Potrebbero piacerti anche
- Industrial Automation Summer Training Report, PLC, SCADA, HMI Instrumentation - ShamsherDocumento49 pagineIndustrial Automation Summer Training Report, PLC, SCADA, HMI Instrumentation - ShamsherMd Shamsher86% (28)
- A Generalized Approach For The Acceleration and Deceleration of Industrial Robots and CNC Machine Tools - JeonDocumento7 pagineA Generalized Approach For The Acceleration and Deceleration of Industrial Robots and CNC Machine Tools - JeonddddNessuna valutazione finora
- Proposal Tugas Akhir 1Documento9 pagineProposal Tugas Akhir 1fiqri ibrahim aNessuna valutazione finora
- An Experimental Setup For The Study of Field-OrienDocumento5 pagineAn Experimental Setup For The Study of Field-OrienAraujo AlvesNessuna valutazione finora
- Implementationof Position Control Servo DCMotorwith PIDControllerto Humanoid Robot ArmDocumento7 pagineImplementationof Position Control Servo DCMotorwith PIDControllerto Humanoid Robot ArmMustafa AlhumayreNessuna valutazione finora
- Interfacing Matlab-2591 PDFDocumento8 pagineInterfacing Matlab-2591 PDFBourrasNessuna valutazione finora
- PID Controller of Speed and Torque of ServoMotor Using MATLABDocumento4 paginePID Controller of Speed and Torque of ServoMotor Using MATLABNader_Al_QahfNessuna valutazione finora
- Design of Intelligent Braking System: February 2000Documento7 pagineDesign of Intelligent Braking System: February 2000Sandeepkumar SgNessuna valutazione finora
- C2000 MCU Real-Time Industrial Control TrainingDocumento4 pagineC2000 MCU Real-Time Industrial Control TrainingPhạm Văn TưởngNessuna valutazione finora
- 06702722njlk o NJKL N JP o JN o LjinDocumento7 pagine06702722njlk o NJKL N JP o JN o LjinmugigeneNessuna valutazione finora
- Project 123Documento4 pagineProject 123Roshan DudhalkarNessuna valutazione finora
- Speed Control of DC Motor Using Artificial Neural NetworkDocumento10 pagineSpeed Control of DC Motor Using Artificial Neural NetworkIshanNessuna valutazione finora
- Prototype CNC Machine DesignDocumento7 paginePrototype CNC Machine DesignSuprapto ToNessuna valutazione finora
- Mechanical Design Thesis PDFDocumento4 pagineMechanical Design Thesis PDFfjh1q92b100% (1)
- Advances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaDa EverandAdvances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaFarrokh Janabi-SharifiNessuna valutazione finora
- Design, Trajectory Generation and Control of Quadrotor Research PlatformDocumento8 pagineDesign, Trajectory Generation and Control of Quadrotor Research PlatformTiến HồNessuna valutazione finora
- Dsp-Controlled Intelligent High-Performance AC Present FutureDocumento8 pagineDsp-Controlled Intelligent High-Performance AC Present FuturePraful YadavNessuna valutazione finora
- 146 562 1 PB PDFDocumento5 pagine146 562 1 PB PDFirqoviNessuna valutazione finora
- DC Motor Speed Controller Design Using Pulse WidthDocumento12 pagineDC Motor Speed Controller Design Using Pulse WidthHerman BachtiarNessuna valutazione finora
- Design and Simulation of DC Motor Speed Controller Using Pole Placement Technique and MATLABDocumento9 pagineDesign and Simulation of DC Motor Speed Controller Using Pole Placement Technique and MATLAB2K18/EE/244 VIPESH DUNKWALNessuna valutazione finora
- Thesis Motor ControlDocumento6 pagineThesis Motor Controlmarygregoryfortwayne100% (2)
- Sliding Mode Control ThesisDocumento6 pagineSliding Mode Control Thesisjqcoplhld100% (2)
- Comparative Study of CNC Controllers Used in CNC Milling MachineDocumento9 pagineComparative Study of CNC Controllers Used in CNC Milling MachineAJER JOURNALNessuna valutazione finora
- System Identification and Modelling of Rotary Inverted PendulumDocumento13 pagineSystem Identification and Modelling of Rotary Inverted PendulumVictor PassosNessuna valutazione finora
- PLC Based Solar Panel With Tilting Arrangement: April 2016Documento9 paginePLC Based Solar Panel With Tilting Arrangement: April 2016Paul TodericNessuna valutazione finora
- Open and Scalable Code For DroneDocumento55 pagineOpen and Scalable Code For DroneVaibhav Sharma100% (1)
- AMC2010 PlenaryDocumento15 pagineAMC2010 PlenaryWill BlackNessuna valutazione finora
- PLC Based Automatic Cutting MachineDocumento8 paginePLC Based Automatic Cutting MachineInternational Journal of Innovative Science and Research TechnologyNessuna valutazione finora
- Data Acquisition and Computer Simulation IntegrateDocumento12 pagineData Acquisition and Computer Simulation Integrateyc3879Nessuna valutazione finora
- Linear Algebra Applied To Kinematic ControlDocumento11 pagineLinear Algebra Applied To Kinematic ControlIng. José García, CSSONessuna valutazione finora
- PLC PDFDocumento9 paginePLC PDFloganathan sNessuna valutazione finora
- Induction Motor Speed Control ThesisDocumento7 pagineInduction Motor Speed Control ThesisPaperWritingServicesReviewsUK100% (2)
- Control and Interfacing of Motors With Ni-Labview Using Ni-MyrioDocumento5 pagineControl and Interfacing of Motors With Ni-Labview Using Ni-MyrioMuhammad Rizky KaisupyNessuna valutazione finora
- HTT Ran 2005Documento121 pagineHTT Ran 2005Nadone DonenaeNessuna valutazione finora
- Articulated Robotic ArmDocumento9 pagineArticulated Robotic ArmAkshat MishraNessuna valutazione finora
- Robô Pêndulo 2 Rodas - 1Documento7 pagineRobô Pêndulo 2 Rodas - 1Victor PassosNessuna valutazione finora
- Analog Control LaboratoryDocumento7 pagineAnalog Control LaboratoryAshik AhmedNessuna valutazione finora
- Sensorless Vector Control of Induction Motor ThesisDocumento7 pagineSensorless Vector Control of Induction Motor Thesisjencloudcleveland100% (2)
- Design of Intelligent Braking System: February 2000Documento7 pagineDesign of Intelligent Braking System: February 2000Nihal RajNessuna valutazione finora
- Torque Capability Improvement of Sensorless Foc Induction Machine in Field Weakening For Propulsion PurposesDocumento12 pagineTorque Capability Improvement of Sensorless Foc Induction Machine in Field Weakening For Propulsion PurposesVivek MishraNessuna valutazione finora
- Controller Design ThesisDocumento4 pagineController Design Thesisaprilgriffinbeaumont100% (2)
- LV RIO Elevator ControlDocumento55 pagineLV RIO Elevator Control石大明Nessuna valutazione finora
- Journal: Speed Control of DC Motor Using Programmable Logic ControllerDocumento3 pagineJournal: Speed Control of DC Motor Using Programmable Logic ControllerGo YouTube Go100% (1)
- Jurnal DC (Genetic Algorithm)Documento5 pagineJurnal DC (Genetic Algorithm)Puja Awwalia R.Nessuna valutazione finora
- Synchronization of Speed of DC Motors For Rolling Mills: D.Reddy PranaiDocumento5 pagineSynchronization of Speed of DC Motors For Rolling Mills: D.Reddy PranaiBandi GaneshNessuna valutazione finora
- Hnicem 2014 7016245Documento6 pagineHnicem 2014 7016245Thành NguyễnNessuna valutazione finora
- Real-Time Embedded Control System For VTOL Aircrafts: Application To Stabilize A Quad-Rotor HelicopterDocumento6 pagineReal-Time Embedded Control System For VTOL Aircrafts: Application To Stabilize A Quad-Rotor HelicopterasdssNessuna valutazione finora
- Literature Review On CNC MachineDocumento7 pagineLiterature Review On CNC Machineaflsnbfir100% (1)
- PLC & SCADA Based Condition Monitoring of Three Phase Induction MotorDocumento7 paginePLC & SCADA Based Condition Monitoring of Three Phase Induction MotorBui Hong PhongNessuna valutazione finora
- Robotic Arm Project ReportDocumento49 pagineRobotic Arm Project Reportarunguptha_gsNessuna valutazione finora
- Design and Implement of A State Feedback Position Output Controller For A Maxon S-DC Motor With DspaceDocumento7 pagineDesign and Implement of A State Feedback Position Output Controller For A Maxon S-DC Motor With Dspacesarmad.hassanNessuna valutazione finora
- Sri Siddartha Institute of Technology: Under The Guidance ofDocumento25 pagineSri Siddartha Institute of Technology: Under The Guidance ofShiva Prasad MNessuna valutazione finora
- PLC Based Industrial Conveyor Automation andDocumento6 paginePLC Based Industrial Conveyor Automation andiaetsdiaetsdNessuna valutazione finora
- Literature Review DC Motor Speed ControlDocumento5 pagineLiterature Review DC Motor Speed Controlnynodok1pup3100% (1)
- Servo Motor Position Control Using Ic 555 TimerDocumento17 pagineServo Motor Position Control Using Ic 555 Timershiv100% (1)
- A Project ProposalDocumento5 pagineA Project ProposalMuhammad Umer FarooqNessuna valutazione finora
- 2267 Hay PDFDocumento13 pagine2267 Hay PDFHoang Duc ThucNessuna valutazione finora
- Automatic Simulation Measurement and Verification of Inputs and Outputs of Body Control ModuleDocumento4 pagineAutomatic Simulation Measurement and Verification of Inputs and Outputs of Body Control ModuleInternational Journal of Innovative Science and Research TechnologyNessuna valutazione finora
- Speed Control of An Induction Motor Using Raspberry PIDocumento7 pagineSpeed Control of An Induction Motor Using Raspberry PIANAMIKA BHARALINessuna valutazione finora
- Aerated Concrete Production Using Various Raw MaterialsDocumento5 pagineAerated Concrete Production Using Various Raw Materialskinley dorjee100% (1)
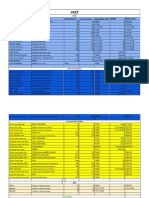
- Jazz PrepaidDocumento4 pagineJazz PrepaidHoney BunnyNessuna valutazione finora
- List of Important Books of PhysicsDocumento6 pagineList of Important Books of PhysicsAbubakar Mughal0% (1)
- DLPFBSDocumento1 paginaDLPFBSEdnaMarquezMoralesNessuna valutazione finora
- ER288 090714 5082 CV OKP (089) Method Statement For Plate Baring TestDocumento3 pagineER288 090714 5082 CV OKP (089) Method Statement For Plate Baring TestWr ArNessuna valutazione finora
- Information Brochure: (Special Rounds)Documento35 pagineInformation Brochure: (Special Rounds)Praveen KumarNessuna valutazione finora
- Catalog NeosetDocumento173 pagineCatalog NeosetCarmen Draghia100% (1)
- Selecting Appropriate Instructional Materials For Edukasyong Pantahanan at Pangkabuhayan/ Technology and Livelihood EducationDocumento35 pagineSelecting Appropriate Instructional Materials For Edukasyong Pantahanan at Pangkabuhayan/ Technology and Livelihood EducationJhenn Mhen Yhon100% (1)
- 8 Lesson 13 Viking FranceDocumento2 pagine8 Lesson 13 Viking Franceapi-332379661Nessuna valutazione finora
- On The Importance of Learning Statistics For Psychology StudentsDocumento2 pagineOn The Importance of Learning Statistics For Psychology StudentsMadison HartfieldNessuna valutazione finora
- Surge Arrester PresentationDocumento63 pagineSurge Arrester PresentationRamiro FelicianoNessuna valutazione finora
- Introduction To The Iceberg ModelDocumento5 pagineIntroduction To The Iceberg ModelAbhay Tiwari100% (1)
- Hunger Games Mini Socratic Seminar2012Documento4 pagineHunger Games Mini Socratic Seminar2012Cary L. TylerNessuna valutazione finora
- ITP - Plaster WorkDocumento1 paginaITP - Plaster Workmahmoud ghanemNessuna valutazione finora
- Question BankDocumento3 pagineQuestion BankHimanshu SharmaNessuna valutazione finora
- An Overview and Framework For PD Backtesting and BenchmarkingDocumento16 pagineAn Overview and Framework For PD Backtesting and BenchmarkingCISSE SerigneNessuna valutazione finora
- Chapter 2 Axial and Torsional ElementsDocumento57 pagineChapter 2 Axial and Torsional ElementsAhmad FaidhiNessuna valutazione finora
- Machine Design REE 302: CH 1: Introduction To Mechanical Engineering DesignDocumento26 pagineMachine Design REE 302: CH 1: Introduction To Mechanical Engineering DesignDull PersonNessuna valutazione finora
- Hawassa University Institute of Technology (Iot) : Electromechanical Engineering Program Entrepreneurship For EngineersDocumento133 pagineHawassa University Institute of Technology (Iot) : Electromechanical Engineering Program Entrepreneurship For EngineersTinsae LireNessuna valutazione finora
- Operations and Service ManualDocumento311 pagineOperations and Service ManualELARD GUILLENNessuna valutazione finora
- STFC-2023 International E - conference-BITDocumento6 pagineSTFC-2023 International E - conference-BITRanilprabhu MNessuna valutazione finora
- TOPIC: Movable and Immovable Property Under Section-3 of Transfer of Property ActDocumento10 pagineTOPIC: Movable and Immovable Property Under Section-3 of Transfer of Property ActRishAbh DaidNessuna valutazione finora
- Changing Historical Perspectives On The Nazi DictatorshipDocumento9 pagineChanging Historical Perspectives On The Nazi Dictatorshipuploadimage666Nessuna valutazione finora
- Dady - Piernas LargasDocumento12 pagineDady - Piernas LargasSarha NietoNessuna valutazione finora
- Workplace Risk Assessment PDFDocumento14 pagineWorkplace Risk Assessment PDFSyarul NizamzNessuna valutazione finora
- 1974 - Roncaglia - The Reduction of Complex LabourDocumento12 pagine1974 - Roncaglia - The Reduction of Complex LabourRichardNessuna valutazione finora
- Apps Android StudioDocumento12 pagineApps Android StudioDaniel AlcocerNessuna valutazione finora
- Answer:: Exercise-IDocumento15 pagineAnswer:: Exercise-IAishika NagNessuna valutazione finora
- Jarir IT Flyer Qatar1Documento4 pagineJarir IT Flyer Qatar1sebincherianNessuna valutazione finora
- 【SIEMENS】Cios Spin-FlyerDocumento8 pagine【SIEMENS】Cios Spin-FlyerAshleyNessuna valutazione finora