Potrebbero piacerti anche
- Enfoque Metodológico General para El Análisis de Logs CríticosDocumento1 paginaEnfoque Metodológico General para El Análisis de Logs CríticosMarcosNessuna valutazione finora
- Copiar Los Logs A Una Sola Ubicación para Su RevisiónDocumento1 paginaCopiar Los Logs A Una Sola Ubicación para Su RevisiónMarcosNessuna valutazione finora
- Determinar Si Se Puede Confiar en La Fecha y Hora de Los PeriódicosDocumento1 paginaDeterminar Si Se Puede Confiar en La Fecha y Hora de Los PeriódicosMarcosNessuna valutazione finora
- Análisis Automatizado de Registros y Seguridad Con ServicePilotDocumento1 paginaAnálisis Automatizado de Registros y Seguridad Con ServicePilotMarcosNessuna valutazione finora
- PersonasDocumento1 paginaPersonasMarcosNessuna valutazione finora
- Contenido Mínimo Del MóduloDocumento2 pagineContenido Mínimo Del MóduloMarcosNessuna valutazione finora
- Dirigido A: Talleres Ó Particulares. Contenido: Este Manual de Servicio Electrónico (ESM), Se Ha Preparado Con El ObjetoDocumento1 paginaDirigido A: Talleres Ó Particulares. Contenido: Este Manual de Servicio Electrónico (ESM), Se Ha Preparado Con El ObjetoMarcosNessuna valutazione finora
- Cambio de FormularioDocumento1 paginaCambio de FormularioMarcosNessuna valutazione finora
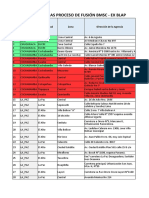
- Agencias - 20 07 2017Documento8 pagineAgencias - 20 07 2017MarcosNessuna valutazione finora
- Los Andes Usuarios NacionalDocumento6 pagineLos Andes Usuarios NacionalMarcosNessuna valutazione finora
- EtanolDocumento5 pagineEtanolMarcosNessuna valutazione finora
- Oper.1311.222.1.t3 - Embotelladora San MiguelDocumento18 pagineOper.1311.222.1.t3 - Embotelladora San MiguelRichard VillanuevaNessuna valutazione finora
- Aplicaciones en La SaludDocumento3 pagineAplicaciones en La SaludJhosue MundacaNessuna valutazione finora
- Taller de Tipografía Unos Tipos DurosDocumento2 pagineTaller de Tipografía Unos Tipos DurosSaúl GómezNessuna valutazione finora
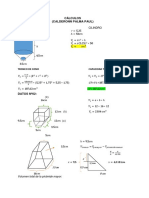
- CALCULOS de TolvaDocumento6 pagineCALCULOS de TolvapaulNessuna valutazione finora
- Virtualianet Los 7 Mejores Sitios de TeletrabajoDocumento23 pagineVirtualianet Los 7 Mejores Sitios de TeletrabajoDaniel Ortiz FreireNessuna valutazione finora
- Cardiometabolic+Food+Plan 1400-1800 SpanishDocumento2 pagineCardiometabolic+Food+Plan 1400-1800 Spanishcamelie100% (1)
- Guía de Diagnóstico, Tratamiento Nutricional y Rehabilitador de La Disfagia OrofaríngeaDocumento215 pagineGuía de Diagnóstico, Tratamiento Nutricional y Rehabilitador de La Disfagia OrofaríngeaFrancisco Watt50% (4)
- Ensayo Convenio de VienaDocumento2 pagineEnsayo Convenio de VienaEWART OVIDIO PADILLA MARTINEZNessuna valutazione finora
- EKAHAU - Starting Guide - Ed02Documento22 pagineEKAHAU - Starting Guide - Ed02ferneyNessuna valutazione finora
- Taller de Redacción - Segundo Semestre PDFDocumento170 pagineTaller de Redacción - Segundo Semestre PDFShugenja Musha ShugyoNessuna valutazione finora
- Memoria Descriptiva Estructuras Los PortalesDocumento5 pagineMemoria Descriptiva Estructuras Los PortalesAlexanderCabreraVásquezNessuna valutazione finora
- Examen Unidad 3 MicroeconomiaDocumento7 pagineExamen Unidad 3 MicroeconomiawillingtonNessuna valutazione finora
- Taller #7 Comprensión LectoraDocumento6 pagineTaller #7 Comprensión LectoraYurey Peral67% (6)
- Plan Maestro Ibagué 1Documento138 paginePlan Maestro Ibagué 1Karolina GalindoNessuna valutazione finora
- Calculo de Score y Digestibilidad Paso A PasoDocumento20 pagineCalculo de Score y Digestibilidad Paso A PasoKarel Bernt33% (6)
- Tema 1 Diagnóstico Situacional de La Salud Mental Del Personal de La Salud en El Contexto Del COVID-19 PDFDocumento12 pagineTema 1 Diagnóstico Situacional de La Salud Mental Del Personal de La Salud en El Contexto Del COVID-19 PDFJosé PlasenciaNessuna valutazione finora
- Texto Complementario 2021Documento13 pagineTexto Complementario 2021sofia salvadorNessuna valutazione finora
- Personas Juridicas No InscritasDocumento2 paginePersonas Juridicas No InscritasAlex Job Ñiquen Ucancial64% (11)
- Planificación de Clases y Materiales de ManicuraDocumento6 paginePlanificación de Clases y Materiales de ManicuraAna Paula PerronNessuna valutazione finora
- Prueba Comprensiva de QuintoDocumento8 paginePrueba Comprensiva de QuintoElieth AlvarezNessuna valutazione finora
- Mandos MediosDocumento7 pagineMandos MediosGY HERNANDEZNessuna valutazione finora
- (ACP-S06) Avance de Trabajo Final Calificado - TB1Documento12 pagine(ACP-S06) Avance de Trabajo Final Calificado - TB1Cris KrisNessuna valutazione finora
- Formato Guía para Elaborar Un PIAR (Tomado de Una I E)Documento6 pagineFormato Guía para Elaborar Un PIAR (Tomado de Una I E)Degnnys paola Monroy hernandezNessuna valutazione finora
- Tesis Carrera Psicología Salario EmocionalDocumento21 pagineTesis Carrera Psicología Salario EmocionalCONSET CONSULTORESNessuna valutazione finora
- EVALUACIONES REFLEXIVAS MATEMATICA PRIMER QUIMESTRE 7mos A-B-C MatutinaDocumento4 pagineEVALUACIONES REFLEXIVAS MATEMATICA PRIMER QUIMESTRE 7mos A-B-C MatutinaGABRIELA ANGIE JACOME LANDETANessuna valutazione finora
- 0501JA - BSH ELECTRODOMESTICOS S.A.C. - Mantenimiento de Ablandador de 1...Documento3 pagine0501JA - BSH ELECTRODOMESTICOS S.A.C. - Mantenimiento de Ablandador de 1...Yanina AliagaNessuna valutazione finora
- Taller de Enlaces QuimicosDocumento3 pagineTaller de Enlaces QuimicosCarmen MNessuna valutazione finora
- FacturaDocumento1 paginaFacturaGiovanny MarroquinNessuna valutazione finora
- Analisis FODADocumento3 pagineAnalisis FODADARK_ENGHELNessuna valutazione finora