Potrebbero piacerti anche
- Brenda Patton Guided Reflection QuestionsDocumento3 pagineBrenda Patton Guided Reflection QuestionsCameron JanzenNessuna valutazione finora
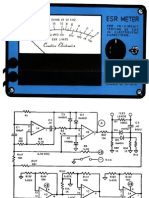
- ESR Meter Package PDFDocumento5 pagineESR Meter Package PDFOscar PachecoNessuna valutazione finora
- Error Amplifier Design and ApplicationsDocumento6 pagineError Amplifier Design and ApplicationsGhulam Abbas100% (1)
- DRSSTCDocumento7 pagineDRSSTCGabriel Droguett Olea100% (1)
- Hands-On Introduction To LabVIEW and Data Acquisition With NI CompactDAQ PDFDocumento33 pagineHands-On Introduction To LabVIEW and Data Acquisition With NI CompactDAQ PDFBiswajit SinghNessuna valutazione finora
- Caeneus and PoseidonDocumento77 pagineCaeneus and PoseidonSabrina CareyNessuna valutazione finora
- Engineers Note - Capacitors Are Key To Voltage Regulator Design - EE TimesDocumento12 pagineEngineers Note - Capacitors Are Key To Voltage Regulator Design - EE TimeskamranishfaqNessuna valutazione finora
- JAT501 DesignDocumento5 pagineJAT501 DesignIvanNessuna valutazione finora
- Transistor PA Bias CircuitsDocumento9 pagineTransistor PA Bias CircuitsDefaultAnomoly100% (1)
- Bias Circuits For RF DevicesDocumento18 pagineBias Circuits For RF DevicesMe Eng Mas100% (1)
- Decoupling TechniquesDocumento14 pagineDecoupling TechniquesTrọng ToànNessuna valutazione finora
- Opamp Linear Device 1300847494 PDFDocumento12 pagineOpamp Linear Device 1300847494 PDFNini FarribasNessuna valutazione finora
- Tuen Voltage AmplifirDocumento8 pagineTuen Voltage Amplifirkaran007_mNessuna valutazione finora
- JAT501 DesignDocumento6 pagineJAT501 DesignComputer World sbyNessuna valutazione finora
- Theory of Switched Mode Power SupplyDocumento21 pagineTheory of Switched Mode Power Supplyseahate100% (1)
- Transistor 1Documento8 pagineTransistor 1Nipun chamikaNessuna valutazione finora
- RF VM 2017Documento3 pagineRF VM 2017DayaSubramani100% (1)
- Using Bipolar Transistors As SwitchesDocumento15 pagineUsing Bipolar Transistors As SwitchesgpopeNessuna valutazione finora
- Automatic IR Tap ControllerDocumento67 pagineAutomatic IR Tap ControllerAnkit88% (16)
- Mod 4 Book 2 Transistors Intergrated Circuits Printed Circuit BoardsDocumento61 pagineMod 4 Book 2 Transistors Intergrated Circuits Printed Circuit Boardsranjit prasadNessuna valutazione finora
- Regulated DC Power Supply Lab AssignmentDocumento17 pagineRegulated DC Power Supply Lab AssignmentSebastien Paul100% (1)
- Experiment 3 Eng NaderDocumento7 pagineExperiment 3 Eng Naderياسر العويطيNessuna valutazione finora
- An 1031Documento15 pagineAn 1031suvamit87Nessuna valutazione finora
- EMC Filter For DCDC Switching Controller OptimizedDocumento6 pagineEMC Filter For DCDC Switching Controller OptimizedPetr BruzaNessuna valutazione finora
- Another Interesting Circuit From Burt Design PadDocumento13 pagineAnother Interesting Circuit From Burt Design PadmoisesHolaNessuna valutazione finora
- Act 4065Documento9 pagineAct 4065bob75Nessuna valutazione finora
- EMI Conducted InterferenceDocumento12 pagineEMI Conducted Interferencee175470_rmqkr_netNessuna valutazione finora
- MI Q-MeterDocumento14 pagineMI Q-MeterIvan LukićNessuna valutazione finora
- Lm331 AppnoteDocumento8 pagineLm331 AppnoteEward KenNessuna valutazione finora
- A Simple Regen Radio For Beginner NotesDocumento3 pagineA Simple Regen Radio For Beginner NotesMR X100% (1)
- General Description Features: Wide Input 3A Step-Down ConverterDocumento10 pagineGeneral Description Features: Wide Input 3A Step-Down Converterban4444Nessuna valutazione finora
- Bias Circuits For RF Devices PDFDocumento20 pagineBias Circuits For RF Devices PDFVivan GurjarNessuna valutazione finora
- Constant Current SourceDocumento5 pagineConstant Current SourceAnonymous TPVfFif6TONessuna valutazione finora
- NJ 10 WDocumento14 pagineNJ 10 WmuszereszNessuna valutazione finora
- Bias Circuits For RF DevicesDocumento20 pagineBias Circuits For RF Devicesmaheshsamanapally100% (1)
- Bias Circuits For RF Devices: Iulian Rosu, YO3DAC / VA3IULDocumento25 pagineBias Circuits For RF Devices: Iulian Rosu, YO3DAC / VA3IULRossi Paulo100% (1)
- Capacitance Multiplier Power Supply FilterDocumento10 pagineCapacitance Multiplier Power Supply FilterBiju jpNessuna valutazione finora
- Em ReportDocumento7 pagineEm Reportkashafnasir9977Nessuna valutazione finora
- Power Supplies: Transducers AC and DC Diodes CapacitorsDocumento10 paginePower Supplies: Transducers AC and DC Diodes CapacitorsJose C. Lita JrNessuna valutazione finora
- 4029INSTRUMENTTRANSFORMERSDocumento95 pagine4029INSTRUMENTTRANSFORMERSmuaz_aminu1422100% (2)
- Common Emitter Transistor Amplifier BasicsDocumento9 pagineCommon Emitter Transistor Amplifier BasicssalmanNessuna valutazione finora
- Single PhasingDocumento41 pagineSingle PhasingdiljithNessuna valutazione finora
- AppEMC 13 P3Documento28 pagineAppEMC 13 P3yanuar1976Nessuna valutazione finora
- Power Tips - Calculate An R-C Snubber in Seven Steps - Power Management - Technical Articles PDFDocumento4 paginePower Tips - Calculate An R-C Snubber in Seven Steps - Power Management - Technical Articles PDFBookymanNessuna valutazione finora
- RF Controlled ApplianceDocumento14 pagineRF Controlled ApplianceNEX456Nessuna valutazione finora
- LM317 AppnoteDocumento6 pagineLM317 AppnoteLucas Matías JuarezNessuna valutazione finora
- INSTRUMENTTRANSFORMERSDocumento95 pagineINSTRUMENTTRANSFORMERSmuaz_aminu1422Nessuna valutazione finora
- Application Note 69 September 1996 Lt1575 Ultrafast Linear Controller Makes Fast Transient Response Power SuppliesDocumento12 pagineApplication Note 69 September 1996 Lt1575 Ultrafast Linear Controller Makes Fast Transient Response Power SuppliesHahdNessuna valutazione finora
- 25839-Designing Offline Ac DC Switching Power Supplies Brick by Brick PDFDocumento9 pagine25839-Designing Offline Ac DC Switching Power Supplies Brick by Brick PDFAshwin KonaleNessuna valutazione finora
- Centre Tapped Transformer SpecificationsDocumento4 pagineCentre Tapped Transformer SpecificationsALNATRON GROUPSNessuna valutazione finora
- Current Sensor Ic 4017Documento55 pagineCurrent Sensor Ic 4017Alan RejiNessuna valutazione finora
- Ecler Pam2000 Pam2600 Power Amplifier Service ManualDocumento107 pagineEcler Pam2000 Pam2600 Power Amplifier Service Manuallluissb92% (12)
- 2009 Homebrew Challenge 50 Watt Amplifier EntryDocumento52 pagine2009 Homebrew Challenge 50 Watt Amplifier EntrydodicNessuna valutazione finora
- Switched Mode Power SupplyDocumento153 pagineSwitched Mode Power SupplyIvan222244Nessuna valutazione finora
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Da EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Valutazione: 2.5 su 5 stelle2.5/5 (3)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Da EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Nessuna valutazione finora
- Power Supply Projects: A Collection of Innovative and Practical Design ProjectsDa EverandPower Supply Projects: A Collection of Innovative and Practical Design ProjectsValutazione: 3 su 5 stelle3/5 (2)
- Audio IC Projects: A Collection of Useful Circuits Based on Readily Available ChipsDa EverandAudio IC Projects: A Collection of Useful Circuits Based on Readily Available ChipsNessuna valutazione finora
- Analog Circuit Design: A Tutorial Guide to Applications and SolutionsDa EverandAnalog Circuit Design: A Tutorial Guide to Applications and SolutionsValutazione: 3.5 su 5 stelle3.5/5 (6)
- GATE Notes - Operating System Part-IIDocumento10 pagineGATE Notes - Operating System Part-IIBiswajit SinghNessuna valutazione finora
- Ultra-Low Pressure Digital Sensor: SM9333/SM9336 Series Differential Pressure SensorsDocumento19 pagineUltra-Low Pressure Digital Sensor: SM9333/SM9336 Series Differential Pressure SensorsBiswajit SinghNessuna valutazione finora
- What Circuits Textbooks Haven T Told You About Feedback Amplifier and Transistor Port ImpedancesDocumento9 pagineWhat Circuits Textbooks Haven T Told You About Feedback Amplifier and Transistor Port ImpedancesBiswajit SinghNessuna valutazione finora
- Parasitic Turn-On of Power MOSFETDocumento7 pagineParasitic Turn-On of Power MOSFETBiswajit SinghNessuna valutazione finora
- Gher OrderDocumento29 pagineGher OrderBiswajit SinghNessuna valutazione finora
- A Low-Cost PC-Based Virtual Oscilloscope: IEEE Transactions On Education June 2004Documento6 pagineA Low-Cost PC-Based Virtual Oscilloscope: IEEE Transactions On Education June 2004Biswajit SinghNessuna valutazione finora
- Medical Fitness Criteria: For UPSC Engineering ServicesDocumento6 pagineMedical Fitness Criteria: For UPSC Engineering ServicesBiswajit SinghNessuna valutazione finora
- Adas en Ces C-S FS 160308 PDFDocumento2 pagineAdas en Ces C-S FS 160308 PDFBiswajit SinghNessuna valutazione finora
- A Picture Is Worth A Thousand Words-1 PDFDocumento39 pagineA Picture Is Worth A Thousand Words-1 PDFBiswajit SinghNessuna valutazione finora
- Control System by Sujal Sir (9574234622) For GateDocumento268 pagineControl System by Sujal Sir (9574234622) For GateBiswajit SinghNessuna valutazione finora
- Making Your Own Development BoardDocumento6 pagineMaking Your Own Development BoardBiswajit SinghNessuna valutazione finora
- AN-1248 Application Note: SPI InterfaceDocumento8 pagineAN-1248 Application Note: SPI InterfaceBiswajit SinghNessuna valutazione finora
- Servo Controlled FBW With Power Boost Control, Operations & Maint. ManualDocumento126 pagineServo Controlled FBW With Power Boost Control, Operations & Maint. ManualKota NatarajanNessuna valutazione finora
- Bài 1: Fill in The Blank With Present Simple, Present Continuous or Past SimpleDocumento6 pagineBài 1: Fill in The Blank With Present Simple, Present Continuous or Past SimplePhương Anh Đỗ NgọcNessuna valutazione finora
- TL K1 2 1 04 VSD35 Varyset DE enDocumento25 pagineTL K1 2 1 04 VSD35 Varyset DE enAkilaJosephNessuna valutazione finora
- Paintings of Juan LunaDocumento39 paginePaintings of Juan LunaMiss MellowNessuna valutazione finora
- Cigarettes and AlcoholDocumento1 paginaCigarettes and AlcoholHye Jin KimNessuna valutazione finora
- WPP Jak Campus - Defect All Level - 18042023Documento15 pagineWPP Jak Campus - Defect All Level - 18042023bbm FebriNessuna valutazione finora
- Module IiDocumento5 pagineModule IiFahmi PrayogiNessuna valutazione finora
- Lexus JTJBT20X740057503 AllSystemDTC 20230702045631Documento2 pagineLexus JTJBT20X740057503 AllSystemDTC 20230702045631Venerable DezzyNessuna valutazione finora
- EnglishDocumento18 pagineEnglishSarah SiddiquiNessuna valutazione finora
- GP 24-21 - Fire Hazard AnalysisDocumento53 pagineGP 24-21 - Fire Hazard AnalysisJohn DryNessuna valutazione finora
- Rockwell Allen BradleyDocumento73 pagineRockwell Allen BradleymaygomezNessuna valutazione finora
- Volume 2 Part 1 - Civil & Arch SpecificationsDocumento173 pagineVolume 2 Part 1 - Civil & Arch Specificationsanish100% (1)
- Analisis Keterampilan Berpikir Kritis Mahasiswa Pada Materi KinematikaDocumento11 pagineAnalisis Keterampilan Berpikir Kritis Mahasiswa Pada Materi KinematikaTrisnaNessuna valutazione finora
- Introduction To Second Quantization: 1.1 Single-Particle Hilbert SpaceDocumento6 pagineIntroduction To Second Quantization: 1.1 Single-Particle Hilbert Space김띵Nessuna valutazione finora
- 0707-Passive VoiceDocumento6 pagine0707-Passive VoiceKhôi TrầnNessuna valutazione finora
- Quiz Business MathDocumento5 pagineQuiz Business MathMA. JEMARIS SOLISNessuna valutazione finora
- Massimo Cacciari, 1994. The Necessary AngelDocumento133 pagineMassimo Cacciari, 1994. The Necessary AngelAbner J ColmenaresNessuna valutazione finora
- Ar ExportsDocumento1 paginaAr ExportsRais AlamNessuna valutazione finora
- KRC1 Start-Up PDFDocumento29 pagineKRC1 Start-Up PDFRafael50% (2)
- Ashok Leyland Project ReportDocumento40 pagineAshok Leyland Project ReportGovind kumarNessuna valutazione finora
- Aoc f22sDocumento43 pagineAoc f22sJoao Jose Santos NetoNessuna valutazione finora
- Nonmelanoma Skin Cancer: Prof - Dr.Dr. Teguh Aryandono, SPB (K) Onk Division of Surgical Oncology, GmuDocumento22 pagineNonmelanoma Skin Cancer: Prof - Dr.Dr. Teguh Aryandono, SPB (K) Onk Division of Surgical Oncology, GmuFazaKhilwanAmnaNessuna valutazione finora
- Indian Standard: Methods of Chemical Testing of LeatherDocumento75 pagineIndian Standard: Methods of Chemical Testing of LeatherAshish DixitNessuna valutazione finora
- Surface & Subsurface Geotechnical InvestigationDocumento5 pagineSurface & Subsurface Geotechnical InvestigationAshok Kumar SahaNessuna valutazione finora
- 2011 33 MaintenanceDocumento16 pagine2011 33 MaintenanceKrishna Khandige100% (1)
- It Park Design Submission PDFDocumento20 pagineIt Park Design Submission PDFSAKET TYAGI100% (1)
- Cot 3Documento16 pagineCot 3jaycel cynthiaNessuna valutazione finora
- Sorsogon State College Engineering & ArchitectureDocumento11 pagineSorsogon State College Engineering & ArchitectureArianne Mae De Vera GallonNessuna valutazione finora