMte 3152 Electric Drives Mid TermAjitash TrivediNessuna valutazione finora
- Mock Test - 15 QuestionsDocumento10 pagineMock Test - 15 QuestionsrajkumarthatiNessuna valutazione finora
- Electrical Drives MCQDocumento7 pagineElectrical Drives MCQSaber AbdelaalNessuna valutazione finora
- Hybrid System Overview: Section 1Documento150 pagineHybrid System Overview: Section 1Cacanaut100% (1)
- Model Development and Validation of Brushless ExcitersDocumento8 pagineModel Development and Validation of Brushless ExcitersAmberMeerabNessuna valutazione finora
- Em2 Quiz With AnswerDocumento13 pagineEm2 Quiz With Answerkarthi100% (1)
- Wind Energy Research PaperDocumento4 pagineWind Energy Research PaperKumail Hasan NaqviNessuna valutazione finora
- AlternatorDocumento20 pagineAlternatortusarNessuna valutazione finora
- AVR ManualDocumento29 pagineAVR ManualgarridtNessuna valutazione finora
- CG Power and Industrial Solutions Limited: LT Motors Division AhmednagarDocumento1 paginaCG Power and Industrial Solutions Limited: LT Motors Division AhmednagarMohan BabuNessuna valutazione finora
- Unit 5 - 8 PDFDocumento73 pagineUnit 5 - 8 PDFEmar OreaNessuna valutazione finora
- Et 316Documento30 pagineEt 316Ali IhtshamNessuna valutazione finora
- PLCDocumento58 paginePLCR.Deepak KannaNessuna valutazione finora
- Data Sheet-DG Set - Rev 0Documento6 pagineData Sheet-DG Set - Rev 0jhakg_169712275Nessuna valutazione finora
- DT 6000Documento18 pagineDT 6000Mahmood EijazNessuna valutazione finora
- Design and Simulation of Speed Control of Three Phase Induction Motor Using Power Electronics ConverterDocumento52 pagineDesign and Simulation of Speed Control of Three Phase Induction Motor Using Power Electronics Converterzelalem wegayehu100% (1)
- Theory and Optimum Design of PM VernierDocumento5 pagineTheory and Optimum Design of PM VernierAndrewNessuna valutazione finora
- MachinesDocumento2 pagineMachinesShreyas YewaleNessuna valutazione finora
- SVPWM For BLDCPDF PDFDocumento54 pagineSVPWM For BLDCPDF PDFfokeraNessuna valutazione finora
- Sketch ThriDocumento35 pagineSketch ThrisahilNessuna valutazione finora
- BLDC Motor Operation Control PDFDocumento46 pagineBLDC Motor Operation Control PDFYahya MohammadNessuna valutazione finora
- Docslide - Us Variable Frequency TransformerDocumento20 pagineDocslide - Us Variable Frequency TransformerSuhail Ahmad SuhailNessuna valutazione finora
- 3e-5 Rudder Angle IndicatorDocumento32 pagine3e-5 Rudder Angle Indicatorkedar444444Nessuna valutazione finora
- Basic BLDC ControllerDocumento9 pagineBasic BLDC ControllerRen KiyoshiiNessuna valutazione finora
- MV Motors MachinesDocumento42 pagineMV Motors MachinesHuma JavedNessuna valutazione finora
- IECEx BAS 10.0045X 004Documento6 pagineIECEx BAS 10.0045X 004ESTEBAN DUARTE VIDESNessuna valutazione finora
- Final YearDocumento51 pagineFinal YearAnand Kumar0% (1)
- Corrente em MancalDocumento146 pagineCorrente em MancalEdsonTomaselliNessuna valutazione finora
- Water PumpsDocumento119 pagineWater PumpsLesly LeslyNessuna valutazione finora