Potrebbero piacerti anche
- Cad 2 PDFDocumento39 pagineCad 2 PDFBruno HuppNessuna valutazione finora
- 04 - Manual de Exercicios FisicosDocumento14 pagine04 - Manual de Exercicios FisicosPatryck TeixeiraNessuna valutazione finora
- 19.06.2017 Programação de Capacitações Junho 2018Documento3 pagine19.06.2017 Programação de Capacitações Junho 2018fabioNessuna valutazione finora
- Dimensionamento de Um Sistema Off Grid de Renovação de Água Marinha em Uma Instalação de Pesquisa Na Ilha Dos ArvoredosDocumento11 pagineDimensionamento de Um Sistema Off Grid de Renovação de Água Marinha em Uma Instalação de Pesquisa Na Ilha Dos ArvoredosfabioNessuna valutazione finora
- Sucesso Na Gestão - Capacitação IEL SEBRAEDocumento8 pagineSucesso Na Gestão - Capacitação IEL SEBRAEfabioNessuna valutazione finora
- Manual para Acesso A Rede DITEC PDFDocumento13 pagineManual para Acesso A Rede DITEC PDFfabioNessuna valutazione finora
- SolidWorks PDFDocumento42 pagineSolidWorks PDFRenatoGolinNessuna valutazione finora
- Alimentos Pre-Treinos e ReceitasDocumento7 pagineAlimentos Pre-Treinos e ReceitasfabioNessuna valutazione finora
- Espanhol Aplicado Ao Mundo Do TrabalhoDocumento43 pagineEspanhol Aplicado Ao Mundo Do TrabalhofabioNessuna valutazione finora
- 2017 10 24-Checklist-CurrículoDocumento2 pagine2017 10 24-Checklist-CurrículofabioNessuna valutazione finora
- Benne Den - Essencia PDFDocumento238 pagineBenne Den - Essencia PDFMarselle AndradeNessuna valutazione finora
- Cad 2 PDFDocumento39 pagineCad 2 PDFBruno HuppNessuna valutazione finora
- Especial Trainee Final 1Documento30 pagineEspecial Trainee Final 1Isabela PompeuNessuna valutazione finora
- 4 Avaliação DinâmicaDocumento3 pagine4 Avaliação Dinâmicafabio100% (1)
- Apnt 005 2Documento31 pagineApnt 005 2Julyanne RodriguesNessuna valutazione finora
- Lubrificação FabioDocumento7 pagineLubrificação FabiofabioNessuna valutazione finora
- MCM Apostila Capitulo01 PDFDocumento7 pagineMCM Apostila Capitulo01 PDFHebert NiceNessuna valutazione finora
- Elaboracao Aula 5 - Regra Da Alavanca PDFDocumento50 pagineElaboracao Aula 5 - Regra Da Alavanca PDFfabio100% (1)
- Apresentações MCIDocumento1 paginaApresentações MCIfabioNessuna valutazione finora
- Mecanica VetorialDocumento351 pagineMecanica Vetorialdedeprota83% (6)
- Alterações Do Pescado Por MicrorganismosDocumento2 pagineAlterações Do Pescado Por MicrorganismosfabioNessuna valutazione finora
- Diagramas TernáriosDocumento10 pagineDiagramas TernáriosPaulo FreireNessuna valutazione finora
- Classificação e NomenclaturaDocumento19 pagineClassificação e NomenclaturafabioNessuna valutazione finora
- Significado Das CoresDocumento2 pagineSignificado Das CoresfabioNessuna valutazione finora
- Regras Nomes e Simbolos de Unidades PDFDocumento23 pagineRegras Nomes e Simbolos de Unidades PDFfabioNessuna valutazione finora
- Resumo Recomposto Por LUCIANODocumento1 paginaResumo Recomposto Por LUCIANOfabioNessuna valutazione finora
- Objetiv OsDocumento12 pagineObjetiv OsfabioNessuna valutazione finora
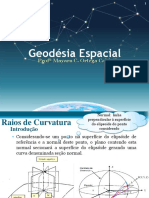
- Aula 4-Raios de Curvatura N M e Posio X Y Z PDFDocumento19 pagineAula 4-Raios de Curvatura N M e Posio X Y Z PDFTatiane CunhaNessuna valutazione finora
- Livro 01 - Governo Oculto Mundo PDFDocumento179 pagineLivro 01 - Governo Oculto Mundo PDFFernando Magusteiro100% (2)
- Ramatis Evolução No Planeta Azul (Marcado)Documento138 pagineRamatis Evolução No Planeta Azul (Marcado)andreia_bueno100% (1)
- 1 Manual Cotação Funcional e GeométricaDocumento33 pagine1 Manual Cotação Funcional e GeométricaRicardo SousaNessuna valutazione finora
- Bem Vindos Ao Novo TempoDocumento12 pagineBem Vindos Ao Novo TempoSerGioJúniorNessuna valutazione finora
- Monografia - Dominique AbelhasDocumento32 pagineMonografia - Dominique AbelhasDenise Fabiana FigueiredoNessuna valutazione finora
- Licoes de Calculo Integral em Varias VariaveisDocumento100 pagineLicoes de Calculo Integral em Varias VariaveisJuliano Sartorelli100% (1)
- Planetas PDFDocumento5 paginePlanetas PDFHecherNessuna valutazione finora
- Resumo FQ - 9º Ano - 1º CapítuloDocumento8 pagineResumo FQ - 9º Ano - 1º CapítuloGracia RodriguesNessuna valutazione finora
- Artigo Grebot AlmeidaDocumento10 pagineArtigo Grebot AlmeidaAmanda AraújoNessuna valutazione finora
- O Mito Germânico de CriaçãoDocumento2 pagineO Mito Germânico de CriaçãoRac A BruxaNessuna valutazione finora
- 2005 AFA FisicaDocumento4 pagine2005 AFA FisicaRamon Da MattaNessuna valutazione finora
- Banner Encontros UniversitáriosDocumento1 paginaBanner Encontros UniversitáriosGustavo BarbosaNessuna valutazione finora
- Taoism oDocumento11 pagineTaoism oluizzzfNessuna valutazione finora
- BQ V1 Cap 08Documento5 pagineBQ V1 Cap 08Fernando Willy MedeirosNessuna valutazione finora
- Dinamica para MoxicoDocumento8 pagineDinamica para MoxicoAntonio Mvakala DiabanzaNessuna valutazione finora
- Mapa Védico Do Thor BatistaDocumento3 pagineMapa Védico Do Thor BatistaelaineestrelaNessuna valutazione finora
- Marcelo Gleiser - Sobre A VerdadeDocumento1 paginaMarcelo Gleiser - Sobre A VerdadeCristianoMSouzaNessuna valutazione finora
- Relatório - Segunda Lei de NewtonDocumento12 pagineRelatório - Segunda Lei de NewtonRicardo Vital Barroso100% (2)
- Et de H00 004 - ADocumento7 pagineEt de H00 004 - AmcguimaraesNessuna valutazione finora
- Sigilos MágicosDocumento23 pagineSigilos MágicosGetúlio Netto100% (12)
- Apostila Movimento Harmonico Simples (MHS)Documento19 pagineApostila Movimento Harmonico Simples (MHS)Igor PessoaNessuna valutazione finora
- Kuan Yin NyoraiDocumento24 pagineKuan Yin NyoraiEdgar Martins100% (12)
- Bruxaria Sem Dogmas - Quais Coisas São Regidas Pela Lua PDFDocumento1 paginaBruxaria Sem Dogmas - Quais Coisas São Regidas Pela Lua PDFFrancisco Silva0% (1)
- Blog AstroShakti Diário de Rahu e KetuDocumento5 pagineBlog AstroShakti Diário de Rahu e KetualexandreNessuna valutazione finora
- A TEORIA DA CRIAÇÃO DO UNIVERSO Por ChatGPTDocumento6 pagineA TEORIA DA CRIAÇÃO DO UNIVERSO Por ChatGPTIago Leote100% (1)
- Cosmologia PDFDocumento10 pagineCosmologia PDFIspaide IdilécioNessuna valutazione finora
- Astronomia AntigaDocumento4 pagineAstronomia Antigalorrana2701Nessuna valutazione finora
- Collegium Ad LVX Et NOX - Apostila de Sistemas PlanetariosDocumento22 pagineCollegium Ad LVX Et NOX - Apostila de Sistemas Planetarioskwikchromium100% (2)
- 2 Teste de Fisico Quimica-CorrecaoDocumento8 pagine2 Teste de Fisico Quimica-CorrecaoDiana MirandaNessuna valutazione finora