Potrebbero piacerti anche
- Inv ItemDocumento127 pagineInv Itemprabhu181Nessuna valutazione finora
- Solubility PDFDocumento36 pagineSolubility PDFAshwin Narayan100% (1)
- 02 Minerals Library Basic Objects 5p1s4aDocumento113 pagine02 Minerals Library Basic Objects 5p1s4aman_y2k100% (1)
- SRU Presentation For NewDocumento47 pagineSRU Presentation For Newviettanct100% (3)
- Recent Developments On The Interpretation of Dissolved Gas Analysis in TransformersDocumento33 pagineRecent Developments On The Interpretation of Dissolved Gas Analysis in TransformersputrasejahtraNessuna valutazione finora
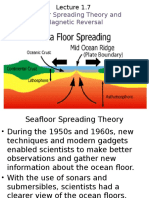
- Seafloor Spreading TheoryDocumento16 pagineSeafloor Spreading TheoryMark Anthony Evangelista Cabrieto100% (1)
- Potassium in Water by Atomic Absorption Spectrophotometry: Standard Test Method ForDocumento4 paginePotassium in Water by Atomic Absorption Spectrophotometry: Standard Test Method ForhydrogenperoksideNessuna valutazione finora
- Disturbance Modeling For Offset-Free Linear MPC (Important)Documento16 pagineDisturbance Modeling For Offset-Free Linear MPC (Important)rawand ehssanNessuna valutazione finora
- Exploring Observer-Based Sliding Mode Control For Nonlinear and Uncertain Systems A Comprehensive ReviewDocumento10 pagineExploring Observer-Based Sliding Mode Control For Nonlinear and Uncertain Systems A Comprehensive ReviewInternational Journal of Innovative Science and Research TechnologyNessuna valutazione finora
- 1 s2.0 S0952197624005311 MainDocumento13 pagine1 s2.0 S0952197624005311 MainphanduNessuna valutazione finora
- Algoritmos GenéticosDocumento10 pagineAlgoritmos GenéticosErick VegaNessuna valutazione finora
- Disturbance-Observer-Based Control For Semi-Markovian Jump Systems With Generally Uncertain Transition Rate and Saturation NonlinearityDocumento16 pagineDisturbance-Observer-Based Control For Semi-Markovian Jump Systems With Generally Uncertain Transition Rate and Saturation NonlinearityAravinth NarayananNessuna valutazione finora
- High-Gain Observer-Based Adaptive Fuzzy Control For A Class of Multivariable Nonlinear SystemsDocumento7 pagineHigh-Gain Observer-Based Adaptive Fuzzy Control For A Class of Multivariable Nonlinear SystemsAbdesselem BoulkrouneNessuna valutazione finora
- Slide Mode Control (SMC)Documento14 pagineSlide Mode Control (SMC)Jaol1976Nessuna valutazione finora
- A New Robust LMI-based Model Predictive Control For Continuous-Time Uncertain Nonlinear SystemsDocumento13 pagineA New Robust LMI-based Model Predictive Control For Continuous-Time Uncertain Nonlinear SystemsLuis CarvalhoNessuna valutazione finora
- Fault Tolerant Control For A Class of Switched Linear Systems Using Generalized Switched Observer SchemeDocumento12 pagineFault Tolerant Control For A Class of Switched Linear Systems Using Generalized Switched Observer SchemeFatiha HAMDINessuna valutazione finora
- Adaptive Robust Dynamic Surface Control For Uncertain Strict Feedback Nonlinear Systems Using Fuzzy Logic SystemsDocumento13 pagineAdaptive Robust Dynamic Surface Control For Uncertain Strict Feedback Nonlinear Systems Using Fuzzy Logic Systemsyazen H ShakirNessuna valutazione finora
- 2023-Enhanced Trajectory Tracking Via Disturbance-Observer-Based Modified Sliding Mode ControlDocumento29 pagine2023-Enhanced Trajectory Tracking Via Disturbance-Observer-Based Modified Sliding Mode ControlThế TrầnNessuna valutazione finora
- Overview of Methods For Voltage Sag Performance EstimationDocumento5 pagineOverview of Methods For Voltage Sag Performance EstimationJay F. KuizonNessuna valutazione finora
- Chang 2002Documento22 pagineChang 2002citianz2011Nessuna valutazione finora
- 1 s2.0 S1270963816301420 MainDocumento6 pagine1 s2.0 S1270963816301420 MainAyandeep MandalNessuna valutazione finora
- 2015 - Proctor - Dynamic Mode Decomposition With Control - SIAMDocumento20 pagine2015 - Proctor - Dynamic Mode Decomposition With Control - SIAM구본찬Nessuna valutazione finora
- Mathematics 09 00176 v2Documento15 pagineMathematics 09 00176 v2Angelo MachadoNessuna valutazione finora
- Global Sliding Mode ControlDocumento9 pagineGlobal Sliding Mode ControlYazdan RastegarNessuna valutazione finora
- Sliding Mode Control of PMSM Based On A Novel Disturbance ObserverDocumento5 pagineSliding Mode Control of PMSM Based On A Novel Disturbance ObserverNguyễn Văn HoàNessuna valutazione finora
- Discrete-Time Variable Structure Controller With A Decoupled Disturbance Compensator and Its Application To A CNC ServomechanismDocumento10 pagineDiscrete-Time Variable Structure Controller With A Decoupled Disturbance Compensator and Its Application To A CNC ServomechanismFernando OrnelasNessuna valutazione finora
- An Improved Adaptive Fuzzy Backstepping Control For Nonlinear Mechanical Systems With Mismatched Uncertainties-1Documento11 pagineAn Improved Adaptive Fuzzy Backstepping Control For Nonlinear Mechanical Systems With Mismatched Uncertainties-1Leroy Lionel SonfackNessuna valutazione finora
- Mathematics 11 01094Documento21 pagineMathematics 11 01094Sidahmed LarbaouiNessuna valutazione finora
- Automation 03 00003 With CoverDocumento38 pagineAutomation 03 00003 With CoverMarcel NicolaNessuna valutazione finora
- Synthesis of Neural Controller Applied To Flexible AC Transmission SystemsDocumento13 pagineSynthesis of Neural Controller Applied To Flexible AC Transmission Systemsashikhmd4467Nessuna valutazione finora
- Non-Singular Adaptive Terminal Sliding Mode Control of Rigid ManipulatorsDocumento10 pagineNon-Singular Adaptive Terminal Sliding Mode Control of Rigid Manipulatorshoàng nguyễnNessuna valutazione finora
- Computers & Industrial Engineering: Saddam Akber Abbasi, Muhammad Riaz, Arden MillerDocumento10 pagineComputers & Industrial Engineering: Saddam Akber Abbasi, Muhammad Riaz, Arden MillerCamilo GuerreroNessuna valutazione finora
- Modified Independent Modal Space Control Method For Active Control of Flexible SystemsDocumento10 pagineModified Independent Modal Space Control Method For Active Control of Flexible Systemsoscar201140Nessuna valutazione finora
- Congestion Management in A Deregulated Environment Using Corrective MeasuresDocumento6 pagineCongestion Management in A Deregulated Environment Using Corrective Measuresapi-3697505Nessuna valutazione finora
- Gence Li 1993Documento12 pagineGence Li 1993Luis CarvalhoNessuna valutazione finora
- Synthesis of Switching Controllers A Fuzzy SupervisorDocumento16 pagineSynthesis of Switching Controllers A Fuzzy SupervisornooraniaNessuna valutazione finora
- Interval Observers Design For Singularly Perturbed Systems: B. Yousfi, T. Raissi, M. Amairi and M. AounDocumento6 pagineInterval Observers Design For Singularly Perturbed Systems: B. Yousfi, T. Raissi, M. Amairi and M. AounWissal KHEMIRINessuna valutazione finora
- Model-Free Sliding-Mode Control For Systems With Input-And State - Dependent DisturbancesDocumento4 pagineModel-Free Sliding-Mode Control For Systems With Input-And State - Dependent Disturbances王和盛Nessuna valutazione finora
- LMI Approach To Output Feedback Control For Linear Uncertain Systems With D-Stability ConstraintsDocumento16 pagineLMI Approach To Output Feedback Control For Linear Uncertain Systems With D-Stability Constraintsaaa bbbNessuna valutazione finora
- Systems With Finite Communication Bandwidth Constraints-Part I: State Estimation ProblemsDocumento6 pagineSystems With Finite Communication Bandwidth Constraints-Part I: State Estimation ProblemsAbdurahim AbrahimNessuna valutazione finora
- Ultrasonic WeldingDocumento9 pagineUltrasonic WeldingkvvlNessuna valutazione finora
- Structural Vector Autoregressions and Higher Moments: Challenges and Solutions in Small SamplesDocumento52 pagineStructural Vector Autoregressions and Higher Moments: Challenges and Solutions in Small SamplesSatoshi NakamotoNessuna valutazione finora
- Feasiblity Analysis of Constrained Predictive Control S. Olaru, D. DumurDocumento7 pagineFeasiblity Analysis of Constrained Predictive Control S. Olaru, D. Dumursteaua99Nessuna valutazione finora
- Paper4 Asian Journal of Control Volume 7 Issue Number 3 Page(s) 323-329Documento7 paginePaper4 Asian Journal of Control Volume 7 Issue Number 3 Page(s) 323-329Nguyen Quang ThuanNessuna valutazione finora
- 1996 - Robust Constrained Model Predictive Control Using LMIDocumento19 pagine1996 - Robust Constrained Model Predictive Control Using LMIjemmyducNessuna valutazione finora
- Adaptive Learning Feedback LinearizationDocumento9 pagineAdaptive Learning Feedback LinearizationFouad YacefNessuna valutazione finora
- Ullah 2020Documento8 pagineUllah 2020Samy Kharuf GutierrezNessuna valutazione finora
- A Robust Approach To Stabilization of 2-DOF Underactuated Mechanical SystemsDocumento18 pagineA Robust Approach To Stabilization of 2-DOF Underactuated Mechanical SystemsAsdewq LocoNessuna valutazione finora
- Koshkouei A Burnham KJ Control of DC Motors Using Proportional Integral Sliding Mode - 2Documento6 pagineKoshkouei A Burnham KJ Control of DC Motors Using Proportional Integral Sliding Mode - 2manly2909Nessuna valutazione finora
- Local Robust Stability On Compact Set For NonlineaDocumento11 pagineLocal Robust Stability On Compact Set For NonlineaasadNessuna valutazione finora
- Feng Dai 1986 IEEETranAutomaticCtrlDocumento4 pagineFeng Dai 1986 IEEETranAutomaticCtrlDai FengNessuna valutazione finora
- Approximation of Large-Scale Dynamical Systems: An Overview: A.C. Antoulas and D.C. Sorensen August 31, 2001Documento22 pagineApproximation of Large-Scale Dynamical Systems: An Overview: A.C. Antoulas and D.C. Sorensen August 31, 2001Anonymous lEBdswQXmxNessuna valutazione finora
- Incremona Rubagotti FerraraDocumento8 pagineIncremona Rubagotti Ferraragerman.ortiz.go2023Nessuna valutazione finora
- 2007 CDC MemsDocumento6 pagine2007 CDC MemsJéssica FeitosaNessuna valutazione finora
- Sliding Mode Control PHD ThesisDocumento7 pagineSliding Mode Control PHD Thesisaflodnyqkefbbm100% (1)
- Transient Stability Analysis of The IEEE 14-Bus Test System Using Dynamic PDFDocumento6 pagineTransient Stability Analysis of The IEEE 14-Bus Test System Using Dynamic PDFNirmal mehtaNessuna valutazione finora
- Amcs 2020 30 3 9Documento12 pagineAmcs 2020 30 3 9Milutin PetronijevicNessuna valutazione finora
- A Novel Fractional Order Multiple ModelDocumento19 pagineA Novel Fractional Order Multiple Modeldavid teacherNessuna valutazione finora
- Robust Active Disturbance Rejection Control For Flexible Link ManipulatorDocumento18 pagineRobust Active Disturbance Rejection Control For Flexible Link Manipulatorabdelhamid.ghoul93Nessuna valutazione finora
- Two Approaches of The Construction of Guaranteeing Cost Minimax StrategiesDocumento9 pagineTwo Approaches of The Construction of Guaranteeing Cost Minimax StrategiesvimacollNessuna valutazione finora
- Fault Tolerant Tracking Control For Hybrid NonlineDocumento24 pagineFault Tolerant Tracking Control For Hybrid NonlineprobaNessuna valutazione finora
- Automatic Control 2 NotesDocumento38 pagineAutomatic Control 2 NotesÇağın OkuyucuNessuna valutazione finora
- Eric SASGMDocumento5 pagineEric SASGMRahul Kumar JhaNessuna valutazione finora
- Mode GlissantDocumento10 pagineMode GlissantSara ZdlNessuna valutazione finora
- 0978 Stochastic Reachability For Control of Spacecraft Relative MotionDocumento6 pagine0978 Stochastic Reachability For Control of Spacecraft Relative Motionp sangeerthNessuna valutazione finora
- Voltage Sag Assessment of Distribution System Using Monte Carlo SimulationDocumento6 pagineVoltage Sag Assessment of Distribution System Using Monte Carlo SimulationJAGANNATH PATRANessuna valutazione finora
- DREHMO Matic-C ENDocumento36 pagineDREHMO Matic-C ENsimbamikeNessuna valutazione finora
- Bind Second Valve OverviewDocumento27 pagineBind Second Valve OverviewNitin AggarwalNessuna valutazione finora
- Fixed Frequency, 99% Duty Cycle Peak Current Mode Notebook System Power ControllerDocumento44 pagineFixed Frequency, 99% Duty Cycle Peak Current Mode Notebook System Power ControllerAualasNessuna valutazione finora
- Probability H Venn Diagrams v2 SOLUTIONS v2 2 PDFDocumento7 pagineProbability H Venn Diagrams v2 SOLUTIONS v2 2 PDFEcho BaguinonNessuna valutazione finora
- Tesp12205pi R1Documento36 pagineTesp12205pi R1arabsniperNessuna valutazione finora
- Arthashastra: Citation NeededDocumento4 pagineArthashastra: Citation NeededtusharNessuna valutazione finora
- Methods of Test For Rheometer - ODR: 1. ScopeDocumento1 paginaMethods of Test For Rheometer - ODR: 1. ScopeArun GuptaNessuna valutazione finora
- Buffer SolutionDocumento6 pagineBuffer SolutionAdrija MandalNessuna valutazione finora
- Mazda 3Documento5 pagineMazda 3Jhony GranadosNessuna valutazione finora
- Calculation of Altitude CorrectionDocumento3 pagineCalculation of Altitude CorrectionMikami TeruNessuna valutazione finora
- LISTA PRECIOS CORPORATIVOS - Garantia en Partes de Diez (10) MesesDocumento10 pagineLISTA PRECIOS CORPORATIVOS - Garantia en Partes de Diez (10) MesesJavier DavidNessuna valutazione finora
- Sampling in Research in EducationDocumento18 pagineSampling in Research in EducationV.K. MaheshwariNessuna valutazione finora
- Differentiation11 21Documento75 pagineDifferentiation11 21Maryam ShahidNessuna valutazione finora
- ManageEngine Application Manager Best PracticesDocumento12 pagineManageEngine Application Manager Best PracticesNghiêm Sỹ Tâm PhươngNessuna valutazione finora
- Unit 2 - Introduction To Java - Solutions For Class 9 ICSE APC Understanding Computer Applications With BlueJ Including Java Programs - KnowledgeBoatDocumento8 pagineUnit 2 - Introduction To Java - Solutions For Class 9 ICSE APC Understanding Computer Applications With BlueJ Including Java Programs - KnowledgeBoatGopi Selvaraj67% (3)
- Exercise 2Documento4 pagineExercise 2Ir Fik TNessuna valutazione finora
- EC303Documento19 pagineEC303api-3853441Nessuna valutazione finora
- Entity Framework Interview Questions With AnswersDocumento16 pagineEntity Framework Interview Questions With AnswersShivprasad Koirala100% (5)
- Partial Differential Equations (Pdes)Documento5 paginePartial Differential Equations (Pdes)uploadingpersonNessuna valutazione finora
- TractionDocumento26 pagineTractionYogesh GurjarNessuna valutazione finora
- Olympus UT Catalog PDFDocumento52 pagineOlympus UT Catalog PDFGTpianomanNessuna valutazione finora
- Sodium Borohydride Reduction of CyclohexanoneDocumento6 pagineSodium Borohydride Reduction of CyclohexanoneIqmal HakimiNessuna valutazione finora
- Esam AliDocumento23 pagineEsam AliYoussef AliNessuna valutazione finora