Potrebbero piacerti anche
- Article Balancing of Rotor Blades PDFDocumento5 pagineArticle Balancing of Rotor Blades PDFClaudio SalicioNessuna valutazione finora
- Balancing Without PhaseDocumento2 pagineBalancing Without PhasevahidyasharNessuna valutazione finora
- Balancing Software BrochureDocumento6 pagineBalancing Software BrochureMohit NatuNessuna valutazione finora
- CEP VFD ManualDocumento234 pagineCEP VFD ManualUsama ZubairNessuna valutazione finora
- BALANCING TECHNIQUES TITLEDocumento20 pagineBALANCING TECHNIQUES TITLE2004007100% (1)
- TN 13 Omnitrend ShortcutsDocumento2 pagineTN 13 Omnitrend ShortcutsBrtonNessuna valutazione finora
- TN 7 VibxpertDocumento1 paginaTN 7 VibxpertBahtiar YudhistiraNessuna valutazione finora
- SMP 7Documento5 pagineSMP 7gullipalli srinivasa raoNessuna valutazione finora
- Balanceo Dinamico de Rotores en VoladizoDocumento2 pagineBalanceo Dinamico de Rotores en VoladizoRepositorio Mantenimiento100% (1)
- Study On Torsional Stiffness of Engine CrankshaftDocumento5 pagineStudy On Torsional Stiffness of Engine CrankshaftBestin VargheseNessuna valutazione finora
- Ch3 Balancing of Rigid - Flexible - Linked PDFDocumento119 pagineCh3 Balancing of Rigid - Flexible - Linked PDFAlexis CordovaNessuna valutazione finora
- Sleeve Bearing Problems: Oil Whip and Whirl ExplainedDocumento2 pagineSleeve Bearing Problems: Oil Whip and Whirl ExplainedmtttusharNessuna valutazione finora
- Dm200 CatalogDocumento6 pagineDm200 CatalogAS_865025438Nessuna valutazione finora
- Unbalance - DefinitionDocumento27 pagineUnbalance - DefinitionAV100% (1)
- October 30, 2007 © SKF Group Slide 1Documento23 pagineOctober 30, 2007 © SKF Group Slide 1AVNessuna valutazione finora
- By Sijal Ahmed: Turbomachinery Modelling in FluentDocumento20 pagineBy Sijal Ahmed: Turbomachinery Modelling in FluentArun Gupta100% (1)
- Interturn Short-Circuit Detector For Turbine-Generator Rotor WindingsDocumento6 pagineInterturn Short-Circuit Detector For Turbine-Generator Rotor WindingsEng Bagaragaza Romuald100% (1)
- Dynamic Vibration AbsorbersDocumento7 pagineDynamic Vibration AbsorberstmacspamNessuna valutazione finora
- Basic-Engineering - Electrical EngineeringDocumento227 pagineBasic-Engineering - Electrical EngineeringE-m FunaNessuna valutazione finora
- Rotor DynamicsDocumento9 pagineRotor DynamicsSagarKBLNessuna valutazione finora
- Evaluation of COMSOL Multiphysics For Rotordynamical AnalysisDocumento49 pagineEvaluation of COMSOL Multiphysics For Rotordynamical AnalysisPushkar PanditNessuna valutazione finora
- Condition Monitoring For ElectricalDocumento28 pagineCondition Monitoring For ElectricalArindam SamantaNessuna valutazione finora
- CM3152 en SKF Idler Sound MonitorDocumento4 pagineCM3152 en SKF Idler Sound MonitorLuisSilvaNessuna valutazione finora
- A I RS: David G. Dorrell, William ThomsonDocumento11 pagineA I RS: David G. Dorrell, William ThomsonEng Bagaragaza RomualdNessuna valutazione finora
- T19101 118Documento18 pagineT19101 118Chintan Raval100% (1)
- 5000 KW Gearbox High Pinion Bearing Temperatures 1644227029Documento7 pagine5000 KW Gearbox High Pinion Bearing Temperatures 1644227029MC ANessuna valutazione finora
- Balance VibrationDocumento4 pagineBalance VibrationZaidiNessuna valutazione finora
- 2 - Slow Speed Vibration Signal AnalysisDocumento9 pagine2 - Slow Speed Vibration Signal AnalysisSasi NimmakayalaNessuna valutazione finora
- Dynamic Vibration Absorber Design ProcedureDocumento20 pagineDynamic Vibration Absorber Design ProcedurePedro Martins100% (1)
- Unbalance IdentificationDocumento22 pagineUnbalance IdentificationAV100% (1)
- Training, Class I, Testing, IIb, 1-10Documento12 pagineTraining, Class I, Testing, IIb, 1-10luis_hernandez_qNessuna valutazione finora
- Balancing Basic Part IIDocumento6 pagineBalancing Basic Part IIAbdul KurniadiNessuna valutazione finora
- SPM Bearing Checker InstructionDocumento42 pagineSPM Bearing Checker Instructionmilos dzinoNessuna valutazione finora
- Vibration Analysis of Gear Box.5-MilosprokoDocumento3 pagineVibration Analysis of Gear Box.5-MilosprokoRavikiran Hegde100% (2)
- Vibration Measurement and Analysis FundamentalsDocumento28 pagineVibration Measurement and Analysis FundamentalsGilbertoAndresDuarteNessuna valutazione finora
- 12 Types of Bearing DefectsDocumento5 pagine12 Types of Bearing Defectsjameel babooramNessuna valutazione finora
- Eccentricity Measurements: Operation and Maintenance ManualDocumento32 pagineEccentricity Measurements: Operation and Maintenance ManualRabah AmidiNessuna valutazione finora
- VibrationDocumento4 pagineVibrationzhyhh100% (1)
- SYNCHRONOUS MOTOR PRINCIPLESDocumento21 pagineSYNCHRONOUS MOTOR PRINCIPLEStesfuNessuna valutazione finora
- Subsynchronous Resonance Analysis IEEE First Benchmark ModelDocumento4 pagineSubsynchronous Resonance Analysis IEEE First Benchmark ModelBhavik PrajapatiNessuna valutazione finora
- Solving Motor Vibration Problems On Vertical PumpsDocumento5 pagineSolving Motor Vibration Problems On Vertical Pumpsjameel babooramNessuna valutazione finora
- Two Plane Balancing with DAQmxDocumento10 pagineTwo Plane Balancing with DAQmxJim ToewsNessuna valutazione finora
- Ads RB 04 0005Documento6 pagineAds RB 04 0005Yulius Widiardi PwNessuna valutazione finora
- Format Final Report - Balancing ISODocumento68 pagineFormat Final Report - Balancing ISOAdeImanudin100% (1)
- Vulcan GoodDocumento48 pagineVulcan Goodtanha56313955Nessuna valutazione finora
- Sideband Energy Ratio Gea19501aDocumento1 paginaSideband Energy Ratio Gea19501azeroseyaNessuna valutazione finora
- Tool Holder BalancingDocumento19 pagineTool Holder Balancingjojo258Nessuna valutazione finora
- Temperature Effects On DC Motor Performance 1Documento10 pagineTemperature Effects On DC Motor Performance 1BabuNessuna valutazione finora
- Successful Solution: To The Challenge ofDocumento2 pagineSuccessful Solution: To The Challenge ofKenny RuizNessuna valutazione finora
- Balancing Without Phase ReadingDocumento2 pagineBalancing Without Phase Readingvirtual_56Nessuna valutazione finora
- Practical Approach To Precision BalancingDocumento4 paginePractical Approach To Precision BalancingAbolfazl KhakiNessuna valutazione finora
- Nota Tecnica OmnitrendDocumento4 pagineNota Tecnica OmnitrendAlejandro Jimenez FuentesNessuna valutazione finora
- Basic Vibration Signal Processing For Bearing Fault DetectionDocumento8 pagineBasic Vibration Signal Processing For Bearing Fault DetectionGuru PrakashNessuna valutazione finora
- Subsynchronous Oscillation Detection Using Microprocessor RelaysDocumento12 pagineSubsynchronous Oscillation Detection Using Microprocessor RelaysjeffguitarNessuna valutazione finora
- Structural Health MonitoringDa EverandStructural Health MonitoringDaniel BalageasNessuna valutazione finora
- Balancing Procedure Method - SKF ArticleDocumento6 pagineBalancing Procedure Method - SKF ArticlebackvlackoNessuna valutazione finora
- Dynamic BalencingDocumento29 pagineDynamic Balencingtrung caoNessuna valutazione finora
- Alternative methods for balancing fans and rotorsDocumento3 pagineAlternative methods for balancing fans and rotorsAgustin A.Nessuna valutazione finora
- Reducing Vibration by Balancing Rotor Blades: ReprintDocumento5 pagineReducing Vibration by Balancing Rotor Blades: Reprintmipaoll70Nessuna valutazione finora
- Phase AnalysisDocumento3 paginePhase Analysisk_shah_777Nessuna valutazione finora
- Balancing Report of A3 Main CA FanDocumento4 pagineBalancing Report of A3 Main CA FanAbhishek DasNessuna valutazione finora
- SKF Oil Injection Kits 729101 Series: 300 and 400 Mpa (43 500 and 58 000 Psi)Documento2 pagineSKF Oil Injection Kits 729101 Series: 300 and 400 Mpa (43 500 and 58 000 Psi)Abhishek DasNessuna valutazione finora
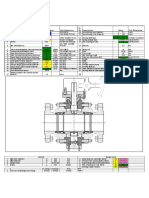
- 150 VF 870 Wafer Type Triple Eccentric Butterfly ValveDocumento1 pagina150 VF 870 Wafer Type Triple Eccentric Butterfly ValveAbhishek DasNessuna valutazione finora
- SKF Oil Injector SparesDocumento1 paginaSKF Oil Injector SparesAbhishek DasNessuna valutazione finora
- Oil Injector KitDocumento64 pagineOil Injector KitAbhishek DasNessuna valutazione finora
- Hoses StaubliDocumento32 pagineHoses StaubliAbhishek DasNessuna valutazione finora
- Staubli AdapetrsDocumento36 pagineStaubli AdapetrsAbhishek Das100% (1)
- SSV Divider ValvesDocumento28 pagineSSV Divider ValvesRock SayboltNessuna valutazione finora
- Dropsa.c1060ie Feeder Block Series Ag6 67Documento2 pagineDropsa.c1060ie Feeder Block Series Ag6 67Abhishek Das100% (1)
- 394 ChitwoodDocumento4 pagine394 ChitwoodAbhishek DasNessuna valutazione finora
- 394 KleefDocumento2 pagine394 KleefAbhishek DasNessuna valutazione finora
- 2a - 1c14a-Datasheet For DPDocumento28 pagine2a - 1c14a-Datasheet For DPLe KhiemNessuna valutazione finora
- Type 1061 Pneumatic Piston Rotary ActuatorDocumento24 pagineType 1061 Pneumatic Piston Rotary ActuatorJesus BolivarNessuna valutazione finora
- QswatDocumento77 pagineQswatMiguel AlvarezNessuna valutazione finora
- ISO - 7724 2 1984 Colorimetry PDFDocumento9 pagineISO - 7724 2 1984 Colorimetry PDFZbigNessuna valutazione finora
- Dse PDFDocumento4 pagineDse PDFpradeepNessuna valutazione finora
- 2.7 Ficha Técnica JVAN-B94KM4 R0 ENDocumento5 pagine2.7 Ficha Técnica JVAN-B94KM4 R0 ENFernando SepúlvedaNessuna valutazione finora
- TQM & Six SigmaDocumento25 pagineTQM & Six SigmaHukma Ram100% (1)
- FastCopy 2.08 Manual EnglishDocumento10 pagineFastCopy 2.08 Manual EnglishRafael Nery BritoNessuna valutazione finora
- MISys - Guide - Level 1 ADocumento63 pagineMISys - Guide - Level 1 AcaplusincNessuna valutazione finora
- iptables masquerading and firewallingDocumento7 pagineiptables masquerading and firewallingkwagNessuna valutazione finora
- 3) Quantity Take-OffsDocumento22 pagine3) Quantity Take-OffsRavinder SinghNessuna valutazione finora
- ECDIS FAQs and Useful LinksDocumento4 pagineECDIS FAQs and Useful LinksOrlando QuevedoNessuna valutazione finora
- PDS - GulfSea Cylcare ECA 50 (12dec14)Documento2 paginePDS - GulfSea Cylcare ECA 50 (12dec14)Obydur RahmanNessuna valutazione finora
- 22 6Documento13 pagine22 6Francisco M. RamosNessuna valutazione finora
- E54152 Product Catalogue 2017Documento86 pagineE54152 Product Catalogue 2017thisulaNessuna valutazione finora
- 5.1 - ASME B16.5 FlangesDocumento22 pagine5.1 - ASME B16.5 FlangesDavid EstradaNessuna valutazione finora
- 2016-16-12Documento30 pagine2016-16-12Jhan Carlos RamosNessuna valutazione finora
- Xenforo JsDocumento39 pagineXenforo JsjaaritNessuna valutazione finora
- Replace secondary DHCP peer with new memberDocumento2 pagineReplace secondary DHCP peer with new memberAlberto HuamaníNessuna valutazione finora
- ITE6 Instructor Materials Chapter1Documento19 pagineITE6 Instructor Materials Chapter1havisuNessuna valutazione finora
- AMBA AHB Bus Protocol Checker With Efficient Debugging MechanismDocumento4 pagineAMBA AHB Bus Protocol Checker With Efficient Debugging MechanismClaudia FountaineNessuna valutazione finora
- Linear ShrinkageDocumento4 pagineLinear Shrinkagelim.chrisNessuna valutazione finora
- ESR-Suctionpot AssemblyDocumento10 pagineESR-Suctionpot Assemblybmanojkumar16Nessuna valutazione finora
- Cable Sizing BasisDocumento11 pagineCable Sizing Basis10rodriguezNessuna valutazione finora
- Block 3 PDFDocumento58 pagineBlock 3 PDFAnil KumarNessuna valutazione finora
- S FTP CABLE CAT.7 AWG23 1200 MHZ - Datasheet SchrackDocumento3 pagineS FTP CABLE CAT.7 AWG23 1200 MHZ - Datasheet SchrackcantigiNessuna valutazione finora
- Debug Howto - Android-X86 - Porting Android To x86Documento3 pagineDebug Howto - Android-X86 - Porting Android To x86RatkoMRNessuna valutazione finora
- Tabla de Viscosidad de LubricantesDocumento52 pagineTabla de Viscosidad de LubricantesXavi X QunqiNessuna valutazione finora
- CK Tourqe CalculationDocumento7 pagineCK Tourqe Calculationamit amity100% (1)
- Instruction Manual Fisher Et Eat Easy e Valves cl125 Through cl600 en 124782 PDFDocumento36 pagineInstruction Manual Fisher Et Eat Easy e Valves cl125 Through cl600 en 124782 PDFAníbal RodriguezNessuna valutazione finora