Potrebbero piacerti anche
- Mechanical Expressions TutorialsDocumento26 pagineMechanical Expressions Tutorialsfiroz_d7331100% (1)
- StrengtheningDocumento22 pagineStrengtheningeddickNessuna valutazione finora
- Fracture MechanicsDocumento61 pagineFracture MechanicsMithun N GowdaNessuna valutazione finora
- Geometrical TolerancingDocumento12 pagineGeometrical TolerancingItalo Venegas100% (1)
- Determining Punch Problems: What The Slug Can Tell YouDocumento4 pagineDetermining Punch Problems: What The Slug Can Tell YouAl Engg100% (1)
- Assembly ModelingDocumento530 pagineAssembly ModelingLuc TellierNessuna valutazione finora
- A574Documento7 pagineA574KAROLNessuna valutazione finora
- Fundamentals of Metal Forming ProcessesDocumento23 pagineFundamentals of Metal Forming ProcessesVinayak Bhustalimath50% (2)
- Metallurgy App BriefingDocumento134 pagineMetallurgy App BriefingVijaykumar H K100% (1)
- BookDocumento26 pagineBookcoolsatishNessuna valutazione finora
- Indian Institute of Technology, Delhi: Department of Mechanical EnggDocumento0 pagineIndian Institute of Technology, Delhi: Department of Mechanical EnggGeorge KaridisNessuna valutazione finora
- Advanced Scratch Testing For Evaluation of Coatings Slides PDFDocumento36 pagineAdvanced Scratch Testing For Evaluation of Coatings Slides PDFPlínio Furtat100% (1)
- Guide to Load Analysis for Durability in Vehicle EngineeringDa EverandGuide to Load Analysis for Durability in Vehicle EngineeringP. JohannessonValutazione: 4 su 5 stelle4/5 (1)
- Ex19Principal Stress, Stress Intensity, AndVonMisesStressDocumento8 pagineEx19Principal Stress, Stress Intensity, AndVonMisesStressjdial9664Nessuna valutazione finora
- A Comparative Study of The Forming-Limit Diagram Next Term Models For Sheet SteelsDocumento8 pagineA Comparative Study of The Forming-Limit Diagram Next Term Models For Sheet SteelsRaghav KhajuriaNessuna valutazione finora
- Continuous casting The Ultimate Step-By-Step GuideDa EverandContinuous casting The Ultimate Step-By-Step GuideNessuna valutazione finora
- Altair's Student Guides - Instructor's Manual - CAE For Simulation of Sheet Metal FormingDocumento26 pagineAltair's Student Guides - Instructor's Manual - CAE For Simulation of Sheet Metal FormingKFourMetrics100% (13)
- Astm A 681Documento14 pagineAstm A 681talhadikenNessuna valutazione finora
- Tungsten CarbideDocumento47 pagineTungsten CarbideAmit DhekaleNessuna valutazione finora
- Load BalancingDocumento25 pagineLoad BalancingVivi VeraNessuna valutazione finora
- Csstings or ForgingsDocumento10 pagineCsstings or ForgingsRajaSekarsajjaNessuna valutazione finora
- Chamber and Tube Furnaces 0001-G-EDocumento64 pagineChamber and Tube Furnaces 0001-G-EMutsikamahwe BrianNessuna valutazione finora
- Metal Forming v1 1Documento39 pagineMetal Forming v1 1Gosaye DesalegnNessuna valutazione finora
- SIEMENS - Ingenieria Mecanica 2012 08 - CENITEC 1Documento141 pagineSIEMENS - Ingenieria Mecanica 2012 08 - CENITEC 1Nestor IglesiasNessuna valutazione finora
- Electrodeposition of Coatings, Part V: Surface Defects: Oatings LinicDocumento1 paginaElectrodeposition of Coatings, Part V: Surface Defects: Oatings LinicMaddyNessuna valutazione finora
- PunchingDocumento231 paginePunchingJulio Galvan100% (1)
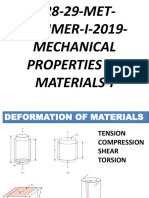
- Sumsem1-2018-19 Mee1005 Eth Vl2018198000361 Reference Material I 20-May-2019 l28-29 - Mechanical Properties of MaterialsDocumento32 pagineSumsem1-2018-19 Mee1005 Eth Vl2018198000361 Reference Material I 20-May-2019 l28-29 - Mechanical Properties of MaterialsADAM ISMAILNessuna valutazione finora
- A Review On Investigation of Casting Defects With SimulationDocumento5 pagineA Review On Investigation of Casting Defects With SimulationInternational Journal of Innovations in Engineering and ScienceNessuna valutazione finora
- Practical Aspects of Vibratory Stress RelievingDocumento7 paginePractical Aspects of Vibratory Stress RelievingRomul ChioreanNessuna valutazione finora
- Principles of Shear SlittingDocumento26 paginePrinciples of Shear SlittingMaureen Baird100% (1)
- Welcome To Sheetmetal DesignDocumento153 pagineWelcome To Sheetmetal Designjd4uNessuna valutazione finora
- Manufacturing Processes Cutting ToolDocumento15 pagineManufacturing Processes Cutting ToolanimiNessuna valutazione finora
- Is 2328 1995 Flattening TestingDocumento5 pagineIs 2328 1995 Flattening Testinghhr2412Nessuna valutazione finora
- Getting Started & Tutorials - 2007... STADD-PRODocumento540 pagineGetting Started & Tutorials - 2007... STADD-PROSushant Raje BhosaleNessuna valutazione finora
- Gears HoningDocumento7 pagineGears Honingsav33Nessuna valutazione finora
- VIOLI Straightening Brochure Low 012ukDocumento4 pagineVIOLI Straightening Brochure Low 012ukirsalan_shahidNessuna valutazione finora
- Die Casting ReportDocumento11 pagineDie Casting ReportFaria KhanNessuna valutazione finora
- Hot Deformation of Microalloyed SteelDocumento56 pagineHot Deformation of Microalloyed Steeljunee100% (1)
- Chapter2 - AJMDocumento13 pagineChapter2 - AJMravish kumarNessuna valutazione finora
- Surface Texture: G Lancaster Marlborough Boys CollegeDocumento22 pagineSurface Texture: G Lancaster Marlborough Boys CollegeJim JohnsonNessuna valutazione finora
- 1.0 TitleDocumento10 pagine1.0 TitlezackziffiNessuna valutazione finora
- 3b-Metal FORGINGDocumento16 pagine3b-Metal FORGINGIzzat Ikram100% (1)
- High Temperature Rotating Bending Fatigue Behavior of The Austenitic Stainless Steels, SUS 304-B and 316-B (Trans of National Research Institute For Metals, Vol 16 - 3, 1974) PDFDocumento9 pagineHigh Temperature Rotating Bending Fatigue Behavior of The Austenitic Stainless Steels, SUS 304-B and 316-B (Trans of National Research Institute For Metals, Vol 16 - 3, 1974) PDFpditzel8599Nessuna valutazione finora
- 01 - Fundamentals of Metalworking-2017son01Documento92 pagine01 - Fundamentals of Metalworking-2017son01emreNessuna valutazione finora
- MAGMA 5.2 eDocumento10 pagineMAGMA 5.2 emecaunidos7771Nessuna valutazione finora
- How To Run A Grinding TestDocumento6 pagineHow To Run A Grinding Testsealion72Nessuna valutazione finora
- Forming Limit DiagramsDocumento7 pagineForming Limit DiagramsatseucNessuna valutazione finora
- Nemak Casting Defects - An OverviewDocumento39 pagineNemak Casting Defects - An OverviewAlejandro Jose Garcia Fernandez100% (2)
- ProCAST CapabilitiesDocumento3 pagineProCAST Capabilitiesvdmoorthy123Nessuna valutazione finora
- Failure Analysis of A Car Suspension System Ball JointDocumento8 pagineFailure Analysis of A Car Suspension System Ball Jointsubha_aeroNessuna valutazione finora
- Laser WeldingDocumento11 pagineLaser WeldingnkalaiNessuna valutazione finora
- A Review On Modeling and Analysis of Car Wheel Rim Using CATIA & ANSYS PDFDocumento5 pagineA Review On Modeling and Analysis of Car Wheel Rim Using CATIA & ANSYS PDFHafiz M TahirNessuna valutazione finora
- 1 Selection of Heat Treatment and Aluminizing Sequence For Rene 77 SuperalloyDocumento4 pagine1 Selection of Heat Treatment and Aluminizing Sequence For Rene 77 SuperalloyEnary SalernoNessuna valutazione finora
- Tolerance AnalysisDocumento20 pagineTolerance Analysissaravananpg8697Nessuna valutazione finora
- Converting Dynamic Impact Events To Equivalent Static Loads in Vehicle ChassisDocumento62 pagineConverting Dynamic Impact Events To Equivalent Static Loads in Vehicle ChassisRm1262Nessuna valutazione finora
- Solidcast ManualDocumento67 pagineSolidcast ManualMIGUEL LEYVANessuna valutazione finora
- Semiconductor Device SimulationDocumento25 pagineSemiconductor Device SimulationLaura PrietoNessuna valutazione finora
- Engineering Structures: SciencedirectDocumento16 pagineEngineering Structures: SciencedirectJhon Smit Gonzales UscataNessuna valutazione finora
- Process Control Servo SystemDocumento16 pagineProcess Control Servo SystemCarlos RamirezNessuna valutazione finora
- Physics: Chapter - Laws of Motion Chapterwise Practise Problems (CPP) For NEETDocumento36 paginePhysics: Chapter - Laws of Motion Chapterwise Practise Problems (CPP) For NEETadityaNessuna valutazione finora
- Governing 11Documento35 pagineGoverning 11rahul100% (2)
- Che 0411 Steam Heat Exchangers Are UnderworkedDocumento5 pagineChe 0411 Steam Heat Exchangers Are UnderworkedXpizmonNessuna valutazione finora
- Basf Masterseal 912 Tds PDFDocumento2 pagineBasf Masterseal 912 Tds PDFDhananjay ShindeNessuna valutazione finora
- Tesis MIT Slurry TransportDocumento81 pagineTesis MIT Slurry TransportCarlos Esaú López GómezNessuna valutazione finora
- Buffer SelectionDocumento3 pagineBuffer SelectionSandeep KumarNessuna valutazione finora
- ANSI-SMACNA 2006 HvacDuctStandardsDocumento64 pagineANSI-SMACNA 2006 HvacDuctStandardsErica MorrisonNessuna valutazione finora
- Phase EquilibriaDocumento21 paginePhase EquilibriaGianna Cloe100% (1)
- Chapter 4Documento49 pagineChapter 4Jakir HossainNessuna valutazione finora
- ME 41 SyllabusDocumento1 paginaME 41 SyllabusElisha TanNessuna valutazione finora
- B Splines 04 PDFDocumento16 pagineB Splines 04 PDFShawn PetersenNessuna valutazione finora
- 9801 01 Que 20100630Documento8 pagine9801 01 Que 20100630SCZ28Nessuna valutazione finora
- Charlotte Perriand - From Photography To Design - de La Photographie Au DesignDocumento3 pagineCharlotte Perriand - From Photography To Design - de La Photographie Au DesignCamille BinzNessuna valutazione finora
- National University of Singapore ST5223: Statistical Models: Theory/Applications (Semester 2: AY 2016-2017) Time Allowed: 2 HoursDocumento14 pagineNational University of Singapore ST5223: Statistical Models: Theory/Applications (Semester 2: AY 2016-2017) Time Allowed: 2 Hours421250Nessuna valutazione finora
- Edgar Cayce LibraryDocumento7 pagineEdgar Cayce LibrarysnemalecNessuna valutazione finora
- O3 Final ReportDocumento109 pagineO3 Final ReportFaizan MirNessuna valutazione finora
- Cable Element Analysis TechniquesDocumento16 pagineCable Element Analysis TechniquesPankaj_Taneja_9684Nessuna valutazione finora
- Flow Conditioning PLatesDocumento8 pagineFlow Conditioning PLatesGeethaNessuna valutazione finora
- Equilibrium of Rigid BodiesDocumento18 pagineEquilibrium of Rigid BodiesjahirNessuna valutazione finora
- G. ACI 360R-06 Brings Slabs On Ground Into The 21st Century - Art McKinney PDFDocumento2 pagineG. ACI 360R-06 Brings Slabs On Ground Into The 21st Century - Art McKinney PDFinitbashNessuna valutazione finora
- Theil Index DecompositionDocumento2 pagineTheil Index DecompositionshareevNessuna valutazione finora
- Altitude Correction FactorsDocumento6 pagineAltitude Correction Factorscarlos.calderonNessuna valutazione finora
- Estimating The Size of Onion Epidermal Cells From Diffraction PatternsDocumento5 pagineEstimating The Size of Onion Epidermal Cells From Diffraction PatternsAlexis Nathán RuedaNessuna valutazione finora
- VicoDocumento17 pagineVicojustmenobleskNessuna valutazione finora
- Newtons Laws With Good PicturesDocumento30 pagineNewtons Laws With Good PicturesMohammed RiyazuddinNessuna valutazione finora
- William D. Penny - Signal Processing CourseDocumento178 pagineWilliam D. Penny - Signal Processing Coursejomasool100% (1)
- Iso 76 Rolling BearingsDocumento14 pagineIso 76 Rolling BearingsSezgin Bayrak50% (2)
- SeasonswebquestDocumento2 pagineSeasonswebquestapi-264590160Nessuna valutazione finora