Potrebbero piacerti anche
- VC-1 Vector Algebra and CalculusDocumento28 pagineVC-1 Vector Algebra and CalculuseltyphysicsNessuna valutazione finora
- Course PDFDocumento102 pagineCourse PDFRocket FireNessuna valutazione finora
- Física Basica I Class 2: Coordinate Systems Scalars & VectoresDocumento36 pagineFísica Basica I Class 2: Coordinate Systems Scalars & VectoresRafael Esteban Barbosa MahechaNessuna valutazione finora
- Module 2 - DS IDocumento94 pagineModule 2 - DS IRoudra ChakrabortyNessuna valutazione finora
- Singular Value Decomposition (SVD)Documento94 pagineSingular Value Decomposition (SVD)Roudra ChakrabortyNessuna valutazione finora
- Ch03 - Part1 - RealVector V2a (61) - DONEDocumento61 pagineCh03 - Part1 - RealVector V2a (61) - DONEHsinminNessuna valutazione finora
- Vectors and Vector Spaces: Prof. Dr. Hani Mahdi Computer and System Engineering DepartmentDocumento73 pagineVectors and Vector Spaces: Prof. Dr. Hani Mahdi Computer and System Engineering DepartmentAhmed AdelNessuna valutazione finora
- 2.2 Linear Algebra & GeometryDocumento16 pagine2.2 Linear Algebra & GeometryRajaNessuna valutazione finora
- CourseDocumento102 pagineCourseIrtiza HussainNessuna valutazione finora
- Linear Algebra PDFDocumento99 pagineLinear Algebra PDFshankar khanalNessuna valutazione finora
- Vector Notes (Year 1)Documento23 pagineVector Notes (Year 1)alicia.milligan1107Nessuna valutazione finora
- Ms3 Quadratic BookDocumento29 pagineMs3 Quadratic BookZaman AnikNessuna valutazione finora
- Eigenvalues and EigenvectorsDocumento24 pagineEigenvalues and EigenvectorswkpfckgwNessuna valutazione finora
- Data Mining: Dimensionality Reduction Pca - SVDDocumento33 pagineData Mining: Dimensionality Reduction Pca - SVDArul Kumar VenugopalNessuna valutazione finora
- 01 B Linear Algebra ReviewDocumento47 pagine01 B Linear Algebra Reviewpham tamNessuna valutazione finora
- CHAPTER 1: Mathematical Physics: ContainsDocumento29 pagineCHAPTER 1: Mathematical Physics: ContainsMukit Hasan JimNessuna valutazione finora
- Analisis Peubah Ganda 2Documento61 pagineAnalisis Peubah Ganda 2Azmi FaisalNessuna valutazione finora
- Vector LessonsDocumento36 pagineVector LessonsMarc RiveraNessuna valutazione finora
- MAI Lecture 02 Vectors and MatricesDocumento38 pagineMAI Lecture 02 Vectors and MatricesYeabsiraNessuna valutazione finora
- Notes - VectorsDocumento14 pagineNotes - VectorsmichaeldelennboschNessuna valutazione finora
- Mobile Robotics Lecture No. 2Documento61 pagineMobile Robotics Lecture No. 2ZaidKhanNessuna valutazione finora
- Lecture 2 StudentsDocumento73 pagineLecture 2 StudentszaidNessuna valutazione finora
- GrasshopperDocumento111 pagineGrasshopperAnver SherifNessuna valutazione finora
- Module1 ACEE4EmagsDocumento21 pagineModule1 ACEE4Emagsjosephryanbeloria45Nessuna valutazione finora
- 02 IRQ Mathematical FoundationDocumento50 pagine02 IRQ Mathematical FoundationSahan NishshankaNessuna valutazione finora
- BSSE 308-Linear Algebra (3+0)Documento20 pagineBSSE 308-Linear Algebra (3+0)Mohsin Ali ShahaniNessuna valutazione finora
- Chapt 3-VectorsDocumento25 pagineChapt 3-VectorsAbdullatif AlbattatNessuna valutazione finora
- Fdocuments - in - Introduction To Tensors Max Planck Why Tensors A Tensors Can Be Used When MatricesDocumento35 pagineFdocuments - in - Introduction To Tensors Max Planck Why Tensors A Tensors Can Be Used When Matricesmanjunath RamachandraNessuna valutazione finora
- PcaDocumento73 paginePca1balamanianNessuna valutazione finora
- CV Lecture 09 Histograms Covariance PCADocumento54 pagineCV Lecture 09 Histograms Covariance PCAariz.mohammadiNessuna valutazione finora
- Vector Space PresentationDocumento26 pagineVector Space Presentationmohibrajput230% (1)
- Calc2 6a Vectors and 3d Geometry PDFDocumento7 pagineCalc2 6a Vectors and 3d Geometry PDFAnkit RoyNessuna valutazione finora
- Lecture 4-Module 1-Vectors-Ave1Documento26 pagineLecture 4-Module 1-Vectors-Ave1simardhanda1Nessuna valutazione finora
- Lecture 01b 26092023 032657pmDocumento27 pagineLecture 01b 26092023 032657pmvacedok521Nessuna valutazione finora
- Module 2 ML Mumbai UniversityDocumento39 pagineModule 2 ML Mumbai University2021.shreya.pawaskarNessuna valutazione finora
- Lecture I: Vectors, Tensors, and Forms in Flat SpacetimeDocumento6 pagineLecture I: Vectors, Tensors, and Forms in Flat SpacetimeRaulNessuna valutazione finora
- Face Detection and Recognition 2019Documento20 pagineFace Detection and Recognition 2019Eman zakriaNessuna valutazione finora
- Direct Volume Rendering (DVR) : Ray-Casting: Jian HuangDocumento53 pagineDirect Volume Rendering (DVR) : Ray-Casting: Jian HuangnikhilaNessuna valutazione finora
- Matrix Algebra For Beginners, Part II Linear Transformations, Eigenvectors and EigenvaluesDocumento16 pagineMatrix Algebra For Beginners, Part II Linear Transformations, Eigenvectors and EigenvaluesPhine-hasNessuna valutazione finora
- Vectors in The PlaneDocumento13 pagineVectors in The PlaneA Hell In YarrowNessuna valutazione finora
- Vector 1Documento26 pagineVector 1A.HNessuna valutazione finora
- Introduction To Vectors-1Documento35 pagineIntroduction To Vectors-1Doreen BenezethNessuna valutazione finora
- Notes 12Documento22 pagineNotes 12Aqib Ali KhanNessuna valutazione finora
- Vectors - Chapter 2Documento7 pagineVectors - Chapter 2Lei LiNessuna valutazione finora
- Physic ClassDocumento19 paginePhysic ClassdeborahNessuna valutazione finora
- Karen Pao, Frederick Soon - Vector Calculus Study Guide & Solutions Manual - W. H. Freeman (2003)Documento171 pagineKaren Pao, Frederick Soon - Vector Calculus Study Guide & Solutions Manual - W. H. Freeman (2003)Adriano VerdérioNessuna valutazione finora
- Linear Algebra I: Course No. 100 221 Fall 2006 Michael StollDocumento68 pagineLinear Algebra I: Course No. 100 221 Fall 2006 Michael StollDilip Kumar100% (1)
- Engineering Mechanics Vectors and ScalarsDocumento42 pagineEngineering Mechanics Vectors and ScalarssatwantNessuna valutazione finora
- 1 VectorsDocumento25 pagine1 VectorsAyham SmadiNessuna valutazione finora
- Algorithm Lec10Documento61 pagineAlgorithm Lec10Habiba HegazyNessuna valutazione finora
- Phy 101 - FirstDocumento73 paginePhy 101 - FirstShaimaa HawadiNessuna valutazione finora
- 2-Geom 0Documento5 pagine2-Geom 0CSP EDUNessuna valutazione finora
- Physics Cheat Sheet Master PDFDocumento6 paginePhysics Cheat Sheet Master PDFCha GabrielNessuna valutazione finora
- Three-Dimensional Coordinate Systems: Jooned HendrarsaktiDocumento30 pagineThree-Dimensional Coordinate Systems: Jooned Hendrarsaktiwaridho IskandarNessuna valutazione finora
- 1 Ordinary Vectors and Rotation: X y Z X y ZDocumento11 pagine1 Ordinary Vectors and Rotation: X y Z X y ZMizanur RahmanNessuna valutazione finora
- 2 Slides Vector Calculus 1 v1 Narration 2 No InkDocumento21 pagine2 Slides Vector Calculus 1 v1 Narration 2 No Inkd. r. o. a.Nessuna valutazione finora
- P1 Chp11 VectorsDocumento29 pagineP1 Chp11 VectorsRizan RazakNessuna valutazione finora
- Elhabian ICP09Documento130 pagineElhabian ICP09angeliusNessuna valutazione finora
- Mathematics For Machine LearningDocumento100 pagineMathematics For Machine LearningUmaphani MorthaNessuna valutazione finora
- SMA 431 Differential GeometryDocumento96 pagineSMA 431 Differential GeometryJoshua AnnNessuna valutazione finora
- Announcements: A Tour of The Subatomic ZooDocumento23 pagineAnnouncements: A Tour of The Subatomic ZooReddyvari VenugopalNessuna valutazione finora
- Functional Analysis Lecture NotesDocumento52 pagineFunctional Analysis Lecture NotesTianyu TaoNessuna valutazione finora
- Homework7 240Documento3 pagineHomework7 240Jack MartzNessuna valutazione finora
- Ground Ring of Two Dimensional String TheoryDocumento37 pagineGround Ring of Two Dimensional String TheorypranavNessuna valutazione finora
- 01 - Hybridization of CarbonDocumento12 pagine01 - Hybridization of Carbon1jerryzhouNessuna valutazione finora
- Quantum Vampire: Collapse-Free Action at A Distance by The Photon Annihilation OperatorDocumento4 pagineQuantum Vampire: Collapse-Free Action at A Distance by The Photon Annihilation Operatorsad100% (1)
- 5.04 Principles of Inorganic Chemistry Ii : Mit OpencoursewareDocumento5 pagine5.04 Principles of Inorganic Chemistry Ii : Mit Opencoursewaresanskarid94Nessuna valutazione finora
- Partial Derivative of Composite FunctionDocumento5 paginePartial Derivative of Composite FunctionDibyananda SahooNessuna valutazione finora
- PHYS 624 (Fall 2010) : Advanced Quantum Mechanics Homeworks 1 Homework 1 (Classical Field Theory), Due Wednes-Day, September 15Documento24 paginePHYS 624 (Fall 2010) : Advanced Quantum Mechanics Homeworks 1 Homework 1 (Classical Field Theory), Due Wednes-Day, September 15Stephen RandallNessuna valutazione finora
- TensorDocumento6 pagineTensorVaishnav SankarkNessuna valutazione finora
- Sem-5 Physics Assignment-2019Documento3 pagineSem-5 Physics Assignment-2019Ajeet Singh2Nessuna valutazione finora
- Simplified Feynman DiagramsDocumento23 pagineSimplified Feynman Diagramssid_senadheera50% (2)
- Mini Project - 1: Parking Your Space TelescopeDocumento4 pagineMini Project - 1: Parking Your Space TelescopeSUBHASISH GUHANessuna valutazione finora
- Mat5101 Linear AlgebraDocumento142 pagineMat5101 Linear AlgebraMert sefasefeNessuna valutazione finora
- (Student Mathematical Library 47) L. D. Faddeev and O. A. Yakubovskii - Lectures On Quantum Mechanics For Mathematics Students (Student Mathematical Library) - American Mathematical Society (2009) PDFDocumento248 pagine(Student Mathematical Library 47) L. D. Faddeev and O. A. Yakubovskii - Lectures On Quantum Mechanics For Mathematics Students (Student Mathematical Library) - American Mathematical Society (2009) PDFMasacroso100% (1)
- Adobe Scan Dec 19, 2022Documento1 paginaAdobe Scan Dec 19, 2022Vicky VickyNessuna valutazione finora
- Raman Spectroscopy: B.Sc. (H) ChemistryDocumento10 pagineRaman Spectroscopy: B.Sc. (H) ChemistrySANJAY BHAVARIYANessuna valutazione finora
- Complementary Error Function Table: X Erfc (X) X Erfc (X) X Erfc (X) X Erfc (X) X Erfc (X) X Erfc (X) X Erfc (X)Documento1 paginaComplementary Error Function Table: X Erfc (X) X Erfc (X) X Erfc (X) X Erfc (X) X Erfc (X) X Erfc (X) X Erfc (X)Yadu KrishnanNessuna valutazione finora
- TEST 1. Integrals (2011) PDFDocumento2 pagineTEST 1. Integrals (2011) PDFuwu100% (1)
- Linear TransformationDocumento19 pagineLinear TransformationJinky CanitanNessuna valutazione finora
- Andrew M Steane Thermodynamics A Complete Undergraduate Course Oxford University Press 2016Documento340 pagineAndrew M Steane Thermodynamics A Complete Undergraduate Course Oxford University Press 2016Maxo de la HidalgaNessuna valutazione finora
- An Introduction To Riemannian Geometry PDFDocumento476 pagineAn Introduction To Riemannian Geometry PDFcxiii100% (6)
- Lectut PHN-204 PDF Zeeman EffectDocumento23 pagineLectut PHN-204 PDF Zeeman EffectAnurag KumarNessuna valutazione finora
- Introduction To Solid State PhysicsDocumento7 pagineIntroduction To Solid State Physicsamitroy.100907Nessuna valutazione finora
- Life Evolution Universe Lecture Notes - AUCDocumento45 pagineLife Evolution Universe Lecture Notes - AUCAlejandro VerdeNessuna valutazione finora
- Appendix Trigonometry Properties & Fourier Series: DT T X T A DT T X T ADocumento5 pagineAppendix Trigonometry Properties & Fourier Series: DT T X T A DT T X T AFarah Liyana RahimNessuna valutazione finora
- Phys 201 Sample FinalDocumento7 paginePhys 201 Sample Finalsads33Nessuna valutazione finora
- 1st Periodical Test - Gen - Physics 2Documento1 pagina1st Periodical Test - Gen - Physics 2Leah Mae FranceNessuna valutazione finora
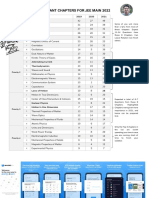
- Physics Most Important Chapters 2022Documento2 paginePhysics Most Important Chapters 2022VINOD JINessuna valutazione finora