Potrebbero piacerti anche
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- Aeg-Dvd4535 Service ManualDocumento25 pagineAeg-Dvd4535 Service ManualSerp19720% (1)
- Getting Started Step7Ver5.5Documento33 pagineGetting Started Step7Ver5.5Dechatorn SubcharoenNessuna valutazione finora
- 2 E Power Electronics Electrical Machines Drive Technology ShortDocumento206 pagine2 E Power Electronics Electrical Machines Drive Technology ShortDechatorn Subcharoen0% (1)
- Lecture4 2Documento55 pagineLecture4 2Dechatorn SubcharoenNessuna valutazione finora
- 1 2SignalsSystems PDFDocumento7 pagine1 2SignalsSystems PDFDechatorn SubcharoenNessuna valutazione finora
- Lecture4 3 PDFDocumento17 pagineLecture4 3 PDFDechatorn SubcharoenNessuna valutazione finora
- Unit Step Function in MathcadDocumento6 pagineUnit Step Function in MathcadDechatorn SubcharoenNessuna valutazione finora
- Ch01 Introduction Compatibility ModeDocumento98 pagineCh01 Introduction Compatibility ModeDechatorn SubcharoenNessuna valutazione finora
- Esquema Arduino UNO R3Documento1 paginaEsquema Arduino UNO R3stangne1Nessuna valutazione finora
- BC337Documento3 pagineBC337Emanuele100% (2)
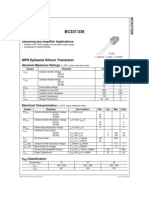
- NPN General Purpose Amplifier: Features & UseDocumento1 paginaNPN General Purpose Amplifier: Features & UseDechatorn SubcharoenNessuna valutazione finora
- Logcat Prev CSC LogDocumento129 pagineLogcat Prev CSC LogDaniels Emial ZarimarNessuna valutazione finora
- Lab 7 LRCDocumento4 pagineLab 7 LRCChristina Jean-Francois100% (1)
- Main characteristics of database approachDocumento17 pagineMain characteristics of database approachSaladAss GamingNessuna valutazione finora
- NetSure IPE Series - UpdateDocumento16 pagineNetSure IPE Series - UpdateEdgepoint TowersNessuna valutazione finora
- Infoblox Note Infoblox Ipam Integration With Microsoft Ad SitesDocumento2 pagineInfoblox Note Infoblox Ipam Integration With Microsoft Ad Sitesdas zobNessuna valutazione finora
- Practical UML™: A Hands-On Introduction For Developers: Use Case DiagramsDocumento17 paginePractical UML™: A Hands-On Introduction For Developers: Use Case Diagramsapi-3819971100% (1)
- LogDocumento18 pagineLogMuhammad Fauzi AbduiiahNessuna valutazione finora
- Manual de Usuario Tarjeta Madre GigaByte GA-990FXA-UD3 v.3.0Documento104 pagineManual de Usuario Tarjeta Madre GigaByte GA-990FXA-UD3 v.3.0Sexto SemestreNessuna valutazione finora
- Tune Servo Motor Gains Using LDCN OptimizerDocumento5 pagineTune Servo Motor Gains Using LDCN OptimizerIlhami DemirNessuna valutazione finora
- Media Provider Process Log AnalysisDocumento4 pagineMedia Provider Process Log AnalysisIlhaCikaRahimNessuna valutazione finora
- Foxboro FPS400 24 Manual 2016317141433Documento86 pagineFoxboro FPS400 24 Manual 2016317141433modsimcaNessuna valutazione finora
- Potentiometer and LVDTDocumento4 paginePotentiometer and LVDTAbhishek Kumar JaiswalNessuna valutazione finora
- Scanner For Drive Tests and I/Q Streaming: R&S®TSMW Universal Radio Network AnalyzerDocumento24 pagineScanner For Drive Tests and I/Q Streaming: R&S®TSMW Universal Radio Network AnalyzersaagNessuna valutazione finora
- OKI Memory Cross ReferenceDocumento13 pagineOKI Memory Cross Referenceกิจรุ่งเรือง โพจันNessuna valutazione finora
- PC-Based Object Simulator for Testing PLC Software DevelopmentDocumento6 paginePC-Based Object Simulator for Testing PLC Software DevelopmentGreg MavhungaNessuna valutazione finora
- CDJ-2000NXS: Multi PlayerDocumento158 pagineCDJ-2000NXS: Multi PlayerPaul CampbellNessuna valutazione finora
- Mf1S70Yyx/V1: 1. General DescriptionDocumento41 pagineMf1S70Yyx/V1: 1. General DescriptionPintér SándorNessuna valutazione finora
- INetsim SetupDocumento13 pagineINetsim SetupNguyen HoangNessuna valutazione finora
- VLSI Design Subject Notes on Structured Digital Circuits and SystemsDocumento9 pagineVLSI Design Subject Notes on Structured Digital Circuits and SystemsPranav ChaturvediNessuna valutazione finora
- Docs 09 5499 26 Batt Zigbee Green Power SpecificationDocumento189 pagineDocs 09 5499 26 Batt Zigbee Green Power SpecificationSang tae KimNessuna valutazione finora
- Smartplant ElectricalDocumento1 paginaSmartplant ElectricalGEETHA PUSHKARANNessuna valutazione finora
- Componet of A Computer SystemDocumento13 pagineComponet of A Computer System✬ SHANZA MALIK ✬Nessuna valutazione finora
- Red Hat Enterprise Linux-6-Performance Tuning Guide-En-USDocumento91 pagineRed Hat Enterprise Linux-6-Performance Tuning Guide-En-USprashrockNessuna valutazione finora
- Nota Ictl Tingkatan 1Documento1 paginaNota Ictl Tingkatan 1nnur_aimaniahNessuna valutazione finora
- Wdesk-G enDocumento9 pagineWdesk-G eniskandar ghinaNessuna valutazione finora
- Os Lab Manual AimlDocumento107 pagineOs Lab Manual Aimlpooja ppNessuna valutazione finora
- Lect1 OverviewDocumento35 pagineLect1 OverviewArchit BaglaNessuna valutazione finora
- Transmisor Can TJA 1055Documento27 pagineTransmisor Can TJA 1055Revelino Arenas PNessuna valutazione finora
- Tle/Tve/Tvl Packets: Food Technology Grade 8Documento8 pagineTle/Tve/Tvl Packets: Food Technology Grade 8francis john libo-onNessuna valutazione finora