Potrebbero piacerti anche
- NormalizationDocumento51 pagineNormalizationbabylin_1988100% (1)
- Quarter 2 Computer FinalDocumento4 pagineQuarter 2 Computer FinalJamaica A. SabellanoNessuna valutazione finora
- MultiMedia Computing 1Documento81 pagineMultiMedia Computing 1Hanar AhmedNessuna valutazione finora
- Chapter 02Documento32 pagineChapter 02NourhanGamalNessuna valutazione finora
- Application and Types of RobotsDocumento2 pagineApplication and Types of RobotsAnne MagcalasNessuna valutazione finora
- Lecture 4 Rapid Prototyping PDFDocumento75 pagineLecture 4 Rapid Prototyping PDFsafin kaosarNessuna valutazione finora
- Introduction To Data Base Management Systems SyllabusDocumento9 pagineIntroduction To Data Base Management Systems SyllabusIshika SinghalNessuna valutazione finora
- Chapter 3 (Module-2) Project Monitoring & Control 1Documento13 pagineChapter 3 (Module-2) Project Monitoring & Control 1Sabhaya ChiragNessuna valutazione finora
- Chapter 5 Graphic Communication p70-87Documento28 pagineChapter 5 Graphic Communication p70-87api-152132438Nessuna valutazione finora
- Fundamental Steps in Digital Image ProcessingDocumento2 pagineFundamental Steps in Digital Image ProcessingDebansu AndrEs Bhattacharya100% (2)
- Limit 2012 PDFDocumento54 pagineLimit 2012 PDFLava HimawanNessuna valutazione finora
- 411u1 - Multimedia 2D Animation and Web GraphicsDocumento19 pagine411u1 - Multimedia 2D Animation and Web GraphicsAjay KarthikNessuna valutazione finora
- Q4 Week5 6 - ANIMATIONDocumento13 pagineQ4 Week5 6 - ANIMATIONArthur ManaloNessuna valutazione finora
- Information and Media: Mark Jhon C. Oxillo Prepared byDocumento46 pagineInformation and Media: Mark Jhon C. Oxillo Prepared byHanie Pahm100% (1)
- Robotics 10 DLLDocumento7 pagineRobotics 10 DLLshover solisNessuna valutazione finora
- Quarter 2 Lesson 2Documento19 pagineQuarter 2 Lesson 2glencurit44Nessuna valutazione finora
- DCP ManualDocumento96 pagineDCP ManualSiva KumarNessuna valutazione finora
- Geographical Data Modeling: Longley Et Al., Ch. 8Documento47 pagineGeographical Data Modeling: Longley Et Al., Ch. 8Munajat NursaputraNessuna valutazione finora
- Dr. Ambedkar Institute of Technology: Under The Guidance ofDocumento6 pagineDr. Ambedkar Institute of Technology: Under The Guidance ofSushanth KengunteNessuna valutazione finora
- Channel Modelling For Vehicle To Vehicle CommunicationDocumento18 pagineChannel Modelling For Vehicle To Vehicle CommunicationshintogeorgekNessuna valutazione finora
- Quarter 1 Module 1 Week 1Documento34 pagineQuarter 1 Module 1 Week 1minaNessuna valutazione finora
- Perform The Instruction Stated in The Task Sheet 1.1.1 Before Proceeding To The Next ActivityDocumento6 paginePerform The Instruction Stated in The Task Sheet 1.1.1 Before Proceeding To The Next ActivityNan Mishael Bishor Navarro0% (1)
- Environment SetupDocumento15 pagineEnvironment Setuprusuraduionel22Nessuna valutazione finora
- Class VII-ICT Network & Communication-WK 2Documento3 pagineClass VII-ICT Network & Communication-WK 2shayan kashifNessuna valutazione finora
- MULTIMEDIADocumento28 pagineMULTIMEDIAJosh CasasNessuna valutazione finora
- Answer: B Answer: CDocumento13 pagineAnswer: B Answer: Cobiad83Nessuna valutazione finora
- Topic: A. Timeline in The History of RoboticsDocumento6 pagineTopic: A. Timeline in The History of RoboticsSalvador G. Yadao100% (1)
- Multimedia Authoring SystemDocumento56 pagineMultimedia Authoring SystemShyam BhatiyaNessuna valutazione finora
- Media and Information Literacy (MIL) - Lesson Exemplar 3Documento11 pagineMedia and Information Literacy (MIL) - Lesson Exemplar 3robejr2013Nessuna valutazione finora
- 3D Model Types Questions and Answers - SanfoundryDocumento8 pagine3D Model Types Questions and Answers - SanfoundryNilutpalNessuna valutazione finora
- 2d Animation TOSDocumento1 pagina2d Animation TOSYusop L AraliNessuna valutazione finora
- Chapter 2: Intel 8088/8086 MicroprocessorsDocumento37 pagineChapter 2: Intel 8088/8086 MicroprocessorsNgọc NinhNessuna valutazione finora
- CS6008-Human Computer InteractionDocumento10 pagineCS6008-Human Computer Interactiondeepan7787Nessuna valutazione finora
- PCB EngraverDocumento2 paginePCB EngraverFreddy Tituaña CadenaNessuna valutazione finora
- Communication and Leadership (ppt#3)Documento28 pagineCommunication and Leadership (ppt#3)Akbarjon AbdulkhamidovNessuna valutazione finora
- Midterm ExamDocumento8 pagineMidterm ExamMaster RedNessuna valutazione finora
- Empowerment Technologies Q2 Weeks 1 2Documento4 pagineEmpowerment Technologies Q2 Weeks 1 2Karmi Lj P. SaraosNessuna valutazione finora
- Computer ProgrammingDocumento21 pagineComputer ProgrammingPrabesh PokharelNessuna valutazione finora
- Massive Open Online Courses (Moocs) : by Madiope Jm..201209776 22 February 2014Documento13 pagineMassive Open Online Courses (Moocs) : by Madiope Jm..201209776 22 February 2014RaquelNessuna valutazione finora
- Robotics Midterm ReviewDocumento12 pagineRobotics Midterm ReviewGrayson SavageNessuna valutazione finora
- Project Scheduling - Probabilistic PERTDocumento23 pagineProject Scheduling - Probabilistic PERTDinesh VermaNessuna valutazione finora
- Mobile Robot ExperimentsDocumento177 pagineMobile Robot ExperimentsAashish TuplondheNessuna valutazione finora
- 611u1 - Multimedia 3d Animation Digital Sound Editing and CompositingDocumento19 pagine611u1 - Multimedia 3d Animation Digital Sound Editing and CompositingNihar ChalkeNessuna valutazione finora
- E TectDocumento15 pagineE TectjulzhaideNessuna valutazione finora
- EE663 Image Processing Histogram EqualizationDocumento38 pagineEE663 Image Processing Histogram Equalizationucantseeme0000Nessuna valutazione finora
- Human Computer Interaction: (Unit - II)Documento34 pagineHuman Computer Interaction: (Unit - II)Vinoth ChandrasekaranNessuna valutazione finora
- Media and Information Literacy 5 Types of MediaDocumento13 pagineMedia and Information Literacy 5 Types of Mediadana_pulidoNessuna valutazione finora
- 5g Vehicular Communication Seminar 2Documento24 pagine5g Vehicular Communication Seminar 2fatalukdarNessuna valutazione finora
- 1.3 The Positioning Concept of AutomationDocumento9 pagine1.3 The Positioning Concept of AutomationToy Yi YingNessuna valutazione finora
- Going Digital The Evolution of Marketing: Canlas, Jeraldine David, Criszia Mae de Leon, KarenDocumento45 pagineGoing Digital The Evolution of Marketing: Canlas, Jeraldine David, Criszia Mae de Leon, KarenCriszia Mae100% (1)
- Abstract For Robotic ArmDocumento4 pagineAbstract For Robotic ArmRounak VyasNessuna valutazione finora
- Multimedia Design and Development: Macromedia AuthorwareDocumento11 pagineMultimedia Design and Development: Macromedia AuthorwareDelugeNessuna valutazione finora
- 1 Quarter Exam, SY 2018-2019: Computer System ServicingDocumento2 pagine1 Quarter Exam, SY 2018-2019: Computer System ServicingChrist IanNessuna valutazione finora
- Report VHDL PDFDocumento31 pagineReport VHDL PDFShailesh PrajapatiNessuna valutazione finora
- Understanding Smart CitiesDocumento9 pagineUnderstanding Smart CitiesChandra GumelarNessuna valutazione finora
- Damped Free VibrationsDocumento44 pagineDamped Free VibrationsDhruva PatilNessuna valutazione finora
- Computer Lesson 1Documento11 pagineComputer Lesson 1jenchulichaeng blinkueNessuna valutazione finora
- Design, Simulations and Optimization of A Tracked Mobile Robot Manipulator With Hybrid Locomotion and Manipulation CapabilitiesDocumento6 pagineDesign, Simulations and Optimization of A Tracked Mobile Robot Manipulator With Hybrid Locomotion and Manipulation CapabilitiesIbrahim Ishaq KishimiNessuna valutazione finora
- Modeling and Analysis of A 6 DOF Robotic Arm Manipulator: January 2012Documento8 pagineModeling and Analysis of A 6 DOF Robotic Arm Manipulator: January 2012Bijay KumarNessuna valutazione finora
- Modeling and Analysis of A 6 DOF Robotic Arm Manipulator: January 2012Documento8 pagineModeling and Analysis of A 6 DOF Robotic Arm Manipulator: January 2012Georgiana BunghiuzNessuna valutazione finora
- Robot Mechanics and Control RIME-811: Dr. Hasan SajidDocumento34 pagineRobot Mechanics and Control RIME-811: Dr. Hasan SajidTalha YousufNessuna valutazione finora
- RM PDFDocumento1 paginaRM PDFTalha YousufNessuna valutazione finora
- Literature Search On Hybrid Brain Computer Interface Using EEG and fNIRSDocumento10 pagineLiterature Search On Hybrid Brain Computer Interface Using EEG and fNIRSTalha YousufNessuna valutazione finora
- Foundations of Artificial Intelligence: Cis20.2-Spring2010-Sklar-Leciv.1 1 Cis20.2-Spring2010-Sklar-Leciv.1 2Documento6 pagineFoundations of Artificial Intelligence: Cis20.2-Spring2010-Sklar-Leciv.1 1 Cis20.2-Spring2010-Sklar-Leciv.1 2Talha YousufNessuna valutazione finora
- Binomial Distribution and ApplicationsDocumento1 paginaBinomial Distribution and ApplicationsTalha YousufNessuna valutazione finora
- Project ReportDocumento1 paginaProject ReportTalha YousufNessuna valutazione finora
- Data SetDocumento1.206 pagineData SetTalha YousufNessuna valutazione finora
- Bayesian Nonparametrics and The Probabilistic Approach To ModellingDocumento27 pagineBayesian Nonparametrics and The Probabilistic Approach To ModellingTalha YousufNessuna valutazione finora
- Arduino TimersDocumento31 pagineArduino TimersTalha YousufNessuna valutazione finora
- Time and Motion: Dr. Hasan SajidDocumento36 pagineTime and Motion: Dr. Hasan SajidTalha YousufNessuna valutazione finora
- Support Vector Machines PDFDocumento37 pagineSupport Vector Machines PDFTalha YousufNessuna valutazione finora
- Time and Motion: Dr. Hasan SajidDocumento33 pagineTime and Motion: Dr. Hasan SajidTalha YousufNessuna valutazione finora
- CourseraProgWeek1Instruction PDFDocumento2 pagineCourseraProgWeek1Instruction PDFTalha YousufNessuna valutazione finora
- Chapter 3 - Support Vector Machine With Math. - Deep Math Machine Learning - Ai - MediumDocumento11 pagineChapter 3 - Support Vector Machine With Math. - Deep Math Machine Learning - Ai - MediumTalha YousufNessuna valutazione finora
- List of Agreed Restaurants PDFDocumento7 pagineList of Agreed Restaurants PDFTalha YousufNessuna valutazione finora
- How Do I Choose A Graduate SchoolDocumento2 pagineHow Do I Choose A Graduate SchoolTalha YousufNessuna valutazione finora
- Lec 1Documento10 pagineLec 1Talha YousufNessuna valutazione finora
- SVM Tutorial: SVM - Understanding The Math - The Optimal HyperplaneDocumento13 pagineSVM Tutorial: SVM - Understanding The Math - The Optimal HyperplaneTalha YousufNessuna valutazione finora
- Course Code Credit Hours Courses DescriptionDocumento2 pagineCourse Code Credit Hours Courses DescriptionTalha YousufNessuna valutazione finora
- Recommendation LetterDocumento4 pagineRecommendation LetterTalha YousufNessuna valutazione finora
- Literature ReviewDocumento11 pagineLiterature ReviewTalha YousufNessuna valutazione finora
- Top 101 High Frequency GRE Words - CrunchPrep GREDocumento12 pagineTop 101 High Frequency GRE Words - CrunchPrep GRETalha Yousuf100% (2)
- Sample Email & Reference LetterDocumento2 pagineSample Email & Reference LetterTalha YousufNessuna valutazione finora
- Official Translators, Updated 15-July-2015Documento2 pagineOfficial Translators, Updated 15-July-2015Talha YousufNessuna valutazione finora
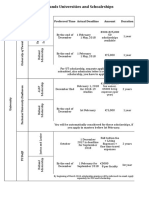
- Netherlands Universities and Schoalrships: Preferred Time Actual Deadline Amount DurationDocumento1 paginaNetherlands Universities and Schoalrships: Preferred Time Actual Deadline Amount DurationTalha YousufNessuna valutazione finora
- U15 QuestionsDocumento2 pagineU15 Questionsapi-248642018Nessuna valutazione finora
- Problem 709 - Propped Beam With Spring Support: Stone Crusher Price ListDocumento2 pagineProblem 709 - Propped Beam With Spring Support: Stone Crusher Price Listmeda012Nessuna valutazione finora
- SwissDocumento8 pagineSwissRajaram RamanNessuna valutazione finora
- Sae J500 EstriadosDocumento2 pagineSae J500 EstriadosMarcel Dandaro100% (1)
- "JD" Series Pulling Tool: 4Jdc Operation ManualDocumento4 pagine"JD" Series Pulling Tool: 4Jdc Operation Manualsong Li100% (1)
- Chassis Design Report PDFDocumento8 pagineChassis Design Report PDFPrakhar YadavNessuna valutazione finora
- SENR33120001 621E and 627E Tractor-Scraper Hydraulic System (SENR3312)Documento2 pagineSENR33120001 621E and 627E Tractor-Scraper Hydraulic System (SENR3312)CEVegaONessuna valutazione finora
- CF L3 84 EE66011542888876-1Documento8 pagineCF L3 84 EE66011542888876-1Mauli Dudhmogare PatilNessuna valutazione finora
- Schwing SP 500 EnglishDocumento222 pagineSchwing SP 500 EnglishManuel Andres Manrique Lopez92% (12)
- Fleetguard Recycled Coolant: Fleetcool™ Recycled EG PremixDocumento48 pagineFleetguard Recycled Coolant: Fleetcool™ Recycled EG PremixCesar G.Nessuna valutazione finora
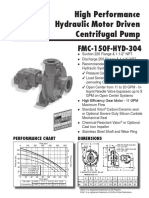
- FMC-150F-HYD-304 - 04-13 Bomba AceDocumento2 pagineFMC-150F-HYD-304 - 04-13 Bomba AceEmerson GomesNessuna valutazione finora
- Mission Centrifugal PumpsDocumento60 pagineMission Centrifugal PumpsWell Site Ranger100% (2)
- Bellows Sealed Matering Valves BM Series (Ms-01-23) R3Documento4 pagineBellows Sealed Matering Valves BM Series (Ms-01-23) R3herysyam1980Nessuna valutazione finora
- Hoja Técnica Roto Xtend Duty Fluid PDFDocumento2 pagineHoja Técnica Roto Xtend Duty Fluid PDFFederico Liaudat100% (2)
- 0K4291-E SG 100 9.0L INDUSTRIAL H-100 9 Sep 2017 PDFDocumento6 pagine0K4291-E SG 100 9.0L INDUSTRIAL H-100 9 Sep 2017 PDFGustavoCalderonNessuna valutazione finora
- TANCO 1400EH-2014-EnglishDocumento116 pagineTANCO 1400EH-2014-EnglishErwin GerdingNessuna valutazione finora
- Basics of Foundation Engineering With Solved ProblemsDocumento274 pagineBasics of Foundation Engineering With Solved ProblemsSuir Isahu100% (2)
- Mobiscreen Ms 702 - Ms 703 - Ms 952 - Ms 953 Evo: Feed HopperDocumento2 pagineMobiscreen Ms 702 - Ms 703 - Ms 952 - Ms 953 Evo: Feed HopperTEKLEWEYNI TsegayNessuna valutazione finora
- Theory of Plates Mechanic of MaterialDocumento25 pagineTheory of Plates Mechanic of MaterialisafeeneyNessuna valutazione finora
- Cooling Tower SolutionDocumento38 pagineCooling Tower SolutionThabangNessuna valutazione finora
- Eccentric ConnecctionsDocumento41 pagineEccentric ConnecctionsShyam Suryawanshi100% (1)
- √ nρs) fc': Uncracked sectionDocumento5 pagine√ nρs) fc': Uncracked sectionSPDQC EngineeringNessuna valutazione finora
- TRF InspectionDocumento15 pagineTRF InspectionSonny RaymundoNessuna valutazione finora
- Komal Kumar Mallick PDFDocumento2 pagineKomal Kumar Mallick PDFKomal KumarNessuna valutazione finora
- Installation, Operation and Maintenance Instructions Stainless Steel, Liquid Ring Vacuum PumpsDocumento28 pagineInstallation, Operation and Maintenance Instructions Stainless Steel, Liquid Ring Vacuum PumpspinplataNessuna valutazione finora
- AGCO Power Gensets Land V2Documento2 pagineAGCO Power Gensets Land V2Tawfiq ZidanNessuna valutazione finora
- Datasheet (API 610 - 1 Page)Documento8 pagineDatasheet (API 610 - 1 Page)Rudin Fahrudin RahmanNessuna valutazione finora
- ROHR2fesu FeaturelistDocumento20 pagineROHR2fesu FeaturelistJohan ConradieNessuna valutazione finora
- RT Report Format Rev.1 17-3-19Documento6 pagineRT Report Format Rev.1 17-3-19mohd as shahiddin jafriNessuna valutazione finora
- 下载Documento4 pagine下载Mars JackNessuna valutazione finora