Potrebbero piacerti anche
- Problems in the Design and Development of 750 MW Turbogenerators: International Series of Monographs on Electronics and InstrumentationDa EverandProblems in the Design and Development of 750 MW Turbogenerators: International Series of Monographs on Electronics and InstrumentationNessuna valutazione finora
- Woodward Industrial Turbine ControlDocumento16 pagineWoodward Industrial Turbine ControlhrstgaNessuna valutazione finora
- Automatic Control in Power Generation, Distribution and Protection: Proceedings of the IFAC Symposium, Pretoria, Republic of South Africa, 15-19 September 1980Da EverandAutomatic Control in Power Generation, Distribution and Protection: Proceedings of the IFAC Symposium, Pretoria, Republic of South Africa, 15-19 September 1980J. F. HerbstValutazione: 3.5 su 5 stelle3.5/5 (2)
- Synchronous MachineDocumento33 pagineSynchronous Machinecrisis_z100% (1)
- Sachin Governing System or DEHDocumento38 pagineSachin Governing System or DEHNaveenNessuna valutazione finora
- Governing of Turbine HydraulicDocumento3 pagineGoverning of Turbine HydraulicMike100% (1)
- 2-Pole Turbine Driven Generators - Brushless ExcitationDocumento2 pagine2-Pole Turbine Driven Generators - Brushless ExcitationChandrasekar Karuppasamy100% (1)
- Turbine Control PINDocumento4 pagineTurbine Control PINAnonymous NwnJNO100% (1)
- M+S Bót LáiDocumento54 pagineM+S Bót LáidoanmdatNessuna valutazione finora
- Hydraulic Turbines: Device For Exchange of Energy Between A Fluid Medium and A Mechanical SystemDocumento35 pagineHydraulic Turbines: Device For Exchange of Energy Between A Fluid Medium and A Mechanical SystemJatinder Kumar100% (1)
- Introduction Cross Flow Turbine PDFDocumento35 pagineIntroduction Cross Flow Turbine PDFmeku44100% (2)
- Marine Frequency ConvertersDocumento20 pagineMarine Frequency Convertersrajee7Nessuna valutazione finora
- Governing System of Gas TurbineDocumento128 pagineGoverning System of Gas Turbinesaptarshi roy100% (3)
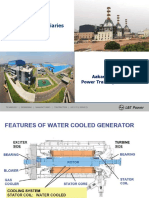
- Generator AuxiliariesDocumento39 pagineGenerator Auxiliariesharry2586Nessuna valutazione finora
- Turbine Supervisory InstrumentsationDocumento52 pagineTurbine Supervisory InstrumentsationKarthi KeyanNessuna valutazione finora
- CH 07Documento60 pagineCH 07Lucais KwonNessuna valutazione finora
- Fisher Steam Turbines Application Guide August 2013Documento11 pagineFisher Steam Turbines Application Guide August 2013Juan Manuel Pardal100% (1)
- Intorduction To Power Engineering - 4 GeneratorsDocumento26 pagineIntorduction To Power Engineering - 4 Generatorssyedsalmanali91Nessuna valutazione finora
- Specification For MotorsDocumento10 pagineSpecification For MotorsJyothisrikanthNessuna valutazione finora
- Catálogo Turbinas GilkesDocumento12 pagineCatálogo Turbinas GilkesEdú Brizuela100% (1)
- Generator ProtectionDocumento48 pagineGenerator ProtectionshankergodwalNessuna valutazione finora
- Axial-Fan Transformers enDocumento36 pagineAxial-Fan Transformers enEko SusantoNessuna valutazione finora
- 2 - Generator - PP SlidesDocumento204 pagine2 - Generator - PP SlideskrishnaNessuna valutazione finora
- Excitation System of Alternator IJERTV2IS2515Documento6 pagineExcitation System of Alternator IJERTV2IS2515MangeshRudrawar100% (1)
- Basics of Governing System: Drawings Are Not As Per ActualDocumento25 pagineBasics of Governing System: Drawings Are Not As Per ActualAhemad100% (1)
- GTG 1383om Piel Sul 48mchpDocumento18 pagineGTG 1383om Piel Sul 48mchpjohn smithyNessuna valutazione finora
- I&c TrainingDocumento175 pagineI&c TrainingMuhammad FathoniNessuna valutazione finora
- Hydraulic Pumps - Hydraulic Pump TypesDocumento28 pagineHydraulic Pumps - Hydraulic Pump TypesMohammed Al-OdatNessuna valutazione finora
- Sulzer - Your Partner For Hydraulic Power RecoveryDocumento8 pagineSulzer - Your Partner For Hydraulic Power RecoveryAnonymous uCYIu1100% (1)
- Npt56 Excitation SystemsDocumento13 pagineNpt56 Excitation Systemsengmohsen.ramadanhotmail.comNessuna valutazione finora
- Speed Droop Is A Governor Function Which Reduces The Governor Reference Speed As Fuel PositionDocumento1 paginaSpeed Droop Is A Governor Function Which Reduces The Governor Reference Speed As Fuel PositionAnakin Skywalker0% (1)
- Introduction To AlternatorsDocumento12 pagineIntroduction To AlternatorsAriane Joyce Villafranca GaraNessuna valutazione finora
- 261Documento11 pagine261nitinseebNessuna valutazione finora
- Synchronous Machine Theory and ModelingDocumento108 pagineSynchronous Machine Theory and Modelingnanavarasmdu100% (1)
- China - Wind Energy IndustryDocumento36 pagineChina - Wind Energy IndustrySamuel Arévalo GNessuna valutazione finora
- CL NabllabDocumento71 pagineCL NabllabBhart AutomationNessuna valutazione finora
- wgp4205 Turbine PDFDocumento46 paginewgp4205 Turbine PDFM Tri WinarkoNessuna valutazione finora
- Catalogo Thyripol Ingles - ExcitacaoDocumento14 pagineCatalogo Thyripol Ingles - ExcitacaoErbil KeskinNessuna valutazione finora
- Kwu Steam Turbine GoverningDocumento25 pagineKwu Steam Turbine GoverningDevanshu SinghNessuna valutazione finora
- The Effects of High Vibration On The Steam Turbo-Generator MachinesDocumento55 pagineThe Effects of High Vibration On The Steam Turbo-Generator MachinesFarhad YahyaieNessuna valutazione finora
- Steam TurbineDocumento27 pagineSteam TurbinePrakashKr100% (1)
- Generator Construction, Opn N Cooling SystemDocumento187 pagineGenerator Construction, Opn N Cooling SystemHelal RahmanNessuna valutazione finora
- Electrical Engineering QUESTION BANKDocumento7 pagineElectrical Engineering QUESTION BANKMATHANKUMAR.S100% (1)
- Chapter 7 Hydraulic TurbinesDocumento49 pagineChapter 7 Hydraulic TurbinesRas MekonnenNessuna valutazione finora
- ATS - EnGDocumento4 pagineATS - EnGRamires AdeNessuna valutazione finora
- Prsentation Wind TurbineDocumento10 paginePrsentation Wind TurbineMuhammad Ammad RasheedNessuna valutazione finora
- Load ShedDocumento2 pagineLoad Shedchemical engineerNessuna valutazione finora
- LV Generator Catalogue - Standard Marine EN LR 201205 PDFDocumento30 pagineLV Generator Catalogue - Standard Marine EN LR 201205 PDFPutra Kusuma HarditoNessuna valutazione finora
- Generators and Transformers: Prepared by M.Aruna / EeeDocumento11 pagineGenerators and Transformers: Prepared by M.Aruna / EeegssasiNessuna valutazione finora
- TB 01000001 eDocumento61 pagineTB 01000001 eRicardo LopezNessuna valutazione finora
- Alignment Technique - The Steam TurbineDocumento2 pagineAlignment Technique - The Steam TurbineRajeswar KulanjiNessuna valutazione finora
- BBC Last Stage Blades DesignDocumento12 pagineBBC Last Stage Blades Designantoniomambro100% (1)
- Turbine Governing SystemDocumento77 pagineTurbine Governing SystemGrishma WarkeNessuna valutazione finora
- Fgmo Rev WriteupDocumento4 pagineFgmo Rev Writeupsunil100% (1)
- Synchronous CondensersDocumento4 pagineSynchronous Condensersmvgonzalez2020Nessuna valutazione finora
- Steam Turbine Governing Systems OverviewDocumento11 pagineSteam Turbine Governing Systems Overviewdrmsrmurty80% (5)
- Puneet ppt22Documento17 paginePuneet ppt22sarafvivekNessuna valutazione finora
- DTC P0A94/553 DC/DC Converter Performance: Circuit DescriptionDocumento9 pagineDTC P0A94/553 DC/DC Converter Performance: Circuit Descriptionjermaine tobanNessuna valutazione finora
- ControllerDocumento66 pagineControllercristian faundesNessuna valutazione finora
- Mitsubishi FB16Documento67 pagineMitsubishi FB16Lada LabusNessuna valutazione finora
- Acu Pressure Affiliated Treatment CentersDocumento16 pagineAcu Pressure Affiliated Treatment CentershiralalnhpcNessuna valutazione finora
- Signals and System-Ramesh BabuDocumento120 pagineSignals and System-Ramesh BabuKishan Gupta57% (14)
- Himachal Main Himachal Main Page 9 PDFDocumento1 paginaHimachal Main Himachal Main Page 9 PDFhiralalnhpcNessuna valutazione finora
- Signals and System-Ramesh BabuDocumento120 pagineSignals and System-Ramesh BabuKishan Gupta57% (14)
- Advanced Engineering Mathematics 10th EditionDocumento63 pagineAdvanced Engineering Mathematics 10th EditionhiralalnhpcNessuna valutazione finora
- Edminister ElectricCircuitsDocumento297 pagineEdminister ElectricCircuitsdinesh_kp7647Nessuna valutazione finora
- Edminister ElectricCircuitsDocumento220 pagineEdminister ElectricCircuitshiralalnhpcNessuna valutazione finora
- Guess Paper Class 12 Maths Important QuestionsDocumento7 pagineGuess Paper Class 12 Maths Important Questionshiralalnhpc50% (2)
- Perspective 1& 2Documento39 paginePerspective 1& 2hiralalnhpcNessuna valutazione finora
- Council of Architecture National Aptitude Test in Architecture (NATA) 2018 Admit CardDocumento1 paginaCouncil of Architecture National Aptitude Test in Architecture (NATA) 2018 Admit CardhiralalnhpcNessuna valutazione finora
- 2015-16 Class Xi Chemistry Study Material PDFDocumento239 pagine2015-16 Class Xi Chemistry Study Material PDFhiralalnhpcNessuna valutazione finora
- 47 TS For Armoured 75 Ohm Coaxial Cable For PLCCDocumento8 pagine47 TS For Armoured 75 Ohm Coaxial Cable For PLCChiralalnhpcNessuna valutazione finora
- Application Configuration REB670Documento179 pagineApplication Configuration REB670hiralalnhpcNessuna valutazione finora
- Chapter - 5: Demarcation Between Corporate Office & Project PurchasesDocumento6 pagineChapter - 5: Demarcation Between Corporate Office & Project PurchaseshiralalnhpcNessuna valutazione finora
- PMG Wind Turbine May 2003 PDFDocumento48 paginePMG Wind Turbine May 2003 PDFhiralalnhpcNessuna valutazione finora
- 12 Iit Jee PDFDocumento180 pagine12 Iit Jee PDFPraveen MaramNessuna valutazione finora
- Husky Brochure-Web PDFDocumento31 pagineHusky Brochure-Web PDFhiralalnhpcNessuna valutazione finora
- Training Power System Protection AREVA PDFDocumento461 pagineTraining Power System Protection AREVA PDFhiralalnhpc100% (4)
- Conex 1 Wedge - 461® - 7.000 - 0.317 - P110-ICYDocumento1 paginaConex 1 Wedge - 461® - 7.000 - 0.317 - P110-ICYAnibal Perdomo SaldañaNessuna valutazione finora
- Eeguc Unit IDocumento28 pagineEeguc Unit IParventhan KannanNessuna valutazione finora
- PC2 - Practice Exam WorkedDocumento12 paginePC2 - Practice Exam WorkednomsyNessuna valutazione finora
- Torque Values RTJ (B16.5)Documento3 pagineTorque Values RTJ (B16.5)Dave Donohue100% (9)
- Volvo (Dem) and Haldex: History, Function, Diagnosis and RepairsDocumento6 pagineVolvo (Dem) and Haldex: History, Function, Diagnosis and RepairsNecsaszNorbertNessuna valutazione finora
- Den Co Close Control Product GuideDocumento40 pagineDen Co Close Control Product GuideJarwantoNessuna valutazione finora
- Conveyor BeltDocumento31 pagineConveyor BeltsmendozaNessuna valutazione finora
- List of Transferred ASME StandardsDocumento3 pagineList of Transferred ASME StandardsShakeel AhmedNessuna valutazione finora
- Seleccion de RejillaDocumento4 pagineSeleccion de RejillaCarlos Eduardo Arista FloresNessuna valutazione finora
- Swimming EquipmentsDocumento45 pagineSwimming EquipmentsHaymanAHMEDNessuna valutazione finora
- HMV 105-02 H2 42559 e 11.10 CDocumento9 pagineHMV 105-02 H2 42559 e 11.10 Cxxsh100% (2)
- Welding Symbols and NomenclatureDocumento17 pagineWelding Symbols and Nomenclaturesa saNessuna valutazione finora
- Geared Motor: Product ManualDocumento178 pagineGeared Motor: Product Manualsanjibkrjana100% (1)
- Din HandbooksDocumento9 pagineDin HandbooksTalha DikenNessuna valutazione finora
- Moog ServoMotors MDSeries Catalog enDocumento63 pagineMoog ServoMotors MDSeries Catalog enArsonval FleuryNessuna valutazione finora
- Quasiturbine EngineDocumento16 pagineQuasiturbine Engineapi-238832008100% (1)
- Oxygen Cylinder GuidanceDocumento1 paginaOxygen Cylinder GuidanceDarapu PrasanthiNessuna valutazione finora
- Steering Gear TestingDocumento9 pagineSteering Gear TestingArun GK100% (1)
- Cooling Tower SolutionDocumento38 pagineCooling Tower SolutionThabangNessuna valutazione finora
- Cutting Edges & End Bits: Bolt-On & Weld-In Cutting Edges For Buckets & BladesDocumento32 pagineCutting Edges & End Bits: Bolt-On & Weld-In Cutting Edges For Buckets & Blades8897477809Nessuna valutazione finora
- V Clic Workshop ManualDocumento44 pagineV Clic Workshop ManualWG-Friend IvybridgeNessuna valutazione finora
- (Hyundai Sonata 2005-2011, (Kia Forte 2009-2010, K5 2010-2011, Lotze 2010)Documento4 pagine(Hyundai Sonata 2005-2011, (Kia Forte 2009-2010, K5 2010-2011, Lotze 2010)marran almarranyNessuna valutazione finora
- Spreader BrommaDocumento414 pagineSpreader BrommamaloxNessuna valutazione finora
- Innovation by Experience: Lo Hacemos SencilloDocumento36 pagineInnovation by Experience: Lo Hacemos SencilloDejan DosljakNessuna valutazione finora
- PHD Thesis - Anthony Lo - 9 Dec 2014Documento264 paginePHD Thesis - Anthony Lo - 9 Dec 2014Hiei ArshavinNessuna valutazione finora
- Mechanical VibrationDocumento3 pagineMechanical VibrationChenNessuna valutazione finora
- Design of Forming ToolsDocumento22 pagineDesign of Forming ToolskunwarNessuna valutazione finora
- Experiment No.1 ObjectiveDocumento4 pagineExperiment No.1 ObjectivealiNessuna valutazione finora
- KinematicsDocumento7 pagineKinematicsNicole WheelerNessuna valutazione finora
- PARKER TGK/THK MotorDocumento36 paginePARKER TGK/THK MotorgugiNessuna valutazione finora