Potrebbero piacerti anche
- FR-8x Editor Eng01 WDocumento8 pagineFR-8x Editor Eng01 WRadulian Daniel100% (1)
- Gordon NovelDocumento50 pagineGordon NovelNic Hotep100% (2)
- NanorobotsDocumento5 pagineNanorobotsMạc Đăng QuangNessuna valutazione finora
- Design For Manufacturing Course - by DFRDocumento257 pagineDesign For Manufacturing Course - by DFRhlgc63100% (2)
- Pick and Place Robot Report New Edited2Documento19 paginePick and Place Robot Report New Edited2Kshitij BandarNessuna valutazione finora
- Introduction To RoboticsDocumento54 pagineIntroduction To RoboticsEjidokun TemitayoNessuna valutazione finora
- Interface LCD (16X2) To Arduino: Step 1: Hardware ConnectionsDocumento2 pagineInterface LCD (16X2) To Arduino: Step 1: Hardware ConnectionsMohd Tanveer AshrafNessuna valutazione finora
- Human Emotions in Robots Human Emotions in Robots: Presentation by Yash Presentation by YashDocumento26 pagineHuman Emotions in Robots Human Emotions in Robots: Presentation by Yash Presentation by YashYash Sharad MandhareNessuna valutazione finora
- Apqp - DR SHFTDocumento60 pagineApqp - DR SHFTrajesh5000100% (2)
- Autonomous Robot 5Documento5 pagineAutonomous Robot 5Keith KnightNessuna valutazione finora
- Grundfos S Pump 5 - 29 KW Super VortexDocumento20 pagineGrundfos S Pump 5 - 29 KW Super Vortexdalveerchoudhary100% (1)
- Pick and Place Robotic Arm Using Arduino: December 2017Documento7 paginePick and Place Robotic Arm Using Arduino: December 2017visionNessuna valutazione finora
- Ijsetr Vol 6 Issue 12 1568 1573Documento7 pagineIjsetr Vol 6 Issue 12 1568 1573Siddhartha PvpNessuna valutazione finora
- Arduino Project1Documento3 pagineArduino Project1Kristine Barredo0% (1)
- Path Planning Algorithm Development For Autonomous PDFDocumento7 paginePath Planning Algorithm Development For Autonomous PDFIchwan KurniawanNessuna valutazione finora
- Land Mine Detection Robot Using BLE-3.0 Voice Controlled, Using Joystick and Gyroscopic SensorDocumento6 pagineLand Mine Detection Robot Using BLE-3.0 Voice Controlled, Using Joystick and Gyroscopic SensorInternational Journal of Innovative Science and Research TechnologyNessuna valutazione finora
- An Introduction To RoboticsDocumento4 pagineAn Introduction To RoboticsAkash SoniNessuna valutazione finora
- Can Robots Are Changing The World: A Review: International Research Journal of Engineering and Technology (IRJET)Documento7 pagineCan Robots Are Changing The World: A Review: International Research Journal of Engineering and Technology (IRJET)Pavan KumarNessuna valutazione finora
- Project Report FinalDocumento69 pagineProject Report Finalrohitsaini2383% (6)
- Kalb Report - CseDocumento20 pagineKalb Report - CseabrarmuzzammilNessuna valutazione finora
- An Introduction To RoboticsDocumento5 pagineAn Introduction To RoboticsRana PrathapNessuna valutazione finora
- SR211122201836Documento6 pagineSR211122201836Shailesh RanawareNessuna valutazione finora
- LandmineDocumento12 pagineLandmineGech ManNessuna valutazione finora
- Performance Specifications of Industrial RobotDocumento42 paginePerformance Specifications of Industrial RobotKeshav GargNessuna valutazione finora
- Obstacle Detection Robot PDFDocumento2 pagineObstacle Detection Robot PDFJenniferNessuna valutazione finora
- ROADPGCDocumento4 pagineROADPGCE KarunamoorthyNessuna valutazione finora
- Robotics - 2Documento65 pagineRobotics - 2chandansonics06Nessuna valutazione finora
- Tracking A Moving Object With Real-Time Obstacle Avoidance: Research ArticleDocumento9 pagineTracking A Moving Object With Real-Time Obstacle Avoidance: Research ArticleRafael LucasNessuna valutazione finora
- Bluetooth Control Pick and Place Robot Using Arduino IJERTCONV10IS11043Documento3 pagineBluetooth Control Pick and Place Robot Using Arduino IJERTCONV10IS11043Ernest ChiwaleNessuna valutazione finora
- Unit I INTRODUCTION AND ROBOT KINEMATICSDocumento11 pagineUnit I INTRODUCTION AND ROBOT KINEMATICShicet mechhodNessuna valutazione finora
- 9 DR - Mujiarto PaperID SST NOV 2020 1074 FinalRevision1Documento12 pagine9 DR - Mujiarto PaperID SST NOV 2020 1074 FinalRevision1benmesano026Nessuna valutazione finora
- A Review Comparative Analysis of Arduino Micro Controllers in Robotic CarDocumento10 pagineA Review Comparative Analysis of Arduino Micro Controllers in Robotic CarTariq AngelNessuna valutazione finora
- Seminar ReportDocumento18 pagineSeminar ReportCS084Rishav SinghNessuna valutazione finora
- Robotics: EverythingDocumento11 pagineRobotics: Everythingabu saidNessuna valutazione finora
- Sorting of Objects Based On Colour by PiDocumento10 pagineSorting of Objects Based On Colour by PiFarhab Khan FFNessuna valutazione finora
- 2 Obstacle Avoiding Robot PDFDocumento7 pagine2 Obstacle Avoiding Robot PDFRaj AryanNessuna valutazione finora
- Literature Survey 2Documento9 pagineLiterature Survey 2AnshNessuna valutazione finora
- Tree ClimbingDocumento37 pagineTree ClimbingJeevan Landge PatilNessuna valutazione finora
- Path Planning of Mobile Agents Using Ai TechniqueDocumento64 paginePath Planning of Mobile Agents Using Ai TechniqueGautam RaminiNessuna valutazione finora
- Automated Waste Segregator Bin202020Documento10 pagineAutomated Waste Segregator Bin202020MANOJ KNessuna valutazione finora
- Moradi Arian Synthesis Paper-1Documento21 pagineMoradi Arian Synthesis Paper-1api-611744595100% (1)
- Seminar ReportDocumento31 pagineSeminar ReportPriyaranjan BeheraNessuna valutazione finora
- RoboticsDocumento120 pagineRoboticsmivanoNessuna valutazione finora
- Robotic Arm With Base Rotation, Elbow and Wrist Motion With Functional Gripper For Pick and Place ApplicationsDocumento3 pagineRobotic Arm With Base Rotation, Elbow and Wrist Motion With Functional Gripper For Pick and Place Applicationsrock starNessuna valutazione finora
- Library Management Robot: Bomble Pranit R. G. Dipika Dr. ShaikhmeeravaliDocumento4 pagineLibrary Management Robot: Bomble Pranit R. G. Dipika Dr. ShaikhmeeravaliAnandu KBNessuna valutazione finora
- Moveit! (ROS Topics) : IEEE Robotics & Automation Magazine March 2012Documento3 pagineMoveit! (ROS Topics) : IEEE Robotics & Automation Magazine March 2012Gaby HayekNessuna valutazione finora
- Glass Cleaner Smart Robot: International Journal of Scientific Research in Science, Engineering and TechnologyDocumento8 pagineGlass Cleaner Smart Robot: International Journal of Scientific Research in Science, Engineering and Technologymsingh231974Nessuna valutazione finora
- Mobile Robotics: (Self Study Report)Documento25 pagineMobile Robotics: (Self Study Report)deepak_vk13Nessuna valutazione finora
- Bio Inspired RoboticsDocumento8 pagineBio Inspired RoboticsmycatalystsNessuna valutazione finora
- Scope of The ProjectDocumento2 pagineScope of The ProjectMuhammad HamzaNessuna valutazione finora
- Pro Yec To Robotic ADocumento4 paginePro Yec To Robotic AAnthony MadezcoNessuna valutazione finora
- Automatic Pick and Place Robotic Arm Vehicle: IjarcceDocumento3 pagineAutomatic Pick and Place Robotic Arm Vehicle: Ijarccebendali nadirNessuna valutazione finora
- Parameter Based Auto-SegregationDocumento2 pagineParameter Based Auto-SegregationInternational Journal of Innovative Science and Research TechnologyNessuna valutazione finora
- Wireless Surveillance Robot With Motion Detection and Live Video TransmissionDocumento9 pagineWireless Surveillance Robot With Motion Detection and Live Video TransmissionrajatpreetNessuna valutazione finora
- Swarm Intelligence Based Fire Fighting RobotDocumento6 pagineSwarm Intelligence Based Fire Fighting RobotIJAERS JOURNALNessuna valutazione finora
- DEVELOPMENT OF ROBOTIC ARM USing (1) - 1Documento27 pagineDEVELOPMENT OF ROBOTIC ARM USing (1) - 1Keshav Salgotra CEC208020Nessuna valutazione finora
- Metal and Gas Detecting RobotDocumento8 pagineMetal and Gas Detecting Robotraji hammedNessuna valutazione finora
- Robotics Notes 1Documento19 pagineRobotics Notes 1Dammalapati HarshavardhanNessuna valutazione finora
- Implementation of Ros Navigation Stack On Lego Mindstorms NXT 2.0 RobotDocumento6 pagineImplementation of Ros Navigation Stack On Lego Mindstorms NXT 2.0 RobotwendersoncsdepNessuna valutazione finora
- 504 - Swachh Abhiyan - Door-to-Door Pickup of Household Hazardous WasteDocumento11 pagine504 - Swachh Abhiyan - Door-to-Door Pickup of Household Hazardous WasteSrideviNessuna valutazione finora
- SETR 07: RoboticsDocumento13 pagineSETR 07: RoboticsHoover InstitutionNessuna valutazione finora
- DocumentationDocumento40 pagineDocumentationPurna Suresh PedamalluNessuna valutazione finora
- Zubayer Al Billal Khan Research Engineer, IICT BUET 01913469663Documento43 pagineZubayer Al Billal Khan Research Engineer, IICT BUET 01913469663SELVAKUMAR RNessuna valutazione finora
- AMP Microproject CoDocumento23 pagineAMP Microproject CovvppolycoNessuna valutazione finora
- Ijmerr v3n1 9Documento8 pagineIjmerr v3n1 9KwameOpareNessuna valutazione finora
- Floor Cleaning RobotDocumento2 pagineFloor Cleaning RobotMohd Tanveer AshrafNessuna valutazione finora
- Digest::SHA - Perl Extension For SHA-1/224/256/384/512Documento8 pagineDigest::SHA - Perl Extension For SHA-1/224/256/384/512Mohd Tanveer AshrafNessuna valutazione finora
- ARM Seven Development BoardDocumento3 pagineARM Seven Development BoardMohd Tanveer AshrafNessuna valutazione finora
- Micro ControllerDocumento9 pagineMicro ControllerMohd Tanveer AshrafNessuna valutazione finora
- PCB CNC MachineDocumento2 paginePCB CNC MachineMohd Tanveer AshrafNessuna valutazione finora
- Networking - Interview Questions and Answers Page 3 PDFDocumento3 pagineNetworking - Interview Questions and Answers Page 3 PDFMohd Tanveer AshrafNessuna valutazione finora
- Java TCP Chat - Multiple Client - Java Developers ZoneDocumento5 pagineJava TCP Chat - Multiple Client - Java Developers ZoneMohd Tanveer Ashraf100% (1)
- Cdma Mobile Communication Trainer: Microtek EnterprisesDocumento1 paginaCdma Mobile Communication Trainer: Microtek EnterprisesMohd Tanveer AshrafNessuna valutazione finora
- Build-A-Bard ABB - RFQ-807683Reaprovechamiento Relaves - SR For Cotejado 010A - HVACDocumento18 pagineBuild-A-Bard ABB - RFQ-807683Reaprovechamiento Relaves - SR For Cotejado 010A - HVACchristianNessuna valutazione finora
- SR No Co Name Salutation Person Designation Contact NoDocumento4 pagineSR No Co Name Salutation Person Designation Contact NoAnindya SharmaNessuna valutazione finora
- Advance Logic Activity On CountersDocumento31 pagineAdvance Logic Activity On CountersKrinx BuliganNessuna valutazione finora
- How To Measure MTFDocumento64 pagineHow To Measure MTFamtcorporationNessuna valutazione finora
- Magneto Hydro Dynamics PresentationDocumento19 pagineMagneto Hydro Dynamics PresentationVipul GuptaNessuna valutazione finora
- 03-1 Synchronous Machines 1 DNDocumento25 pagine03-1 Synchronous Machines 1 DNsaif thuraonNessuna valutazione finora
- Solar Pond - Awesome PDFDocumento26 pagineSolar Pond - Awesome PDFKartik MahajanNessuna valutazione finora
- VB Script ReferenceDocumento27 pagineVB Script ReferenceRajkumarNessuna valutazione finora
- Simatic EKB Install 2012-03-08Documento2 pagineSimatic EKB Install 2012-03-08Oton SilvaNessuna valutazione finora
- Eje Delantero BMW F10Documento94 pagineEje Delantero BMW F10Daniel Muñoz SotomayorNessuna valutazione finora
- AI in RobotsDocumento75 pagineAI in RobotsIslam SehsahNessuna valutazione finora
- Acceleration GrpahDocumento14 pagineAcceleration GrpahRAFAEL TORRESNessuna valutazione finora
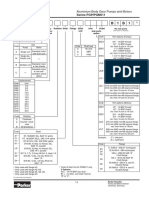
- PG 511 B 1 B 1: Ordering Code Series PGP/PGM511Documento7 paginePG 511 B 1 B 1: Ordering Code Series PGP/PGM511Four SticksNessuna valutazione finora
- Asme Wec Chapter Annual ReportDocumento12 pagineAsme Wec Chapter Annual ReportManazar HussainNessuna valutazione finora
- Ude My For Business Course ListDocumento51 pagineUde My For Business Course ListShehroz BhuttaNessuna valutazione finora
- The Difference Between The Internet and World Wide WebDocumento3 pagineThe Difference Between The Internet and World Wide WebSonal Jain100% (1)
- Pds 55930Documento2 paginePds 55930ekosuryonoNessuna valutazione finora
- Geotechnical Engineering 1 (RMIT) Course RevisionDocumento53 pagineGeotechnical Engineering 1 (RMIT) Course RevisionSaint123Nessuna valutazione finora
- Solar Module CellDocumento4 pagineSolar Module CellVinod BabhaleNessuna valutazione finora
- HighpuritysealsDocumento6 pagineHighpuritysealstuannhocutNessuna valutazione finora
- Turbin 1Documento27 pagineTurbin 1Durjoy Chakraborty100% (1)
- RT L2 General Examination PaperDocumento4 pagineRT L2 General Examination PaperdaddadNessuna valutazione finora
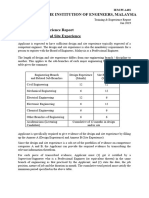
- IEM PI A401 - ANNEXE - Design & Site ExperienceDocumento5 pagineIEM PI A401 - ANNEXE - Design & Site ExperienceapiplajengilaNessuna valutazione finora
- Module002 LaboratoryExercise002Documento2 pagineModule002 LaboratoryExercise002Joaquin SmithNessuna valutazione finora
- Optimasi Blending Pertalite Dengan Komponen Reformate Di PT. XYZ BalikpapanDocumento7 pagineOptimasi Blending Pertalite Dengan Komponen Reformate Di PT. XYZ BalikpapanFrizki AkbarNessuna valutazione finora