Potrebbero piacerti anche
- TechRef StationController PDFDocumento28 pagineTechRef StationController PDFmalecad0% (1)
- 2015 - Rectifier-Inverter Technical Reference DIgSILENT PowerFactoryDocumento24 pagine2015 - Rectifier-Inverter Technical Reference DIgSILENT PowerFactoryAaron CrucesNessuna valutazione finora
- PowerFactory TechRef - Grid-Forming - ConverterDocumento12 paginePowerFactory TechRef - Grid-Forming - ConverterАлександр100% (1)
- Digsilent Powerfactory: Technical Reference DocumentationDocumento39 pagineDigsilent Powerfactory: Technical Reference DocumentationROYNessuna valutazione finora
- TechRef 3-W-Transformer 3phaseDocumento40 pagineTechRef 3-W-Transformer 3phaseTorrez JeanNessuna valutazione finora
- TechRef StaticGeneratorDocumento31 pagineTechRef StaticGeneratoradderlyhuertaNessuna valutazione finora
- The Technology of Instrument Transformers: Current and Voltage Measurement and Insulation SystemsDa EverandThe Technology of Instrument Transformers: Current and Voltage Measurement and Insulation SystemsNessuna valutazione finora
- Powerfactory: DigsilentDocumento12 paginePowerfactory: DigsilentaramirezbenitesNessuna valutazione finora
- Siemens 7SJ63Documento15 pagineSiemens 7SJ63David Rodrigo RodrigoNessuna valutazione finora
- DIgSILENT TechRef Common ImpedanceDocumento8 pagineDIgSILENT TechRef Common ImpedanceАлишер ГалиевNessuna valutazione finora
- TechRef Overhead Line ModelsDocumento12 pagineTechRef Overhead Line ModelsLalo PatoNessuna valutazione finora
- Digsilent Powerfactory: Technical Reference DocumentationDocumento11 pagineDigsilent Powerfactory: Technical Reference DocumentationVladimirCoelloNessuna valutazione finora
- Debugging PDFDocumento8 pagineDebugging PDFEdwin BaezNessuna valutazione finora
- PowerFactory TechRef - DFIGDocumento17 paginePowerFactory TechRef - DFIGАлександрNessuna valutazione finora
- TechRef StaticVarSystemDocumento23 pagineTechRef StaticVarSystemAlexNessuna valutazione finora
- PowerFactory TechRef - FRCDocumento14 paginePowerFactory TechRef - FRCАлександр100% (1)
- DSSD dtsd2818 Multifunction Meter Operating InstructionsDocumento52 pagineDSSD dtsd2818 Multifunction Meter Operating InstructionsMujahid Ahmed FadelNessuna valutazione finora
- PowerFactory TechRef - IEC61400-27-1Documento13 paginePowerFactory TechRef - IEC61400-27-1Александр100% (1)
- Digsilent Powerfactory: Relay Model DescriptionDocumento15 pagineDigsilent Powerfactory: Relay Model DescriptionRubénDarioNessuna valutazione finora
- Fortran Code For Rectifier PSCADDocumento12 pagineFortran Code For Rectifier PSCADmaneeshkNessuna valutazione finora
- Optimum Location and Size of Capacitor Bank in Distribution SystemDocumento10 pagineOptimum Location and Size of Capacitor Bank in Distribution SystemsurajNessuna valutazione finora
- Digsilent Powerfactory: Technical Reference DocumentationDocumento15 pagineDigsilent Powerfactory: Technical Reference Documentationbeimar heredia saiguaNessuna valutazione finora
- CAB-15-003 Issue 8 With DrawingsDocumento23 pagineCAB-15-003 Issue 8 With DrawingsmuratucobanNessuna valutazione finora
- MasterThesis Basem Idlbi (Documento119 pagineMasterThesis Basem Idlbi (GuruxyzNessuna valutazione finora
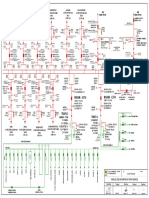
- Nissin - Gt14 Nissin - Gt14: BUS 150 KV (2000A) Bus A Bus BDocumento1 paginaNissin - Gt14 Nissin - Gt14: BUS 150 KV (2000A) Bus A Bus BirfanNessuna valutazione finora
- StudyDocumento87 pagineStudymazzoffaNessuna valutazione finora
- P1567 AIT Wechselrichter RevD enDocumento18 pagineP1567 AIT Wechselrichter RevD enJonathan Sebastian SalinasNessuna valutazione finora
- WhatsNew 2020 enDocumento49 pagineWhatsNew 2020 enVigneshwaran KandaswamyNessuna valutazione finora
- ABB Load Shedding CBDocumento32 pagineABB Load Shedding CBkalos stratiotesNessuna valutazione finora
- Power System Stabliser: A ReviewDocumento71 paginePower System Stabliser: A ReviewPiyush AgnihotriNessuna valutazione finora
- A Method For Tuning Models-DIgSILENT PDFDocumento8 pagineA Method For Tuning Models-DIgSILENT PDFJaol1976Nessuna valutazione finora
- PD521Documento16 paginePD521bauhaus10Nessuna valutazione finora
- NSM Cubicle With T200SDocumento38 pagineNSM Cubicle With T200SThức Võ100% (2)
- Insulation Coordination Study Study CasesDocumento6 pagineInsulation Coordination Study Study CasesErsi AgoNessuna valutazione finora
- Introduction To Electromagnetic Transient Analysis of Power SystemsDocumento8 pagineIntroduction To Electromagnetic Transient Analysis of Power Systemsअंकित अरोड़ाNessuna valutazione finora
- P3T32 en M J006 ANSI Web PDFDocumento426 pagineP3T32 en M J006 ANSI Web PDFBruce NationNessuna valutazione finora
- PowerFactory EMT Model3Documento6 paginePowerFactory EMT Model3Ratana KemNessuna valutazione finora
- Modelling of Distributed Energy Resources With ATP-EMTPDocumento9 pagineModelling of Distributed Energy Resources With ATP-EMTPPhùng TuấnNessuna valutazione finora
- PF With Python in DigsilentDocumento2 paginePF With Python in DigsilentYuteeNessuna valutazione finora
- Relay IndexDocumento15 pagineRelay IndexDavid Rodrigo RodrigoNessuna valutazione finora
- DIgSILENT UserManual 2019 enDocumento1.253 pagineDIgSILENT UserManual 2019 enSuwicha Sokul100% (1)
- PSLF User's ManualDocumento2.187 paginePSLF User's ManualnoahNessuna valutazione finora
- Advc2-3001advc Custom Logic Tool r1.1 WebDocumento36 pagineAdvc2-3001advc Custom Logic Tool r1.1 WebNguyen Minh Tri100% (1)
- SL3000 - 113-General SpecificationDocumento37 pagineSL3000 - 113-General SpecificationRadu IonutNessuna valutazione finora
- Overcurrent Relay Coordination For Phase and Earth Foults Using EtapDocumento4 pagineOvercurrent Relay Coordination For Phase and Earth Foults Using EtapHimdad TahirNessuna valutazione finora
- Power System Stabilizers For The Synchronous Generator: Tuning and Performance EvaluationDocumento78 paginePower System Stabilizers For The Synchronous Generator: Tuning and Performance EvaluationVikas PatelNessuna valutazione finora
- CA08100018E Vol15 IbookDocumento166 pagineCA08100018E Vol15 IbookamericoNessuna valutazione finora
- Modeling, Simulation and Control of D-Statcom Using Atp/EmtpDocumento4 pagineModeling, Simulation and Control of D-Statcom Using Atp/EmtpKalyan SrinivasNessuna valutazione finora
- CYMGRD 6.3 For Windows: User'S Guide and Reference ManualDocumento141 pagineCYMGRD 6.3 For Windows: User'S Guide and Reference ManualJhon100% (1)
- Representative Static Load Models For TransientDocumento10 pagineRepresentative Static Load Models For TransientNirmal mehtaNessuna valutazione finora
- Neplan Selectivity Analysis v42Documento43 pagineNeplan Selectivity Analysis v42alex100% (1)
- FOLD presentation-WAMSDocumento41 pagineFOLD presentation-WAMShemanth727Nessuna valutazione finora
- DigSilent TechRef - RelDispolyDocumento50 pagineDigSilent TechRef - RelDispolyАлишер ГалиевNessuna valutazione finora
- DIgSILENT TechRef FFTDocumento13 pagineDIgSILENT TechRef FFTАлишер ГалиевNessuna valutazione finora
- TechRef Cable ModellingDocumento8 pagineTechRef Cable ModellingxolraxNessuna valutazione finora
- IntelliRupter PulseCloserDocumento24 pagineIntelliRupter PulseCloserThai TranNessuna valutazione finora
- Real-Time Simulation Technology for Modern Power ElectronicsDa EverandReal-Time Simulation Technology for Modern Power ElectronicsNessuna valutazione finora
- TechRef 2 W Transformer 3phaseDocumento57 pagineTechRef 2 W Transformer 3phaseROYNessuna valutazione finora
- TechRef 3 W TransformerDocumento24 pagineTechRef 3 W TransformerROYNessuna valutazione finora
- TechRef 3 W TransformerDocumento22 pagineTechRef 3 W TransformerbalboinoNessuna valutazione finora
- National Institute of Technology Kurukshetra: Matlab Programming ReportDocumento19 pagineNational Institute of Technology Kurukshetra: Matlab Programming ReportZokiNessuna valutazione finora
- END End Testing: Rick G. Asche, PEDocumento11 pagineEND End Testing: Rick G. Asche, PEZokiNessuna valutazione finora
- Mathcad MatrixDocumento18 pagineMathcad MatrixZokiNessuna valutazione finora
- Hands On Relay School 2019: Event AnalysisDocumento40 pagineHands On Relay School 2019: Event AnalysisZokiNessuna valutazione finora
- D22 Final 4-18-12 PDFDocumento26 pagineD22 Final 4-18-12 PDFZokiNessuna valutazione finora
- 6261 ConsiderUsingHarmonic KB 20061019 WebDocumento18 pagine6261 ConsiderUsingHarmonic KB 20061019 WebZokiNessuna valutazione finora
- 15eel76 PSS Lab ManualDocumento31 pagine15eel76 PSS Lab ManualZoki50% (2)
- Wind 2 Short CircuitDocumento2 pagineWind 2 Short CircuitZokiNessuna valutazione finora
- Unfaulted Unearthed NetworkDocumento14 pagineUnfaulted Unearthed NetworkZokiNessuna valutazione finora
- 7XV5652 Catalog SIP2004s enDocumento2 pagine7XV5652 Catalog SIP2004s enZokiNessuna valutazione finora
- Siemens 7UT512 RIOConverterDocumento10 pagineSiemens 7UT512 RIOConverterZokiNessuna valutazione finora
- 00 SEP-700 Register Binder BDocumento2 pagine00 SEP-700 Register Binder BZokiNessuna valutazione finora
- Siemens 7Sd52 Powerfactory Relay Model Description: Digsilent Technical DocumentationDocumento6 pagineSiemens 7Sd52 Powerfactory Relay Model Description: Digsilent Technical DocumentationZokiNessuna valutazione finora
- Guide: New Models VIN Decoder Up Front Many Additions..Documento157 pagineGuide: New Models VIN Decoder Up Front Many Additions..ZokiNessuna valutazione finora
- Infeed EffectDocumento1 paginaInfeed EffectZokiNessuna valutazione finora
- Guide: New Models VIN Decoder Up Front Many Additions..Documento157 pagineGuide: New Models VIN Decoder Up Front Many Additions..ZokiNessuna valutazione finora
- Service Information 7SA513 V3.31 /FF... Firmware Update With Loading ProgramDocumento6 pagineService Information 7SA513 V3.31 /FF... Firmware Update With Loading ProgramZokiNessuna valutazione finora
- Readme PDFDocumento6 pagineReadme PDFZokiNessuna valutazione finora
- General Physics 2 Performance Task (3 Quarter)Documento2 pagineGeneral Physics 2 Performance Task (3 Quarter)christie villaNessuna valutazione finora
- Especificaciones Tetra BaseDocumento3 pagineEspecificaciones Tetra BasepedroaNessuna valutazione finora
- Manual Motor de Arranque Tesys HDocumento20 pagineManual Motor de Arranque Tesys Hmada2409Nessuna valutazione finora
- Biographical Recount TextDocumento1 paginaBiographical Recount TextRafi DaffaNessuna valutazione finora
- Single-Phase SSR With Detachable Heatsink: SR1 SeriesDocumento2 pagineSingle-Phase SSR With Detachable Heatsink: SR1 Seriestechnical supportNessuna valutazione finora
- Thermocouple: From Wikipedia, The Free EncyclopediaDocumento9 pagineThermocouple: From Wikipedia, The Free EncyclopediaKiệt Huỳnh AnhNessuna valutazione finora
- Diagrama de Genius SP Hf1800aDocumento16 pagineDiagrama de Genius SP Hf1800aИегҵ Гемассне100% (4)
- Hydrastep & Hydratect: Water/steam Monitoring SystemsDocumento8 pagineHydrastep & Hydratect: Water/steam Monitoring SystemsSrinivasarao YenigallaNessuna valutazione finora
- The Recycling Folded CascodeDocumento8 pagineThe Recycling Folded CascodeFelipe BertonNessuna valutazione finora
- Electrical Safety ONS 09 0 PR 4016 - R1Documento21 pagineElectrical Safety ONS 09 0 PR 4016 - R1Ehsan YarmohammadiNessuna valutazione finora
- MAKE 18 Light BrickDocumento10 pagineMAKE 18 Light BrickDumitrescu Leonard CezarNessuna valutazione finora
- Antoniou Realisation of Gyratqrs Using Operational AmplifiersDocumento13 pagineAntoniou Realisation of Gyratqrs Using Operational Amplifiersbenitogaldos19gmail.comNessuna valutazione finora
- E Series Catalogue & White Paper N00-803-03Documento44 pagineE Series Catalogue & White Paper N00-803-03Fabio Moncada Montoya100% (1)
- Review of Diagnosis of Faults in Induction MotorDocumento5 pagineReview of Diagnosis of Faults in Induction Motorprasad dholeNessuna valutazione finora
- Ultra Isolation TransformerDocumento2 pagineUltra Isolation TransformerKhashane Willy MohaleNessuna valutazione finora
- Low-Voltage Electrical Power Conductors and Cables PDFDocumento9 pagineLow-Voltage Electrical Power Conductors and Cables PDFJairo WilchesNessuna valutazione finora
- EKM Metering EKM-15E 120 Volt Meter Spec SheetDocumento2 pagineEKM Metering EKM-15E 120 Volt Meter Spec SheetAdam BrouwerNessuna valutazione finora
- Rambus Question Paper - Iisc 2007: D Q TCQ 0 D Q TCQ 0 Comb - LogicDocumento4 pagineRambus Question Paper - Iisc 2007: D Q TCQ 0 D Q TCQ 0 Comb - Logicraghu dNessuna valutazione finora
- Product Catalog: Low-Voltage MotorsDocumento65 pagineProduct Catalog: Low-Voltage MotorsAlekseyNessuna valutazione finora
- ATF1502ASDocumento18 pagineATF1502ASAline X Arthur FrancoNessuna valutazione finora
- Material Take Off Mto Site Facilities Existing To Lay DownDocumento5 pagineMaterial Take Off Mto Site Facilities Existing To Lay DownLiondo PurbaNessuna valutazione finora
- 78eff6 PDFDocumento2 pagine78eff6 PDFTito NuñezNessuna valutazione finora
- TASCAM MM-1 Keyboard MixerDocumento33 pagineTASCAM MM-1 Keyboard MixerDanderman12375% (4)
- U17739EJ2V0AN00Documento195 pagineU17739EJ2V0AN00Trelaj IstvánNessuna valutazione finora
- p203 PDFDocumento7 paginep203 PDFMehmood Khan MarwatNessuna valutazione finora
- ChromagenDocumento44 pagineChromagenNicole WintNessuna valutazione finora
- RC Circuit LabDocumento3 pagineRC Circuit LabSail338Nessuna valutazione finora
- 22.electromotive Force and Potential DifferenceDocumento4 pagine22.electromotive Force and Potential DifferenceSyed Mairaj Ul HaqNessuna valutazione finora
- Power ElectronicsDocumento80 paginePower ElectronicsAdnan AhmadNessuna valutazione finora
- Dac InterfacingDocumento5 pagineDac InterfacingHiren MewadaNessuna valutazione finora