Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (890)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- f37 Servicemanual Vol2 PDFDocumento217 paginef37 Servicemanual Vol2 PDFrobertoNessuna valutazione finora
- Myths and Facts - Bangladesh Liberation War - B.Z. Khasru PDFDocumento185 pagineMyths and Facts - Bangladesh Liberation War - B.Z. Khasru PDFকিমজং উন উত্তর কোরিয়ার বাবা100% (1)
- IIT Patna Voltage to Frequency ExperimentDocumento2 pagineIIT Patna Voltage to Frequency ExperimentHritik KumarNessuna valutazione finora
- Chapter 14, Solution 1.: = ω) (, whereDocumento74 pagineChapter 14, Solution 1.: = ω) (, whereJuanFernandoCuadradoNessuna valutazione finora
- Nord: Node-Router Decoupling For Effective Power-Gating of On-Chip RoutersDocumento12 pagineNord: Node-Router Decoupling For Effective Power-Gating of On-Chip Routersrohan adapurNessuna valutazione finora
- My CommandsDocumento1 paginaMy Commandsrohan adapurNessuna valutazione finora
- SUMSEM2016-17 ECE6026 ETH 1660 01-JUN-2017 RM001 BRSummer15Switch PDFDocumento4 pagineSUMSEM2016-17 ECE6026 ETH 1660 01-JUN-2017 RM001 BRSummer15Switch PDFrohan adapurNessuna valutazione finora
- New Text DocumentDocumento3 pagineNew Text Documentrohan adapurNessuna valutazione finora
- TCL AssignDocumento1 paginaTCL Assignrohan adapurNessuna valutazione finora
- Route FunctionDocumento34 pagineRoute Functionrohan adapurNessuna valutazione finora
- DCT MuxDocumento5 pagineDCT Muxrohan adapurNessuna valutazione finora
- ReadmeDocumento1 paginaReadmerohan adapurNessuna valutazione finora
- ReadmeDocumento1 paginaReadmerohan adapurNessuna valutazione finora
- SVE Society’s BHEEMANNA KHANDRE INSTITUTE OF TECHNOLOGY Analog Circuit TestDocumento2 pagineSVE Society’s BHEEMANNA KHANDRE INSTITUTE OF TECHNOLOGY Analog Circuit TestsharanbasappaNessuna valutazione finora
- Isc N-Channel MOSFET Transistor SPP17N80C3 ISPP17N80C3: INCHANGE SemiconductorDocumento2 pagineIsc N-Channel MOSFET Transistor SPP17N80C3 ISPP17N80C3: INCHANGE SemiconductorMiguel CorderoNessuna valutazione finora
- WS7106 / WS7107: 3 Digit LCD/LED Display A/D ConvertersDocumento14 pagineWS7106 / WS7107: 3 Digit LCD/LED Display A/D ConvertersbluefaithNessuna valutazione finora
- Vox AC30 AmplifierDocumento3 pagineVox AC30 AmplifierparascoliNessuna valutazione finora
- LNA Design Uses Series Feedbackto Achieve Simultaneous Low Input VSWR and LowDocumento5 pagineLNA Design Uses Series Feedbackto Achieve Simultaneous Low Input VSWR and LowphilippebNessuna valutazione finora
- Precision Full Wave RectifierDocumento4 paginePrecision Full Wave Rectifiermjns25Nessuna valutazione finora
- Electronics, Digital Logic and Design: Dr. Irfan UddinDocumento79 pagineElectronics, Digital Logic and Design: Dr. Irfan UddinAbdul RehmanNessuna valutazione finora
- Adp1073 Convertidor DCDocumento16 pagineAdp1073 Convertidor DCJuan Carlos Troche FernandezNessuna valutazione finora
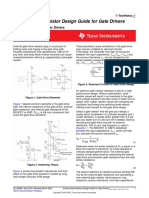
- External Gate Resistor Design Guide For Gate Drivers: Mateo Begue, High Power DriversDocumento4 pagineExternal Gate Resistor Design Guide For Gate Drivers: Mateo Begue, High Power Driversselim007Nessuna valutazione finora
- Synch Panel 3200aDocumento11 pagineSynch Panel 3200aIslam AlazbNessuna valutazione finora
- Power AmplifierDocumento37 paginePower AmplifierSristick100% (6)
- Physical Design Interview Questions Part 2Documento2 paginePhysical Design Interview Questions Part 2srinathNessuna valutazione finora
- BGA Breakout Challenges: by Charles Pfeil, Mentor GraphicsDocumento4 pagineBGA Breakout Challenges: by Charles Pfeil, Mentor GraphicsBenyamin Farzaneh AghajarieNessuna valutazione finora
- KA558 FairchildSemiconductor PDFDocumento6 pagineKA558 FairchildSemiconductor PDFCajun LeBeauNessuna valutazione finora
- Chapter 6Documento7 pagineChapter 6William LeiteNessuna valutazione finora
- Designing With Xc9500 CPLDS: Interconnect Within Function BlocksDocumento8 pagineDesigning With Xc9500 CPLDS: Interconnect Within Function BlocksvenkateshNessuna valutazione finora
- PD Evaluation Test 1Documento2 paginePD Evaluation Test 1Sujit KumarNessuna valutazione finora
- Tonepad BluesbreakerDocumento2 pagineTonepad BluesbreakerReska Andree RachmawanNessuna valutazione finora
- Antenna Tuner G3WMEDocumento2 pagineAntenna Tuner G3WMEfox7878100% (1)
- KTMICRODocumento28 pagineKTMICROthiago garofaloNessuna valutazione finora
- EE8251 IQ 2marksDocumento43 pagineEE8251 IQ 2marksBoopathi Sambandha MoorthiNessuna valutazione finora
- How 555 Timer IC Testing Circuit WorksDocumento5 pagineHow 555 Timer IC Testing Circuit WorksJoey TorresNessuna valutazione finora
- NDB Dxing Minimalist ApproachDocumento5 pagineNDB Dxing Minimalist Approachasdfgh88Nessuna valutazione finora
- Adc Lab Pic18Documento23 pagineAdc Lab Pic18Bolarinwa Joseph100% (1)
- GATE+ISRO DIGITAL LOGIC AND COMPUTER ORGANIZATION 2015 - Sequential CircuitsDocumento35 pagineGATE+ISRO DIGITAL LOGIC AND COMPUTER ORGANIZATION 2015 - Sequential CircuitsRejinRajanNessuna valutazione finora
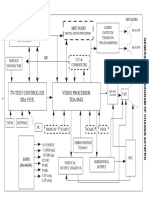
- General block diagram of AK19Pro TV chassisDocumento40 pagineGeneral block diagram of AK19Pro TV chassisAdam LiviuNessuna valutazione finora
- STA7130MPR/7131MPR/7132MPR: 2-Phase To 2W 1-2 Phase Excitation Support, Built-In SequencerDocumento2 pagineSTA7130MPR/7131MPR/7132MPR: 2-Phase To 2W 1-2 Phase Excitation Support, Built-In SequencerDriss Ben MohamedNessuna valutazione finora