Potrebbero piacerti anche
- Industrial Network Security, Second EditionDa EverandIndustrial Network Security, Second EditionValutazione: 3 su 5 stelle3/5 (2)
- AutomationNetworkSelection 3rded Chapter3 PDFDocumento31 pagineAutomationNetworkSelection 3rded Chapter3 PDFLeonardo Serna GuarínNessuna valutazione finora
- Wireless Networks for Industrial Automation, Fourth EditionDa EverandWireless Networks for Industrial Automation, Fourth EditionNessuna valutazione finora
- A Guide To The Automation Body of Knowledge: 2nd Edition Vernon L. Trevathan, EditorDocumento4 pagineA Guide To The Automation Body of Knowledge: 2nd Edition Vernon L. Trevathan, EditorSyedHashamHatimNessuna valutazione finora
- Certified Functional Safety Expert A Complete Guide - 2020 EditionDa EverandCertified Functional Safety Expert A Complete Guide - 2020 EditionNessuna valutazione finora
- MasterLogic 200catalogDocumento88 pagineMasterLogic 200catalogpandhuNessuna valutazione finora
- Two-Degree-of-Freedom Control Systems: The Youla Parameterization ApproachDa EverandTwo-Degree-of-Freedom Control Systems: The Youla Parameterization ApproachNessuna valutazione finora
- ISA99/IEC 62443: A Solution To Cyber-Security Issues?: District 12 & Qatar SectionDocumento52 pagineISA99/IEC 62443: A Solution To Cyber-Security Issues?: District 12 & Qatar SectionSupratim SurNessuna valutazione finora
- Certified Automation Professional A Complete Guide - 2020 EditionDa EverandCertified Automation Professional A Complete Guide - 2020 EditionNessuna valutazione finora
- DeltaV Controller RedundancyDocumento8 pagineDeltaV Controller RedundancyIsrael100% (1)
- Practical Industrial Data Communications: Best Practice TechniquesDa EverandPractical Industrial Data Communications: Best Practice TechniquesValutazione: 5 su 5 stelle5/5 (2)
- Distance Learning 2019Documento32 pagineDistance Learning 2019Stan AbrahamNessuna valutazione finora
- Industrial Automation and Control System Security PrinciplesDa EverandIndustrial Automation and Control System Security PrinciplesValutazione: 4.5 su 5 stelle4.5/5 (7)
- ISA - CAP Classification SystemDocumento16 pagineISA - CAP Classification SystemMiko QuijanoNessuna valutazione finora
- Process Control and Industrial Automation Complete Self-Assessment GuideDa EverandProcess Control and Industrial Automation Complete Self-Assessment GuideNessuna valutazione finora
- Human-Machine Interfaces For Plant Automation: Samuel M. Herb, AuthorDocumento119 pagineHuman-Machine Interfaces For Plant Automation: Samuel M. Herb, Authormessallam100% (2)
- DeltaVSISSafetyManual Dec08Documento62 pagineDeltaVSISSafetyManual Dec08Mohamed Labib100% (1)
- Programming SCADA Complete Self-Assessment GuideDa EverandProgramming SCADA Complete Self-Assessment GuideNessuna valutazione finora
- ISA Implementation For SISDocumento264 pagineISA Implementation For SISMauro MLRNessuna valutazione finora
- Supervisory control and data acquisition Third EditionDa EverandSupervisory control and data acquisition Third EditionNessuna valutazione finora
- Thompson Industrial Communications Fifth EditionDocumento46 pagineThompson Industrial Communications Fifth Editionjosueuscata100% (1)
- Fieldbus Systems and Their Applications 2005: A Proceedings volume from the 6th IFAC International Conference, Puebla, Mexico 14-25 November 2005Da EverandFieldbus Systems and Their Applications 2005: A Proceedings volume from the 6th IFAC International Conference, Puebla, Mexico 14-25 November 2005Miguel Leon ChavezNessuna valutazione finora
- Certified Automationprofessional (Isa Notes)Documento8 pagineCertified Automationprofessional (Isa Notes)Mohammed AzeemNessuna valutazione finora
- Isa TR5.1.01 - Isa TR77.40.01-2012Documento38 pagineIsa TR5.1.01 - Isa TR77.40.01-2012andr2s2cruz-1Nessuna valutazione finora
- ISA Resources For The Certified Automation Professional (Cap) ProgramDocumento2 pagineISA Resources For The Certified Automation Professional (Cap) ProgramDeeparnak BhowmickNessuna valutazione finora
- Practical Industrial Programming-IEC 61131-3 Acro 6Documento120 paginePractical Industrial Programming-IEC 61131-3 Acro 6Wallie BillingsleyNessuna valutazione finora
- CAP Knowledge and Skills - IsADocumento1 paginaCAP Knowledge and Skills - IsAengr_khalid1Nessuna valutazione finora
- RM70 FMEDA Exida - 1Documento22 pagineRM70 FMEDA Exida - 1Inter Tung100% (1)
- Honeywell FTE Training Course ADocumento46 pagineHoneywell FTE Training Course AAnonymous NwnJNONessuna valutazione finora
- Is A Publications and Standards CatalogDocumento92 pagineIs A Publications and Standards CatalogKotteeswaran Rangasamy R0% (1)
- Certified Control Systems Technician® (CCST®) Level I Review Course (TS00) - ISADocumento1 paginaCertified Control Systems Technician® (CCST®) Level I Review Course (TS00) - ISAYasir AliNessuna valutazione finora
- 2.2.2 - SIS - Design, Analysis, and Justification (EC50E - Online Version) - ISADocumento3 pagine2.2.2 - SIS - Design, Analysis, and Justification (EC50E - Online Version) - ISARoberto Carrasco0% (1)
- Level: Chapter 1: Process InstrumentationDocumento2 pagineLevel: Chapter 1: Process Instrumentationابزار دقیقNessuna valutazione finora
- 09-DeltaV SISDocumento201 pagine09-DeltaV SISakramhomriNessuna valutazione finora
- ISA-101.01-2015 - Human Machine Interfaces For Process Automation SystemsDocumento56 pagineISA-101.01-2015 - Human Machine Interfaces For Process Automation SystemsHuber Quintero100% (1)
- WP DeltaV Software Update Deployment PDFDocumento8 pagineWP DeltaV Software Update Deployment PDFevbaruNessuna valutazione finora
- ISA CSE Study Guide - 4th EditionDocumento116 pagineISA CSE Study Guide - 4th EditionDominic Francia75% (4)
- Applying S88 PDFDocumento171 pagineApplying S88 PDFHanif PayandehNessuna valutazione finora
- Industrial Communication: Chapter 2: Modbus SerialDocumento33 pagineIndustrial Communication: Chapter 2: Modbus Serialatmoko2Nessuna valutazione finora
- Ansi Isa 101-01-2015 Toc ExcerptDocumento9 pagineAnsi Isa 101-01-2015 Toc Excerptmuneeb.irfan9873Nessuna valutazione finora
- Factory Talk View SEDocumento255 pagineFactory Talk View SEzkaticNessuna valutazione finora
- Feedforward and Ratio Control: Isa Mentor Program Presentation By: Gregory K. McmillanDocumento24 pagineFeedforward and Ratio Control: Isa Mentor Program Presentation By: Gregory K. McmillanJosé Diogo ForteNessuna valutazione finora
- Final Control Elements PDFDocumento36 pagineFinal Control Elements PDFmgkvprNessuna valutazione finora
- Interface For RS3 IODocumento48 pagineInterface For RS3 IOSaad BroNessuna valutazione finora
- Beckhoff IEC61131 3Documento176 pagineBeckhoff IEC61131 3jhuskanovicNessuna valutazione finora
- The Six - Fundamental Control Strategies PDFDocumento48 pagineThe Six - Fundamental Control Strategies PDFAnonymous AsIbqUNessuna valutazione finora
- Control Engineering April 12Documento72 pagineControl Engineering April 12Mauro SánchezNessuna valutazione finora
- 140358649-CCST Part2Documento1 pagina140358649-CCST Part2CH1253100% (1)
- CAP Question Sample PDFDocumento36 pagineCAP Question Sample PDF-' NandoNessuna valutazione finora
- ISA-TR91.00.02-2003: Criticality Classification Guideline For InstrumentationDocumento30 pagineISA-TR91.00.02-2003: Criticality Classification Guideline For Instrumentationselvaraj_m100% (1)
- Common Industrial Protocol and Family of CIP Networks de ODVDocumento134 pagineCommon Industrial Protocol and Family of CIP Networks de ODVAbdenago JesusNessuna valutazione finora
- ISA TR84.00.03 Guidance For Testing of Process Sector Safety Instrumented FunctionsDocumento222 pagineISA TR84.00.03 Guidance For Testing of Process Sector Safety Instrumented FunctionsGopalMahanta100% (1)
- IsaDocumento19 pagineIsaPaul Zagaceta Lizares100% (1)
- ISA112 SCADA System Model Architecture Diagram - DRAFT (Subject To Change)Documento1 paginaISA112 SCADA System Model Architecture Diagram - DRAFT (Subject To Change)Anonymous dQZRlcoLdhNessuna valutazione finora
- Industrial-Data-Communications (pg22) PDFDocumento285 pagineIndustrial-Data-Communications (pg22) PDFBruno Martins100% (2)
- Automation Network Selection - IsADocumento113 pagineAutomation Network Selection - IsAerstendrain100% (1)
- ControlLogix Selection GuideDocumento88 pagineControlLogix Selection Guideronnell_naidooNessuna valutazione finora
- Lutze Switch PowerDocumento268 pagineLutze Switch PowerkanbouchNessuna valutazione finora
- TS00E v1.2 Student Noteset PDFDocumento303 pagineTS00E v1.2 Student Noteset PDFpatrick morris100% (1)
- Taller Control No LinealDocumento11 pagineTaller Control No LinealCamilo Ramirez ANessuna valutazione finora
- 03 MagneticLevitationSystemDocumento14 pagine03 MagneticLevitationSystemCamilo Ramirez ANessuna valutazione finora
- RPi Codesys GuideDocumento16 pagineRPi Codesys GuideSantiAgoNessuna valutazione finora
- Modbus PDFDocumento15 pagineModbus PDFleothiasNessuna valutazione finora
- AutomationNetworkSelectionThirdEd Caro Chapter3Documento32 pagineAutomationNetworkSelectionThirdEd Caro Chapter3Camilo Ramirez ANessuna valutazione finora
- A New Model of Magnetic Force in Magnetic Levitation SystemsDocumento9 pagineA New Model of Magnetic Force in Magnetic Levitation SystemsCamilo Ramirez ANessuna valutazione finora
- Offline License RequestDocumento4 pagineOffline License RequestYusri RazakNessuna valutazione finora
- I-O BoardDocumento7 pagineI-O BoardBoris MaldonadoNessuna valutazione finora
- LC700 Overview March2000 EaiDocumento101 pagineLC700 Overview March2000 EaiCezardeBarrosNessuna valutazione finora
- CA Easytrieve Report Generator 11 6Documento1.032 pagineCA Easytrieve Report Generator 11 6GirishNessuna valutazione finora
- Part Number: MAN908080-00 MAN908080-01 Revision: KDocumento261 paginePart Number: MAN908080-00 MAN908080-01 Revision: KAquiles Tolosa SotomayorNessuna valutazione finora
- Student E-Mail User Guide For Student: IT DivisionDocumento6 pagineStudent E-Mail User Guide For Student: IT DivisionShah KhanNessuna valutazione finora
- Zoomba: A Micro-Language For Jvms .Documento163 pagineZoomba: A Micro-Language For Jvms .San DeeptiNessuna valutazione finora
- AS400 Server Capacity Planning - sg242159Documento198 pagineAS400 Server Capacity Planning - sg242159Danny TangNessuna valutazione finora
- 2011-06-03 12.45.30 ErrorDocumento12 pagine2011-06-03 12.45.30 ErrorlfmlalodiaNessuna valutazione finora
- Flip-Flop Types, Their Conversion and Applications - GeeksforGeeksDocumento3 pagineFlip-Flop Types, Their Conversion and Applications - GeeksforGeeksRaJu AhMeDNessuna valutazione finora
- G1M (SDR) 2.0 enDocumento15 pagineG1M (SDR) 2.0 enSebastian Rojas LepeNessuna valutazione finora
- Today We'll Talk Generally About C++ Development (Plus A Few Platform Specifics)Documento15 pagineToday We'll Talk Generally About C++ Development (Plus A Few Platform Specifics)Azizullah TahzibNessuna valutazione finora
- Steganography Using JAVADocumento30 pagineSteganography Using JAVADevendra Sharma67% (3)
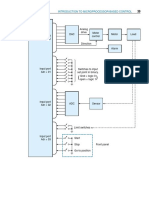
- A Control System Using Parallel Interface.: Microprocessor ControllerDocumento4 pagineA Control System Using Parallel Interface.: Microprocessor Controllernovo orderNessuna valutazione finora
- Error Code ListDocumento29 pagineError Code ListBipin SinghNessuna valutazione finora
- EWAN Lab 3 5 2 InstructorDocumento5 pagineEWAN Lab 3 5 2 InstructorDario PazNessuna valutazione finora
- Ankita Datta: SkillsDocumento2 pagineAnkita Datta: SkillsAshishNessuna valutazione finora
- JMobile Training Day1 v16Documento142 pagineJMobile Training Day1 v16Vegard SømliøyNessuna valutazione finora
- Automesh 4gtm PDFDocumento8 pagineAutomesh 4gtm PDFFrancis LinNessuna valutazione finora
- En Itil FND 2011 Samplepaperc v1.3Documento16 pagineEn Itil FND 2011 Samplepaperc v1.3szlaciba2_326117182Nessuna valutazione finora
- Intro To CUDADocumento76 pagineIntro To CUDADisinlung Kamei DisinlungNessuna valutazione finora
- Null Modem WikiDocumento5 pagineNull Modem WikiSantiago CorderoNessuna valutazione finora
- Alg Part ADocumento22 pagineAlg Part AHamid ArashNessuna valutazione finora
- Java MPDocumento14 pagineJava MPLalitNessuna valutazione finora
- 500 DR&FManualDocumento152 pagine500 DR&FManualChaulbrookNessuna valutazione finora
- J 1417-Information Security (2014 Admn OnwardsDocumento10 pagineJ 1417-Information Security (2014 Admn OnwardsLeslie QwerNessuna valutazione finora
- Maris Navico Manuals ECDIS900 Users Guide Rel LDocumento309 pagineMaris Navico Manuals ECDIS900 Users Guide Rel LAdi PrasetyoNessuna valutazione finora
- ResumeDocumento3 pagineResumeHarshal TapadiyaNessuna valutazione finora
- VSphere 6.5 StorageDocumento22 pagineVSphere 6.5 StorageplgrodriguesNessuna valutazione finora
- Django E Commerce Website PROJECT REPORTDocumento57 pagineDjango E Commerce Website PROJECT REPORTPrachi VermaNessuna valutazione finora
- CCNA Certification Study Guide, Volume 2: Exam 200-301Da EverandCCNA Certification Study Guide, Volume 2: Exam 200-301Nessuna valutazione finora
- PHP BLUEPRINT: An Essential Beginners Guide to Learn the Realms of PHP From A-ZDa EverandPHP BLUEPRINT: An Essential Beginners Guide to Learn the Realms of PHP From A-ZNessuna valutazione finora
- The Compete Ccna 200-301 Study Guide: Network Engineering EditionDa EverandThe Compete Ccna 200-301 Study Guide: Network Engineering EditionValutazione: 5 su 5 stelle5/5 (4)
- Set Up Your Own IPsec VPN, OpenVPN and WireGuard Server: Build Your Own VPNDa EverandSet Up Your Own IPsec VPN, OpenVPN and WireGuard Server: Build Your Own VPNValutazione: 5 su 5 stelle5/5 (1)
- Cybersecurity: A Simple Beginner’s Guide to Cybersecurity, Computer Networks and Protecting Oneself from Hacking in the Form of Phishing, Malware, Ransomware, and Social EngineeringDa EverandCybersecurity: A Simple Beginner’s Guide to Cybersecurity, Computer Networks and Protecting Oneself from Hacking in the Form of Phishing, Malware, Ransomware, and Social EngineeringValutazione: 5 su 5 stelle5/5 (40)
- AWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamDa EverandAWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamNessuna valutazione finora
- Microsoft Certified Azure Fundamentals Study Guide: Exam AZ-900Da EverandMicrosoft Certified Azure Fundamentals Study Guide: Exam AZ-900Nessuna valutazione finora
- Evaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsDa EverandEvaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsValutazione: 5 su 5 stelle5/5 (1)
- Unlock Any Roku Device: Watch Shows, TV, & Download AppsDa EverandUnlock Any Roku Device: Watch Shows, TV, & Download AppsNessuna valutazione finora
- Networking Fundamentals: Develop the networking skills required to pass the Microsoft MTA Networking Fundamentals Exam 98-366Da EverandNetworking Fundamentals: Develop the networking skills required to pass the Microsoft MTA Networking Fundamentals Exam 98-366Nessuna valutazione finora
- Software-Defined Networks: A Systems ApproachDa EverandSoftware-Defined Networks: A Systems ApproachValutazione: 5 su 5 stelle5/5 (1)
- Hacking Network Protocols: Complete Guide about Hacking, Scripting and Security of Computer Systems and Networks.Da EverandHacking Network Protocols: Complete Guide about Hacking, Scripting and Security of Computer Systems and Networks.Valutazione: 5 su 5 stelle5/5 (2)
- Concise Guide to OTN optical transport networksDa EverandConcise Guide to OTN optical transport networksValutazione: 4 su 5 stelle4/5 (2)
- Azure Networking: Command Line Mastery From Beginner To ArchitectDa EverandAzure Networking: Command Line Mastery From Beginner To ArchitectNessuna valutazione finora
- Hacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxDa EverandHacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxValutazione: 4.5 su 5 stelle4.5/5 (67)
- Microsoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsDa EverandMicrosoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsNessuna valutazione finora
- Alcatel-Lucent Service Routing Architect (SRA) Self-Study Guide: Preparing for the BGP, VPRN and Multicast ExamsDa EverandAlcatel-Lucent Service Routing Architect (SRA) Self-Study Guide: Preparing for the BGP, VPRN and Multicast ExamsNessuna valutazione finora
- Computer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityDa EverandComputer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityValutazione: 4.5 su 5 stelle4.5/5 (13)
- AWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamDa EverandAWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamValutazione: 5 su 5 stelle5/5 (1)
- Amazon Web Services (AWS) Interview Questions and AnswersDa EverandAmazon Web Services (AWS) Interview Questions and AnswersValutazione: 4.5 su 5 stelle4.5/5 (3)