Potrebbero piacerti anche
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- 132kv KURNOOLDocumento2 pagine132kv KURNOOLRama KrishnaNessuna valutazione finora
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Maps/Excel Sheets/400kv SSDocumento1 paginaMaps/Excel Sheets/400kv SSRama KrishnaNessuna valutazione finora
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Fileupload 210412 8429Documento5 pagineFileupload 210412 8429Rama KrishnaNessuna valutazione finora
- Name of The Former RS - No Location Number Name of The Tree Girth Hight 1 Chelikani Kishore Kumar 217-1A-2 117/0 TeakDocumento9 pagineName of The Former RS - No Location Number Name of The Tree Girth Hight 1 Chelikani Kishore Kumar 217-1A-2 117/0 TeakRama KrishnaNessuna valutazione finora
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Chapter - 3 Multi Level Inverters 3.1 InverterDocumento8 pagineChapter - 3 Multi Level Inverters 3.1 InverterRama KrishnaNessuna valutazione finora
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- General Consumer: Sand Transaction ReceiptDocumento1 paginaGeneral Consumer: Sand Transaction ReceiptRama KrishnaNessuna valutazione finora
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Signature/valid: File NO.I&PW-A3/171/2018-FINDocumento1 paginaSignature/valid: File NO.I&PW-A3/171/2018-FINRama KrishnaNessuna valutazione finora
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
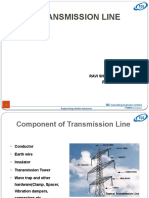
- Transmission Line: Ravi Shankar Singh (E6S304)Documento44 pagineTransmission Line: Ravi Shankar Singh (E6S304)amit143263Nessuna valutazione finora
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- RK ContractorsDocumento1 paginaRK ContractorsRama KrishnaNessuna valutazione finora
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- M.tech ThesisDocumento59 pagineM.tech ThesisRama Krishna100% (1)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Story of Electricity (Tell Me Why #126) (Gnv64)Documento98 pagineStory of Electricity (Tell Me Why #126) (Gnv64)Rama Krishna100% (6)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Spouse Certificate: Declaration by The Teacher Applying Under SpouseDocumento7 pagineSpouse Certificate: Declaration by The Teacher Applying Under SpouseRama KrishnaNessuna valutazione finora
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Manual On Transmission Line TowersDocumento58 pagineManual On Transmission Line TowersKamalanathan Rajeshkumar91% (35)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- Aerospace America May 2017Documento68 pagineAerospace America May 2017Rama KrishnaNessuna valutazione finora
- 75 - Modeling & Simulation of Solid State TransformerDocumento8 pagine75 - Modeling & Simulation of Solid State TransformerRama KrishnaNessuna valutazione finora
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- New Doc 2017-03-30Documento1 paginaNew Doc 2017-03-30Rama KrishnaNessuna valutazione finora
- On Load Tap ChangersDocumento42 pagineOn Load Tap ChangersRama Krishna100% (2)
- Excel Tip & Excel Forum: 250 Ms-Excel Keyboard ShortcutsDocumento17 pagineExcel Tip & Excel Forum: 250 Ms-Excel Keyboard ShortcutsRama KrishnaNessuna valutazione finora
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Solid State TransformerDocumento12 pagineSolid State TransformerRama Krishna100% (1)
- Kubernetes CommandsDocumento36 pagineKubernetes CommandsOvigz Hero100% (2)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- Lesson Plan 2 Road FurnitureDocumento4 pagineLesson Plan 2 Road FurnitureShahbaz SharifNessuna valutazione finora
- Pds 55930Documento2 paginePds 55930ekosuryonoNessuna valutazione finora
- Report On Automatic Phase Changer: Submitted ByDocumento32 pagineReport On Automatic Phase Changer: Submitted ByAndrea JohnsonNessuna valutazione finora
- Programming Bayes Rule OptionalDocumento17 pagineProgramming Bayes Rule OptionalajuhaseenNessuna valutazione finora
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Ism CodeDocumento9 pagineIsm CodePraneel KurhadeNessuna valutazione finora
- MJ4502 High-Power PNP Silicon TransistorDocumento4 pagineMJ4502 High-Power PNP Silicon Transistorjoao victorNessuna valutazione finora
- Emergency LightingDocumento32 pagineEmergency LightingIsmet HizyoluNessuna valutazione finora
- PT14 Engine Monitor 1Documento2 paginePT14 Engine Monitor 1BJ DixNessuna valutazione finora
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Asme Wec Chapter Annual ReportDocumento12 pagineAsme Wec Chapter Annual ReportManazar HussainNessuna valutazione finora
- Preview ISO+749-1977 PDFDocumento3 paginePreview ISO+749-1977 PDFLiana GaniNessuna valutazione finora
- Ball Mill SizingDocumento10 pagineBall Mill Sizingvvananth100% (1)
- Supplier GPO Q TM 0001 02 SPDCR TemplateDocumento6 pagineSupplier GPO Q TM 0001 02 SPDCR TemplateMahe RonaldoNessuna valutazione finora
- GIS Project Management GIS Project Management: Quality Issues Quality IssuesDocumento1 paginaGIS Project Management GIS Project Management: Quality Issues Quality IssuesLeo DobreciNessuna valutazione finora
- State ManagementDocumento16 pagineState Managementnegikamal703Nessuna valutazione finora
- Braun KF40 - CDocumento17 pagineBraun KF40 - CAgung UtoyoNessuna valutazione finora
- IEM PI A401 - ANNEXE - Design & Site ExperienceDocumento5 pagineIEM PI A401 - ANNEXE - Design & Site ExperienceapiplajengilaNessuna valutazione finora
- Steel Top Hats Battens Capacitytables Product Technical ManualDocumento16 pagineSteel Top Hats Battens Capacitytables Product Technical ManualbhukthaNessuna valutazione finora
- Mauser 98K - Model 48 Rifle ManualDocumento20 pagineMauser 98K - Model 48 Rifle ManualMeor Amri96% (28)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Islamic Law - WaterDocumento12 pagineIslamic Law - WaterAnum FaheemNessuna valutazione finora
- 2 Coagulation FlocculationDocumento26 pagine2 Coagulation FlocculationNurSyuhada ANessuna valutazione finora
- Chapter 19A ConcreteDocumento10 pagineChapter 19A ConcreteMofasa ENessuna valutazione finora
- Quality Assurance Plan (1) ..Documento5 pagineQuality Assurance Plan (1) ..ARUNKUMARANNANBHEDANessuna valutazione finora
- Behringer UB2222FX PRODocumento5 pagineBehringer UB2222FX PROmtlcaqc97 mtlcaqc97Nessuna valutazione finora
- Diet Coke & Mentos Geyser Lab 2011-2012Documento4 pagineDiet Coke & Mentos Geyser Lab 2011-2012Frederick LoganNessuna valutazione finora
- ENOVIA V6 Product PortfolioDocumento32 pagineENOVIA V6 Product PortfolioARUN PATILNessuna valutazione finora
- Crankshaft Position (CKP) Sensor: 1F2-12 M161 Engine ControlsDocumento6 pagineCrankshaft Position (CKP) Sensor: 1F2-12 M161 Engine ControlsKukuh SeptiantoNessuna valutazione finora
- Determination of The Solubility Product Constant of Silver AcetateDocumento8 pagineDetermination of The Solubility Product Constant of Silver AcetateSara Al AzemNessuna valutazione finora
- Comfort and Performance Your Customers DemandDocumento18 pagineComfort and Performance Your Customers Demandgizex2013Nessuna valutazione finora
- Lecure Two. ReactorsDocumento56 pagineLecure Two. ReactorsSophia WambuiNessuna valutazione finora
- Electrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tDa EverandElectrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tValutazione: 4.5 su 5 stelle4.5/5 (27)
- Digital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosDa EverandDigital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosValutazione: 5 su 5 stelle5/5 (1)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionDa EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionValutazione: 4.5 su 5 stelle4.5/5 (543)
- 2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersDa Everand2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersValutazione: 5 su 5 stelle5/5 (1)