Potrebbero piacerti anche
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- More Downlaod LinksDocumento19 pagineMore Downlaod LinkssureshNessuna valutazione finora
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Preface TO The Second: EditionDocumento2 paginePreface TO The Second: EditionHimanshu Kumar SagarNessuna valutazione finora
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- IEEE Guide For Abnormal Frequency Protection For Power Generating PlantsDocumento32 pagineIEEE Guide For Abnormal Frequency Protection For Power Generating PlantssureshNessuna valutazione finora
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Preface To The Second Edition Preface To The First Edition Xi XiiiDocumento6 paginePreface To The Second Edition Preface To The First Edition Xi XiiisureshNessuna valutazione finora
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Power Generation, Operation, Control: Allen WoodDocumento2 paginePower Generation, Operation, Control: Allen WoodMuhammad FachriNessuna valutazione finora
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Power System Stability and ControlDocumento1 paginaPower System Stability and ControlsureshNessuna valutazione finora
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- 01Documento7 pagine01hananwarNessuna valutazione finora
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Steward 2017 SelectedDocumento1 paginaSteward 2017 SelectedsureshNessuna valutazione finora
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Thilatharpanapuri or Adhi Vinayakar Temple - Temples of TamilnaduDocumento3 pagineThilatharpanapuri or Adhi Vinayakar Temple - Temples of TamilnadusureshNessuna valutazione finora
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Tangedco Revtariff-New Apr 2012Documento1 paginaTangedco Revtariff-New Apr 2012Aravindan MuthuNessuna valutazione finora
- Academic Calendar (Even Semester) Final UGDocumento1 paginaAcademic Calendar (Even Semester) Final UGsureshNessuna valutazione finora
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- ThilatharpanapuriDocumento5 pagineThilatharpanapurisureshNessuna valutazione finora
- Electrical 2015Documento18 pagineElectrical 2015Sujit KangsabanikNessuna valutazione finora
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- Advertisement Corporate ManagerDocumento1 paginaAdvertisement Corporate ManagersureshNessuna valutazione finora
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- Transient Analysis of Low-Voltage Ride-Through in Three-PhaseDocumento12 pagineTransient Analysis of Low-Voltage Ride-Through in Three-PhasesureshNessuna valutazione finora
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Using Tenses in Scientific Writing Update 051112Documento2 pagineUsing Tenses in Scientific Writing Update 051112Katen MistryNessuna valutazione finora
- Sbi RecruitmentDocumento4 pagineSbi RecruitmentNDTVNessuna valutazione finora
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Ramayana Details of RouteDocumento9 pagineRamayana Details of RoutennrsekharNessuna valutazione finora
- 24 - 01 - 2016 - General - English - OFFICIAL ANSWER KEYDocumento26 pagine24 - 01 - 2016 - General - English - OFFICIAL ANSWER KEYsasNessuna valutazione finora
- 1490334580274giKKLi6UEC5xMga5 PDFDocumento2 pagine1490334580274giKKLi6UEC5xMga5 PDFsureshNessuna valutazione finora
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Low-Voltage Ride-Through Capability ofDocumento10 pagineLow-Voltage Ride-Through Capability ofsureshNessuna valutazione finora
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Braun Der Journal Vol3 No3safeDocumento16 pagineBraun Der Journal Vol3 No3safesureshNessuna valutazione finora
- Predictive1 PDFDocumento16 paginePredictive1 PDFsureshNessuna valutazione finora
- TNPSC Group 2A Notification 2017 PDFDocumento4 pagineTNPSC Group 2A Notification 2017 PDFsureshNessuna valutazione finora
- 312 E Book1Documento440 pagine312 E Book1Dipayan Biswas100% (1)
- Control of DC MicrogridDocumento21 pagineControl of DC MicrogridsureshNessuna valutazione finora
- Requirements For An Advanced PMUDocumento2 pagineRequirements For An Advanced PMUsureshNessuna valutazione finora
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- PDFDocumento74 paginePDFKingsuk SahaNessuna valutazione finora
- Tema Matrix. Tallinn May 2013Documento36 pagineTema Matrix. Tallinn May 2013sureshNessuna valutazione finora
- EWM Simple Inbound - TestedDocumento6 pagineEWM Simple Inbound - TestedNikhil kumarNessuna valutazione finora
- How To Set Up A Call Centre From Scratch - The Checklist PDFDocumento12 pagineHow To Set Up A Call Centre From Scratch - The Checklist PDFOmar BenkiraneNessuna valutazione finora
- MCQ CsDocumento71 pagineMCQ CspreethiNessuna valutazione finora
- Scilab/Scicos Toolboxes For TelecommunicationsDocumento15 pagineScilab/Scicos Toolboxes For TelecommunicationsJuanNessuna valutazione finora
- NT11 NT21: Programmable TerminalsDocumento4 pagineNT11 NT21: Programmable TerminalsSetija BudiNessuna valutazione finora
- CV Agung Permana (Juni 2019)Documento1 paginaCV Agung Permana (Juni 2019)Agung PermanaNessuna valutazione finora
- Its - An Interactive Translation SystemDocumento9 pagineIts - An Interactive Translation SystemMohammad AlanaziNessuna valutazione finora
- Iccit 2005 Ppmtree PaperDocumento5 pagineIccit 2005 Ppmtree Papernobeen666Nessuna valutazione finora
- 202003251324427324himanshu Linked ListDocumento60 pagine202003251324427324himanshu Linked Listaparna gurramNessuna valutazione finora
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Virtual Appliance Manager 8.4.0 Installation GuideDocumento62 pagineVirtual Appliance Manager 8.4.0 Installation GuideFarha AzadNessuna valutazione finora
- MVC Training Course Prerequisite: WWW - Focustech.InDocumento2 pagineMVC Training Course Prerequisite: WWW - Focustech.InLakshman Samanth ReddyNessuna valutazione finora
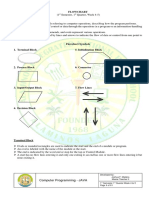
- 1st Sem 1st QTR - Week 4-5 Module in Computer Programming JAVA - Modular 11 PagesDocumento11 pagine1st Sem 1st QTR - Week 4-5 Module in Computer Programming JAVA - Modular 11 PagesJoshua Fandialan MaderaNessuna valutazione finora
- Digi ClassDocumento15 pagineDigi Classsaurabhchhabra01Nessuna valutazione finora
- Music Reader ComparisonDocumento5 pagineMusic Reader ComparisonMarc RobertsNessuna valutazione finora
- SLAM IntroductionDocumento14 pagineSLAM IntroductionMuthukumaranNessuna valutazione finora
- Intro Software Engineering Lecture #1Documento42 pagineIntro Software Engineering Lecture #1WilliamNessuna valutazione finora
- To Feel More Confident While Providing Support Where NeededDocumento60 pagineTo Feel More Confident While Providing Support Where NeededKean CardenasNessuna valutazione finora
- 33 Refman3.0Documento302 pagine33 Refman3.0Christian ChavezNessuna valutazione finora
- D20DT Frames Laboratorykk - Brief 2014-15Documento11 pagineD20DT Frames Laboratorykk - Brief 2014-15MaxNessuna valutazione finora
- Using PostgreSQL in Web 2.0 ApplicationsDocumento21 pagineUsing PostgreSQL in Web 2.0 ApplicationsNikolay Samokhvalov100% (8)
- Chapter 3 and 4Documento31 pagineChapter 3 and 4Rey Allen TenosoNessuna valutazione finora
- AGA Report No.9-1998 - Measurement of Gas by Multipath Ultrasonic Meters PDFDocumento81 pagineAGA Report No.9-1998 - Measurement of Gas by Multipath Ultrasonic Meters PDFSyaiful Rizal0% (1)
- 25355595Documento26 pagine25355595Essoff EssoffNessuna valutazione finora
- (123doc) - Toeic-Answer-Sheet-Phieu-Tra-Loi-Thi-Toeic-Iig-Vietnam PDFDocumento2 pagine(123doc) - Toeic-Answer-Sheet-Phieu-Tra-Loi-Thi-Toeic-Iig-Vietnam PDFtunb82Nessuna valutazione finora
- Position Title: Duty Manager REPORTS TO: Front Office Manager Position SummaryDocumento3 paginePosition Title: Duty Manager REPORTS TO: Front Office Manager Position SummaryKartiman KtmNessuna valutazione finora
- CMPT 120 Introduction To Programming (Section D400) : © Victor Cheung, 2020Documento28 pagineCMPT 120 Introduction To Programming (Section D400) : © Victor Cheung, 2020Mark BellNessuna valutazione finora
- Cognos Installation Guide ODBCDocumento264 pagineCognos Installation Guide ODBCalbertoalberto_freeNessuna valutazione finora
- IS 7118 Unit1 IntroductionDocumento58 pagineIS 7118 Unit1 IntroductionDereje ChinklNessuna valutazione finora
- WLAN AC V200R021C00SPC100 Release NotesDocumento17 pagineWLAN AC V200R021C00SPC100 Release NotesJulián PosadaNessuna valutazione finora
- The Hanging Tree - Jennifer LawrenceDocumento6 pagineThe Hanging Tree - Jennifer LawrenceChan Sek Yeong100% (1)
- Hacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsDa EverandHacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsValutazione: 3.5 su 5 stelle3.5/5 (2)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeDa EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeValutazione: 4.5 su 5 stelle4.5/5 (9)
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialDa EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialValutazione: 3.5 su 5 stelle3.5/5 (3)
- Teach Yourself Electricity and Electronics, 6th EditionDa EverandTeach Yourself Electricity and Electronics, 6th EditionValutazione: 3.5 su 5 stelle3.5/5 (15)
- INCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesDa EverandINCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesValutazione: 5 su 5 stelle5/5 (1)
- Digital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosDa EverandDigital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosValutazione: 5 su 5 stelle5/5 (1)
- Electrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tDa EverandElectrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tValutazione: 4.5 su 5 stelle4.5/5 (27)