Potrebbero piacerti anche
- 0263d1b969293-1.time, Distance and Speed (Theory &exercise)Documento14 pagine0263d1b969293-1.time, Distance and Speed (Theory &exercise)Siddharth RajendranNessuna valutazione finora
- Political Science: Test SeriesDocumento109 paginePolitical Science: Test SeriesSiddharth Rajendran0% (1)
- NEP Final For Circulation PDFDocumento60 pagineNEP Final For Circulation PDFNaren SainiNessuna valutazione finora
- Application for Masters (2020-21) : Address For Correspondence प ाचार का पता Permanent Address थायी पताDocumento2 pagineApplication for Masters (2020-21) : Address For Correspondence प ाचार का पता Permanent Address थायी पताSiddharth RajendranNessuna valutazione finora
- Air Pollution Control Technology Fact SheetDocumento5 pagineAir Pollution Control Technology Fact SheetSiddharth RajendranNessuna valutazione finora
- E Receipt For State Bank Collect PaymentDocumento1 paginaE Receipt For State Bank Collect PaymentSiddharth RajendranNessuna valutazione finora
- Vedic Reading Form: Appointment With Pt. Sanjay RathDocumento4 pagineVedic Reading Form: Appointment With Pt. Sanjay RathSiddharth RajendranNessuna valutazione finora
- Sigma: BY: Siddharth Roll No: 143254Documento5 pagineSigma: BY: Siddharth Roll No: 143254Siddharth RajendranNessuna valutazione finora
- 1 6 Monomer Drawing PracticeDocumento4 pagine1 6 Monomer Drawing PracticeSiddharth RajendranNessuna valutazione finora
- S No Reply: Coal India Limited Recruitment of Management TraineesDocumento4 pagineS No Reply: Coal India Limited Recruitment of Management TraineesSiddharth RajendranNessuna valutazione finora
- Central Electronics Limited (A Public Sector Enterprises) 4, Industrial Area, Sahibabad - 201010 (UP)Documento2 pagineCentral Electronics Limited (A Public Sector Enterprises) 4, Industrial Area, Sahibabad - 201010 (UP)Siddharth RajendranNessuna valutazione finora
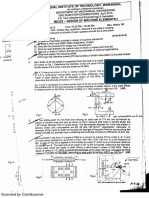
- Dme 1Documento4 pagineDme 1Siddharth RajendranNessuna valutazione finora
- E Receipt For State Bank Collect PaymentDocumento1 paginaE Receipt For State Bank Collect PaymentSiddharth RajendranNessuna valutazione finora
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Lesson 9 Rotation With Variable Angular Acceleration: OverviewDocumento2 pagineLesson 9 Rotation With Variable Angular Acceleration: OverviewNadjer C. AdamNessuna valutazione finora
- Kinematics of Rotation of Rigid BodiesDocumento10 pagineKinematics of Rotation of Rigid BodiesWong SunNessuna valutazione finora
- RatationDocumento38 pagineRatationdrfefvdsfNessuna valutazione finora
- 74-11th Physics - Book Back Questions - English Medium PDF DownloadDocumento63 pagine74-11th Physics - Book Back Questions - English Medium PDF DownloadjohnsonNessuna valutazione finora
- Design and Fabrication of Yam Peling MachineDocumento17 pagineDesign and Fabrication of Yam Peling MachineOlatunbosun OyeyemiNessuna valutazione finora
- Scriptmanual enDocumento59 pagineScriptmanual enKovácsZsoltNessuna valutazione finora
- Powerpoint PHY01 CO5Documento51 paginePowerpoint PHY01 CO5HURHURNessuna valutazione finora
- Dynamic Text EditDocumento77 pagineDynamic Text EditabikoyeoeNessuna valutazione finora
- Bird - Higher Engineering Mathematics, 5TH Ed., Newnes, 2006Documento16 pagineBird - Higher Engineering Mathematics, 5TH Ed., Newnes, 2006RistagenNessuna valutazione finora
- TOM Thomas Bevan PDFDocumento640 pagineTOM Thomas Bevan PDFDebashishNessuna valutazione finora
- The URScript Programming LanguageDocumento39 pagineThe URScript Programming Languagepedrouthu2483Nessuna valutazione finora
- A2 Physics Revision GuideDocumento78 pagineA2 Physics Revision GuideThomas Roe100% (3)
- EM Assignment 3Documento3 pagineEM Assignment 3akchat.soniNessuna valutazione finora
- PHY 101 Elementary Physics (Digital Content)Documento87 paginePHY 101 Elementary Physics (Digital Content)Frank MengiNessuna valutazione finora
- Angular Momentum 1Documento29 pagineAngular Momentum 1Atif ImamNessuna valutazione finora
- Dom Tut SheetDocumento3 pagineDom Tut SheetYateesh GuptaNessuna valutazione finora
- DynamicsDocumento12 pagineDynamicsmigs_gomezNessuna valutazione finora
- Objectives and Guide Card: Angular Position, ThetaDocumento21 pagineObjectives and Guide Card: Angular Position, ThetaClarence Sanchez AntoninoNessuna valutazione finora
- Estructuras Químicas en LatexDocumento84 pagineEstructuras Químicas en LatexMiguel Angel Mosquera MolinaNessuna valutazione finora
- 16 PDFDocumento129 pagine16 PDFgNessuna valutazione finora
- 1st Puc Physics Chapter7-System of Particles and Rotational Motion Notes by U N SwamyDocumento30 pagine1st Puc Physics Chapter7-System of Particles and Rotational Motion Notes by U N Swamyashwinikumari bNessuna valutazione finora
- DOM 2 Mark QuestionDocumento8 pagineDOM 2 Mark QuestionPRABAKARAN M PNessuna valutazione finora
- Dynamics of Rigid Bodies PDFDocumento138 pagineDynamics of Rigid Bodies PDFGrachelle Ann PabloNessuna valutazione finora
- Lombardo Presentation PDFDocumento20 pagineLombardo Presentation PDFGkkNessuna valutazione finora
- Chapter 9 FluidDocumento17 pagineChapter 9 Fluidjether InojalesNessuna valutazione finora
- 2-11 Course FileDocumento74 pagine2-11 Course FilepragatinareshNessuna valutazione finora
- 09 - Slide - Handout - 1 (3) Circular and Rotational MotionDocumento8 pagine09 - Slide - Handout - 1 (3) Circular and Rotational MotionKatherine Heigl MadrigalNessuna valutazione finora
- 1st Year Physics Notes Chap05Documento15 pagine1st Year Physics Notes Chap05phoool83% (6)
- CH 16Documento30 pagineCH 16Adeel AsgharNessuna valutazione finora