Potrebbero piacerti anche
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Mercruiser Service Manual #14 Alpha I Gen II Outdrives 1991-NewerDocumento715 pagineMercruiser Service Manual #14 Alpha I Gen II Outdrives 1991-NewerM5Melo100% (10)
- ThaiREC Checklist-Barge Inspection Questionnaire GasDocumento18 pagineThaiREC Checklist-Barge Inspection Questionnaire Gasเปีย วันชัย สวนทอง100% (1)
- 1010 Tire ChangerDocumento4 pagine1010 Tire ChangerReyes Cesar33% (3)
- E-Health Care ManagementDocumento92 pagineE-Health Care ManagementbsudheertecNessuna valutazione finora
- Kohler 14 20 RES Parts Manual TP 6806 2016 06Documento76 pagineKohler 14 20 RES Parts Manual TP 6806 2016 06peleniusNessuna valutazione finora
- Procedure For Field Joint CoatingDocumento10 pagineProcedure For Field Joint CoatingM Waqas HabibNessuna valutazione finora
- ASHRAE Fundamentals 2005 - SI Units - Extract of Tables PDFDocumento40 pagineASHRAE Fundamentals 2005 - SI Units - Extract of Tables PDFSufian SarwarNessuna valutazione finora
- CSG CMT CalculationsDocumento5 pagineCSG CMT Calculationsfrancisryan4519Nessuna valutazione finora
- Trends and Research Issues in SOA Validation: January 2011Documento23 pagineTrends and Research Issues in SOA Validation: January 2011bsudheertecNessuna valutazione finora
- M.E (FT) 2021 Regulation-Cse SyllabusDocumento88 pagineM.E (FT) 2021 Regulation-Cse SyllabusbsudheertecNessuna valutazione finora
- Smart Social Distancing TechniqueDocumento86 pagineSmart Social Distancing TechniquebsudheertecNessuna valutazione finora
- SPPM Unit 1Documento11 pagineSPPM Unit 1bsudheertecNessuna valutazione finora
- M.E (FT) 2021 Regulation-Ece SyllabusDocumento64 pagineM.E (FT) 2021 Regulation-Ece SyllabusbsudheertecNessuna valutazione finora
- Question Paper Code:: Reg. No.Documento2 pagineQuestion Paper Code:: Reg. No.bsudheertecNessuna valutazione finora
- HW3 Sol PDFDocumento44 pagineHW3 Sol PDFbsudheertecNessuna valutazione finora
- CS8261 - C Programming Laboratory - MCQDocumento6 pagineCS8261 - C Programming Laboratory - MCQbsudheertecNessuna valutazione finora
- CS554 - Advanced Database Systems Homework 8: Undo-Log RecordsDocumento15 pagineCS554 - Advanced Database Systems Homework 8: Undo-Log RecordsbsudheertecNessuna valutazione finora
- Markov Decision Processes: - The Markov Property - The Markov Decision Process - Partially Observable MdpsDocumento24 pagineMarkov Decision Processes: - The Markov Property - The Markov Decision Process - Partially Observable MdpsbsudheertecNessuna valutazione finora
- MDP PDFDocumento37 pagineMDP PDFbsudheertecNessuna valutazione finora
- Academic Allotments PDFDocumento259 pagineAcademic Allotments PDFbsudheertecNessuna valutazione finora
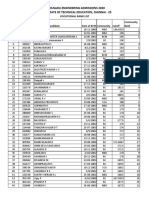
- Tamilnadu Engineering Admissions 2020 Directorate of Technical Education, Chennai - 25Documento35 pagineTamilnadu Engineering Admissions 2020 Directorate of Technical Education, Chennai - 25bsudheertecNessuna valutazione finora
- Waside Graphs PDFDocumento4 pagineWaside Graphs PDFbsudheertecNessuna valutazione finora
- Deepiris: Iris Recognition Using A Deep Learning ApproachDocumento4 pagineDeepiris: Iris Recognition Using A Deep Learning ApproachbsudheertecNessuna valutazione finora
- Index PDFDocumento19 pagineIndex PDFbsudheertecNessuna valutazione finora
- Pipeline Review: Here Is The Example Instruction Sequence Used To Illustrate Pipelining On The Previous PageDocumento11 paginePipeline Review: Here Is The Example Instruction Sequence Used To Illustrate Pipelining On The Previous PagebsudheertecNessuna valutazione finora
- Problem Set 4 SolDocumento14 pagineProblem Set 4 SolbsudheertecNessuna valutazione finora
- I. What Comes Before: Srimathi Sundaravalli Memorial SchoolDocumento2 pagineI. What Comes Before: Srimathi Sundaravalli Memorial SchoolbsudheertecNessuna valutazione finora
- Hazards: CSE378 W, 2001 CSE378 W, 2001Documento6 pagineHazards: CSE378 W, 2001 CSE378 W, 2001bsudheertecNessuna valutazione finora
- Quiz2 Soln spr12 PDFDocumento2 pagineQuiz2 Soln spr12 PDFbsudheertecNessuna valutazione finora
- Midterm1 Soln Fall09 PDFDocumento6 pagineMidterm1 Soln Fall09 PDFbsudheertecNessuna valutazione finora
- ECE 341 Final Exam Solution: Problem No. 1 (10 Points)Documento9 pagineECE 341 Final Exam Solution: Problem No. 1 (10 Points)bsudheertecNessuna valutazione finora
- A C +Haier+12000+BTUDocumento51 pagineA C +Haier+12000+BTUfox7878Nessuna valutazione finora
- First-Man-Up User ManualDocumento24 pagineFirst-Man-Up User ManualJoshuaNessuna valutazione finora
- Writer Keyboard Shortcuts CheatsheetDocumento1 paginaWriter Keyboard Shortcuts CheatsheetBrian100% (3)
- MMTI Literature ReviewDocumento39 pagineMMTI Literature ReviewGargee GhoshNessuna valutazione finora
- Presented By:: Rafi Sheikh Sheeraz Malik Syed Ahmed Ali Umair Ali Waqar AmeenDocumento34 paginePresented By:: Rafi Sheikh Sheeraz Malik Syed Ahmed Ali Umair Ali Waqar AmeenSyed Ahmed AliNessuna valutazione finora
- A Review Paper On Effect of Varying Welding Heat Input On Microstructure, Mech Properties and Corrosion Behaviors of Ferritic SS & Mild Steel PDFDocumento5 pagineA Review Paper On Effect of Varying Welding Heat Input On Microstructure, Mech Properties and Corrosion Behaviors of Ferritic SS & Mild Steel PDFMursidil KamilNessuna valutazione finora
- CSC 263Documento108 pagineCSC 263osecaloNessuna valutazione finora
- Section 1: Identification: TurpentineDocumento10 pagineSection 1: Identification: TurpentineRobertNessuna valutazione finora
- X2 / 275 Vac: B 81 191 EMI Suppression CapacitorsDocumento4 pagineX2 / 275 Vac: B 81 191 EMI Suppression CapacitorsMeg YorkNessuna valutazione finora
- Hindalco Aluminium Catalogue PDFDocumento4 pagineHindalco Aluminium Catalogue PDFVansu Saini0% (1)
- British Columbia Institut of TechnologyDocumento2 pagineBritish Columbia Institut of Technologyrobertofca2266Nessuna valutazione finora
- Technical InformationDocumento8 pagineTechnical Informationmyusuf_engineerNessuna valutazione finora
- RIL AGM Presentation SlidesDocumento44 pagineRIL AGM Presentation SlidesDeshGujaratNessuna valutazione finora
- 592-A2GA DesbloqueadoDocumento27 pagine592-A2GA DesbloqueadoVicktor GranadosNessuna valutazione finora
- XCMG Construction Machinery Co., LTDDocumento4 pagineXCMG Construction Machinery Co., LTD余Nessuna valutazione finora
- UntitledDocumento34 pagineUntitledRayudu VVSNessuna valutazione finora
- Hazard-Identification Dec 2015Documento22 pagineHazard-Identification Dec 2015Dumitru EninNessuna valutazione finora
- Genetic AlgorithmDocumento6 pagineGenetic AlgorithmShashikant ChaurasiaNessuna valutazione finora
- Smart Obj. Kiss and SwotDocumento5 pagineSmart Obj. Kiss and SwotjtopuNessuna valutazione finora
- Manual Técnico Sony HDC-DX70Documento72 pagineManual Técnico Sony HDC-DX70Cristian MoraisNessuna valutazione finora
- GMSYS Release NotesDocumento2 pagineGMSYS Release NotesrenzoquimNessuna valutazione finora
- Bomba de Vácuo Sotorbilt 4mrDocumento12 pagineBomba de Vácuo Sotorbilt 4mrWormInchNessuna valutazione finora
- OK Flux 231 (F7AZ-EL12) PDFDocumento2 pagineOK Flux 231 (F7AZ-EL12) PDFborovniskiNessuna valutazione finora