Potrebbero piacerti anche
- DIY Mini Inverter 11-21V 150WDocumento1 paginaDIY Mini Inverter 11-21V 150WindustriacncNessuna valutazione finora
- GND GND: OptionalDocumento1 paginaGND GND: OptionalDaniel OfoeNessuna valutazione finora
- Amd RX 480Documento26 pagineAmd RX 480артём гильмановNessuna valutazione finora
- Comparador Dual Usado en Plasma LG KIA393P - S - F - PDFDocumento5 pagineComparador Dual Usado en Plasma LG KIA393P - S - F - PDFAntonio ChavezNessuna valutazione finora
- Semiconductor KIA393P/S/F/FK: Technical DataDocumento4 pagineSemiconductor KIA393P/S/F/FK: Technical DataAdam SchwemleinNessuna valutazione finora
- Comparador Dual Usado en Plasma LG KIA393P - S - F - PDFDocumento5 pagineComparador Dual Usado en Plasma LG KIA393P - S - F - PDFAntonio ChavezNessuna valutazione finora
- Semiconductor KIA393P/S/F/FK: Technical DataDocumento4 pagineSemiconductor KIA393P/S/F/FK: Technical DataAdam SchwemleinNessuna valutazione finora
- 160 07 00 000e3engDocumento1 pagina160 07 00 000e3engSrihari PrasadNessuna valutazione finora
- A350 Hyd PDFDocumento16 pagineA350 Hyd PDFSaleh El DalyNessuna valutazione finora
- A330 Ac2spdDocumento10 pagineA330 Ac2spdmohammed.ranaNessuna valutazione finora
- Transformer: 5 AmpsDocumento11 pagineTransformer: 5 Ampsmohammad ghassanNessuna valutazione finora
- BA120 AC2SpdDocumento12 pagineBA120 AC2SpdWissam RgailyNessuna valutazione finora
- Ricoh Pro 907 1107 1357 Point To Point DiagramDocumento32 pagineRicoh Pro 907 1107 1357 Point To Point DiagramvukkmajssNessuna valutazione finora
- TK100 - FonteDocumento1 paginaTK100 - FonteWilliam PazzottiNessuna valutazione finora
- UNIT5 Normalisation DependencyDocumento34 pagineUNIT5 Normalisation DependencyDeepu SadasivuniNessuna valutazione finora
- V126 10 080324 1Documento21 pagineV126 10 080324 1Mauricio RessutiNessuna valutazione finora
- Pioneer Gm-5500t SCHDocumento6 paginePioneer Gm-5500t SCHabung teaNessuna valutazione finora
- (Cont. Next Page) 1 GS 430 / GS 300: Power SourceDocumento3 pagine(Cont. Next Page) 1 GS 430 / GS 300: Power SourceАнастасияNessuna valutazione finora
- Zenbo Paper Bag 1260S-450C Electrical DiagramDocumento59 pagineZenbo Paper Bag 1260S-450C Electrical Diagramrex lapitanNessuna valutazione finora
- Transformer: 5 AmpsDocumento9 pagineTransformer: 5 AmpsMohammed Qaid AlathwaryNessuna valutazione finora
- Saga400 Stand 01Documento1 paginaSaga400 Stand 01Walter HerreraNessuna valutazione finora
- Transformer: 5 AmpsDocumento8 pagineTransformer: 5 Ampsmd mahinNessuna valutazione finora
- EM-N110 Charging CircuitDocumento1 paginaEM-N110 Charging CircuitHải TrầnNessuna valutazione finora
- Machdientim AnalogDocumento2 pagineMachdientim AnalogĐạt NguyễnNessuna valutazione finora
- RENR69730001Documento2 pagineRENR69730001Bienvenu MassouanguiNessuna valutazione finora
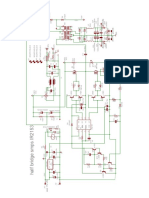
- Smps Half Bridge 2153 Irfp460 Smps Plain SchematicDocumento1 paginaSmps Half Bridge 2153 Irfp460 Smps Plain SchematicValmir MorschheiserNessuna valutazione finora
- Esquema Eletrico MX1024Documento1 paginaEsquema Eletrico MX1024Gabriel de LimaNessuna valutazione finora
- 3GSX AXA2200 7.5 - 15 kVA 473.179 3GSX AXA2200 7.5 - 15 kVA 473.179 3GSX AXA2200 7.5 - 15 kVA 473.179Documento2 pagine3GSX AXA2200 7.5 - 15 kVA 473.179 3GSX AXA2200 7.5 - 15 kVA 473.179 3GSX AXA2200 7.5 - 15 kVA 473.179JacksonNessuna valutazione finora
- Toilet Block: Bihar Panchayat Strengthening ProjectDocumento1 paginaToilet Block: Bihar Panchayat Strengthening ProjectAr. Osama FirozNessuna valutazione finora
- Mwaura 03 - 19 Sheet 2Documento1 paginaMwaura 03 - 19 Sheet 2alexNessuna valutazione finora
- Msi Armor RX470-570 4GB Esquematico V341 - 20Documento26 pagineMsi Armor RX470-570 4GB Esquematico V341 - 20Alejandro CamposNessuna valutazione finora
- Komax24 SCHDocumento1 paginaKomax24 SCHfraanjoNessuna valutazione finora
- D D D D D D: SN54HC245, SN74HC245 Octal Bus Transceivers With 3-State OutputsDocumento22 pagineD D D D D D: SN54HC245, SN74HC245 Octal Bus Transceivers With 3-State OutputsChathura PriyankaNessuna valutazione finora
- MAT263 NotessDocumento2 pagineMAT263 NotessAN NUR INSYIRAH AZRINNessuna valutazione finora
- EpsDocumento1 paginaEpsDkorniNessuna valutazione finora
- All Pro UsbDocumento1 paginaAll Pro UsbJesús EspinosaNessuna valutazione finora
- A350 Ac2spdDocumento14 pagineA350 Ac2spdWissam RgailyNessuna valutazione finora
- Ban Ve So Do Nguyen LyDocumento1 paginaBan Ve So Do Nguyen LyQuang Trần minhNessuna valutazione finora
- Transformer: 5 AmpsDocumento7 pagineTransformer: 5 Ampsmohammad ghassanNessuna valutazione finora
- I/P1 - +VE I/P1 - VE VCC SIG GND: TitleDocumento1 paginaI/P1 - +VE I/P1 - VE VCC SIG GND: TitleHEXTEK INSTRUMENTS100% (1)
- Transformer: 5 AmpsDocumento3 pagineTransformer: 5 AmpsMounsur ShojunNessuna valutazione finora
- Transformer: 5 AmpsDocumento10 pagineTransformer: 5 AmpsMohd Abu AjajNessuna valutazione finora
- TH TH ND TH TH TH TH TH: I May Have Made An ErrorDocumento36 pagineTH TH ND TH TH TH TH TH: I May Have Made An ErrorPisu Miau Pisu MiauNessuna valutazione finora
- KNQ7 SchematicDocumento1 paginaKNQ7 SchematicFariborz SadeghivafaNessuna valutazione finora
- 03 Electrical DocumentationDocumento21 pagine03 Electrical DocumentationalzeadyNessuna valutazione finora
- Ed 90817180Documento29 pagineEd 90817180Andrew89Nessuna valutazione finora
- GEZE Montageanleitung 764833Documento2 pagineGEZE Montageanleitung 764833guzde38383Nessuna valutazione finora
- САИПА-165 送丝回路 V1.0Documento1 paginaСАИПА-165 送丝回路 V1.0luyz martinNessuna valutazione finora
- Stereo AC Bias Tape RecorderDocumento1 paginaStereo AC Bias Tape RecorderFederico PunteriNessuna valutazione finora
- Jtag CPLD PDFDocumento1 paginaJtag CPLD PDFDeilyn RivasNessuna valutazione finora
- From Piezo 1: Signal 2: Ground 3: Cable Shield: Title: Piezo Preamp With High-Pass FilterDocumento1 paginaFrom Piezo 1: Signal 2: Ground 3: Cable Shield: Title: Piezo Preamp With High-Pass FilterMoray JohnnyNessuna valutazione finora
- Ic-72745 Sm6 KRL Jago Manja - Len Industry - Pt. Candida Mabel MutiaraDocumento8 pagineIc-72745 Sm6 KRL Jago Manja - Len Industry - Pt. Candida Mabel MutiarasuciNessuna valutazione finora
- Bosch Al3640cv 36v Li-Ion Charger With Battery SchematicsDocumento5 pagineBosch Al3640cv 36v Li-Ion Charger With Battery SchematicsПавлин ПейковNessuna valutazione finora
- S5 35 2 - Cei - ZF Mercedes - (2) 7 13Documento7 pagineS5 35 2 - Cei - ZF Mercedes - (2) 7 13okostiuchokNessuna valutazione finora
- MB09807UDocumento27 pagineMB09807URavishka SilvaNessuna valutazione finora
- A330 Ac2spdDocumento10 pagineA330 Ac2spdCharbel HajjNessuna valutazione finora
- My Sensors Pig WDocumento1 paginaMy Sensors Pig WLaurentiu GramaNessuna valutazione finora
- Fapesa - 1 50W ForosDocumento3 pagineFapesa - 1 50W ForosBernabe Ramiro Vazquez GuardiaNessuna valutazione finora
- Wt&Ions: Multiple Reference Frame Analysis of Non-Sinusoidal Drives S.D.SudhoeDocumento7 pagineWt&Ions: Multiple Reference Frame Analysis of Non-Sinusoidal Drives S.D.SudhoemssmsNessuna valutazione finora
- Han 2007Documento4 pagineHan 2007mssmsNessuna valutazione finora
- 1 Second Stage Filter DesignDocumento3 pagine1 Second Stage Filter DesignmssmsNessuna valutazione finora
- Sensorless Control of Induction Motors Using Multi-Level ConvertersDocumento11 pagineSensorless Control of Induction Motors Using Multi-Level ConvertersmssmsNessuna valutazione finora
- Dynamic Modeling and Simulation of SVM-DTC of Five Phase Induction MotorDocumento6 pagineDynamic Modeling and Simulation of SVM-DTC of Five Phase Induction MotormssmsNessuna valutazione finora
- A Complete DC Analysis of The Series Resonant ConverterDocumento16 pagineA Complete DC Analysis of The Series Resonant ConvertermssmsNessuna valutazione finora
- High Prequence Quasi-Square-Wave: NovelDocumento5 pagineHigh Prequence Quasi-Square-Wave: NovelmssmsNessuna valutazione finora
- Winding FunctionDocumento10 pagineWinding Functionmssms0% (1)
- Voltage Control of Transmission System Using Static Var CompensatorDocumento3 pagineVoltage Control of Transmission System Using Static Var CompensatormssmsNessuna valutazione finora
- An Elementary Proof of The Routh-Hurwitz Stability CriterionDocumento14 pagineAn Elementary Proof of The Routh-Hurwitz Stability CriterionmssmsNessuna valutazione finora
- DSCSC PDFDocumento4 pagineDSCSC PDFmssmsNessuna valutazione finora
- Winding 6 PDFDocumento5 pagineWinding 6 PDFmssmsNessuna valutazione finora
- A Novel Internal Fault Analysis of A Brushless DC Motor Using Winding Function TheoryDocumento6 pagineA Novel Internal Fault Analysis of A Brushless DC Motor Using Winding Function TheorymssmsNessuna valutazione finora
- Progress in Electromagnetics Research, Vol. 133, 515-534, 2013Documento20 pagineProgress in Electromagnetics Research, Vol. 133, 515-534, 2013mssmsNessuna valutazione finora
- MentionDocumento13 pagineMentionmssmsNessuna valutazione finora