Potrebbero piacerti anche
- Avionics System For A Small Unmanned Helicopter Performing Agressive ManeuversDocumento7 pagineAvionics System For A Small Unmanned Helicopter Performing Agressive ManeuversAnas NassarNessuna valutazione finora
- Towards Intelligent Miniature Flying RobotsDocumento12 pagineTowards Intelligent Miniature Flying RobotsAlexandreSidantNessuna valutazione finora
- 10.2478 - Sbeef 2022 0018Documento6 pagine10.2478 - Sbeef 2022 0018Sudh Desi ContentsNessuna valutazione finora
- PID Vs LQ Control Techniques Applied To An Indoor Micro QuadrotorDocumento6 paginePID Vs LQ Control Techniques Applied To An Indoor Micro QuadrotorAlexandreSidantNessuna valutazione finora
- One: Introduction and FeaturesDocumento59 pagineOne: Introduction and Featurestharun100% (2)
- Mathematical Modelling and Attitude Control of Quadcopter Based On Classical ControllerDocumento7 pagineMathematical Modelling and Attitude Control of Quadcopter Based On Classical ControllerdrenridaNessuna valutazione finora
- Hybrid PID LQ Quadrotor ControllerDocumento14 pagineHybrid PID LQ Quadrotor ControllerGhada BeydounNessuna valutazione finora
- Roll Attitude Control of A Space VehicleDocumento10 pagineRoll Attitude Control of A Space VehicleinventyNessuna valutazione finora
- PID VS: LQ Control Techniques Applied To An Indoor Micro QuadrotorDocumento6 paginePID VS: LQ Control Techniques Applied To An Indoor Micro QuadrotorMikoto RifkyNessuna valutazione finora
- SAI TM Research Symposium on Engineering Advancements 2014Documento5 pagineSAI TM Research Symposium on Engineering Advancements 2014ವಿಶ್ವ ಚೆತನ್ ಗೌಡNessuna valutazione finora
- Design of A Quadcopter With A Hand Glove ControlDocumento5 pagineDesign of A Quadcopter With A Hand Glove Controlashok pandiyanNessuna valutazione finora
- Quadcopter PDFDocumento6 pagineQuadcopter PDFOla Fonda100% (1)
- Spherical Vtol UavDocumento8 pagineSpherical Vtol UavPranab PrustyNessuna valutazione finora
- Supplementary Material For: Controlled Flight of A Biologically Inspired, Insect-Scale RobotDocumento14 pagineSupplementary Material For: Controlled Flight of A Biologically Inspired, Insect-Scale RobotsamanNessuna valutazione finora
- Altitude Controller Design For Multi-Copter UAVDocumento6 pagineAltitude Controller Design For Multi-Copter UAVPRACHI KATARENessuna valutazione finora
- Primary Design: Statement of The ProblemDocumento9 paginePrimary Design: Statement of The ProblemHimanshu SinhaNessuna valutazione finora
- Interfacing Matlab-2591 PDFDocumento8 pagineInterfacing Matlab-2591 PDFBourrasNessuna valutazione finora
- 6DOF Tracked Vehicle ModelDocumento6 pagine6DOF Tracked Vehicle ModelSumit PandeyNessuna valutazione finora
- Low-Cost Accelerometers For Robotic Manipulator PerceptionDocumento7 pagineLow-Cost Accelerometers For Robotic Manipulator PerceptionAbbé BusoniNessuna valutazione finora
- Design and Manufacturing of Quadcopter: August 2019Documento6 pagineDesign and Manufacturing of Quadcopter: August 2019RAM PRATAP MAHATONessuna valutazione finora
- Design and Manufacturing of Quadcopter: August 2019Documento6 pagineDesign and Manufacturing of Quadcopter: August 2019Diego Javier SchmidtNessuna valutazione finora
- Research Article Flight Dynamics Modeling and Dynamic Stability Analysis of Tilt-Rotor AircraftDocumento16 pagineResearch Article Flight Dynamics Modeling and Dynamic Stability Analysis of Tilt-Rotor AircraftMert ANessuna valutazione finora
- Design and Manufacturing of a QuadcopterDocumento6 pagineDesign and Manufacturing of a QuadcopterashokkumarNessuna valutazione finora
- Design and 3D Modelling of Vertical Take Off and Landing (Vtol) Tilt Quad Rotorrc AircraftDocumento6 pagineDesign and 3D Modelling of Vertical Take Off and Landing (Vtol) Tilt Quad Rotorrc AircraftTushar KoulNessuna valutazione finora
- 13g Ornithopter Flies Toward Target Using Onboard ControlDocumento8 pagine13g Ornithopter Flies Toward Target Using Onboard ControlkidzniaNessuna valutazione finora
- Design and Analysis of A Gyroscopically Controlled Micro Air VehicleDocumento20 pagineDesign and Analysis of A Gyroscopically Controlled Micro Air VehicleAndres MartinezNessuna valutazione finora
- Design and Manufacturing of QuadcopterDocumento6 pagineDesign and Manufacturing of QuadcopterCHANDAN SAMALNessuna valutazione finora
- Attitude Stabilization of Quadrotor Uav Using Backstepping Fuzzy Logic & Backstepping Least-Mean-Square Controllersal-Younes2008Documento11 pagineAttitude Stabilization of Quadrotor Uav Using Backstepping Fuzzy Logic & Backstepping Least-Mean-Square Controllersal-Younes2008Pedro Cezar Rodrigues BaltazarNessuna valutazione finora
- Jiaats Site Admin,+451 Article+Text 767 1 10 20171116Documento9 pagineJiaats Site Admin,+451 Article+Text 767 1 10 20171116Tanvi ChaudharyNessuna valutazione finora
- Uadcopter Drone: (Electrical 6Th Sem.)Documento51 pagineUadcopter Drone: (Electrical 6Th Sem.)Abhay GuptaNessuna valutazione finora
- Aerodynamics and Flight Control Design For Hovering Micro Air VehiclesDocumento3 pagineAerodynamics and Flight Control Design For Hovering Micro Air VehiclesRitesh SinghNessuna valutazione finora
- Development of An ROV Operated Both As Towed and Self-Propulsive VehicleDocumento43 pagineDevelopment of An ROV Operated Both As Towed and Self-Propulsive VehicleAntonio Carlos Bana ChiellaNessuna valutazione finora
- Control Architecture For A UAV-Mounted Pan/Tilt/Roll Camera GimbalDocumento10 pagineControl Architecture For A UAV-Mounted Pan/Tilt/Roll Camera GimbalMarcio PortsNessuna valutazione finora
- Carcopter - An Unmanned Aerial-cum-Road VehicleDocumento3 pagineCarcopter - An Unmanned Aerial-cum-Road VehicleShah TufailNessuna valutazione finora
- 20170000654Documento12 pagine20170000654tizio caglioNessuna valutazione finora
- VTOL Urban Air Mobility Concept Vehicles for Technology DevelopmentDocumento16 pagineVTOL Urban Air Mobility Concept Vehicles for Technology Developmentpec orange100% (1)
- DC Drive System For EscalatorDocumento29 pagineDC Drive System For EscalatorMamta Mrjn100% (2)
- Adaptive Neural Controller Stabilizes Quadrotor UAV Using MRASDocumento3 pagineAdaptive Neural Controller Stabilizes Quadrotor UAV Using MRASSyed MamnoonNessuna valutazione finora
- Digital Position Control Wraps Analog ServosDocumento5 pagineDigital Position Control Wraps Analog ServosJavier Jair Trejo GarcíaNessuna valutazione finora
- Australian Journal of Basic and Applied Sciences: AENSI JournalsDocumento14 pagineAustralian Journal of Basic and Applied Sciences: AENSI JournalsmoafrNessuna valutazione finora
- Modelling and Control of A Quad RotorDocumento26 pagineModelling and Control of A Quad Rotorshayant nandiNessuna valutazione finora
- MATLAB SIMULATIONS FOR GARNELL's PITCH AUTOPILOTDocumento8 pagineMATLAB SIMULATIONS FOR GARNELL's PITCH AUTOPILOTD.Viswanath100% (1)
- Autonomous Indoor Helicopter Flight using Single Onboard CameraDocumento8 pagineAutonomous Indoor Helicopter Flight using Single Onboard CameraAakash SheelvantNessuna valutazione finora
- Selection of Smooth Motion Profile For A Tube Locator Module of An Inspection DeviceDocumento15 pagineSelection of Smooth Motion Profile For A Tube Locator Module of An Inspection DeviceIAES International Journal of Robotics and AutomationNessuna valutazione finora
- Developing A Programme For Engine Design Calculations of A Commercial AirlinerDocumento12 pagineDeveloping A Programme For Engine Design Calculations of A Commercial AirlinerIJMERNessuna valutazione finora
- IEEE TRANSACTIONS ON ROBOTICS AND AUTOMATION, VOL. 7 , NO. 2, APRIL I991Documento12 pagineIEEE TRANSACTIONS ON ROBOTICS AND AUTOMATION, VOL. 7 , NO. 2, APRIL I991maysamshNessuna valutazione finora
- Validation of A Quad-Rotor Helicopter Matlab-Simulink and Solidworks Models - ABDocumento6 pagineValidation of A Quad-Rotor Helicopter Matlab-Simulink and Solidworks Models - ABriverajluizNessuna valutazione finora
- Performance Analysis of Medium Altitude Low-Cost Autonomous QuadcopterDocumento12 paginePerformance Analysis of Medium Altitude Low-Cost Autonomous Quadcoptermuhammed sirac erenNessuna valutazione finora
- Drone Build PartsDocumento7 pagineDrone Build PartsAngelica May BangayanNessuna valutazione finora
- Cable Driving RobotDocumento20 pagineCable Driving RobotSohail TanveerNessuna valutazione finora
- Paper HaackDocumento10 paginePaper HaackramihermouzeNessuna valutazione finora
- Aerodynamics of Wind TurbinesDocumento4 pagineAerodynamics of Wind TurbinesIoanna KaloNessuna valutazione finora
- 3101Documento10 pagine3101Madhavan Jayaraman100% (1)
- Article SMVDocumento28 pagineArticle SMVZERARKA Mohamed FawziNessuna valutazione finora
- Very Light Helicopter ShmelDocumento8 pagineVery Light Helicopter Shmeldreyber100% (1)
- Report 2Documento19 pagineReport 2itachiuchiha8402Nessuna valutazione finora
- Four-cable parallel robot kinematics and prototypeDocumento5 pagineFour-cable parallel robot kinematics and prototypeAlonso ChuizNessuna valutazione finora
- AD1181169Documento113 pagineAD1181169Vishnoo PrathapNessuna valutazione finora
- 34 Watt Solar Kit v1.1Documento20 pagine34 Watt Solar Kit v1.1Vishnoo PrathapNessuna valutazione finora
- drones-06-00043Documento26 paginedrones-06-00043Vishnoo PrathapNessuna valutazione finora
- XTEK Presentation - 22 November 22Documento19 pagineXTEK Presentation - 22 November 22Vishnoo PrathapNessuna valutazione finora
- History ActsDocumento1 paginaHistory ActsVishnoo PrathapNessuna valutazione finora
- Declaration From The Un PDFDocumento1 paginaDeclaration From The Un PDFVishnoo PrathapNessuna valutazione finora
- Brochure - IDS-2024Documento6 pagineBrochure - IDS-2024Vishnoo PrathapNessuna valutazione finora
- Tata Play FiberDocumento1 paginaTata Play Fiberaaryanpandit20032006Nessuna valutazione finora
- Join Our Growing Team! Exciting Opportunities Await - We're Expanding and Looking For Talented Individuals To Join Our JourneyDocumento1 paginaJoin Our Growing Team! Exciting Opportunities Await - We're Expanding and Looking For Talented Individuals To Join Our JourneyVishnoo PrathapNessuna valutazione finora
- ApitextDocumento9 pagineApitextVishnoo PrathapNessuna valutazione finora
- CSIR-CIMFR Application Form for Scientist PostDocumento9 pagineCSIR-CIMFR Application Form for Scientist PostVishnoo PrathapNessuna valutazione finora
- PolityDocumento9 paginePolityVishnoo PrathapNessuna valutazione finora
- Advt No 04 2019Documento5 pagineAdvt No 04 2019AjayChouhanNessuna valutazione finora
- Declaration From The Un PDFDocumento1 paginaDeclaration From The Un PDFVishnoo PrathapNessuna valutazione finora
- ApitextDocumento9 pagineApitextVishnoo PrathapNessuna valutazione finora
- ESCC Qualified Thermistor Devices for Satellite ApplicationsDocumento4 pagineESCC Qualified Thermistor Devices for Satellite ApplicationsVishnoo PrathapNessuna valutazione finora
- Connection VCC - 5v GND - GND Aout-A0Documento1 paginaConnection VCC - 5v GND - GND Aout-A0Vishnoo PrathapNessuna valutazione finora
- History Class 7 PDFDocumento154 pagineHistory Class 7 PDFdevanshuNessuna valutazione finora
- 2014.07.01 - Rev Scheme With Site & Column Location-ModelDocumento1 pagina2014.07.01 - Rev Scheme With Site & Column Location-ModelVishnoo PrathapNessuna valutazione finora
- Pycam Screen ShotsDocumento5 paginePycam Screen ShotsVishnoo PrathapNessuna valutazione finora
- GST Registration Guide by ProfitBooksDocumento24 pagineGST Registration Guide by ProfitBookssurinder vermaNessuna valutazione finora
- Dictionary of EconomicsDocumento225 pagineDictionary of EconomicsMushtak Shaikh100% (1)
- Write A CNC Part Programming of The Given Drawing by Using Simulation SoftwareDocumento3 pagineWrite A CNC Part Programming of The Given Drawing by Using Simulation SoftwareVishnoo PrathapNessuna valutazione finora
- 321 ManualDocumento136 pagine321 ManualVishnoo PrathapNessuna valutazione finora
- Intro to Electronic Circuit Design at StanfordDocumento48 pagineIntro to Electronic Circuit Design at Stanfordmauricio_mauad_1Nessuna valutazione finora
- Micro ControllerDocumento46 pagineMicro ControllerSundaram NatarajanNessuna valutazione finora
- Presentation Nautural Fibre Composite 11-06-2015Documento32 paginePresentation Nautural Fibre Composite 11-06-2015Vishnoo PrathapNessuna valutazione finora
- ArduinoDocumento13 pagineArduinoCabdiraxmaanmaxamed CabdiraxmaanmaxameddanNessuna valutazione finora
- Tensile Strength Paper Yilmaz Final PDFDocumento11 pagineTensile Strength Paper Yilmaz Final PDFVishnoo PrathapNessuna valutazione finora
- Energies 07 07067Documento27 pagineEnergies 07 07067Roozbeh PNessuna valutazione finora
- Reed BC Quantum Mechanics An Enhanced PrimerDocumento407 pagineReed BC Quantum Mechanics An Enhanced PrimerStrahinja DonicNessuna valutazione finora
- Asm Unit1square &square Root, Cube &cube Root, Linear EquationsDocumento3 pagineAsm Unit1square &square Root, Cube &cube Root, Linear EquationsanchitNessuna valutazione finora
- How Rebar Distribution Affects Concrete Beam Flexural StrengthDocumento10 pagineHow Rebar Distribution Affects Concrete Beam Flexural Strengthtoma97Nessuna valutazione finora
- Design and Analysis of an Indoor StadiumDocumento34 pagineDesign and Analysis of an Indoor StadiumChinnu Mohanan33% (6)
- Rangka Batang RhezaDocumento11 pagineRangka Batang RhezaKABINET JALADARA NABDANessuna valutazione finora
- S Parameter BasicsDocumento11 pagineS Parameter Basicslancelot795Nessuna valutazione finora
- Fault Location Estimation with AI TuningDocumento162 pagineFault Location Estimation with AI TuningJose Alberto RodriguezNessuna valutazione finora
- A Theory of Dynamic Oligopoly II Price Competition Kinked Demand Curves and Edgeworth CyclesDocumento29 pagineA Theory of Dynamic Oligopoly II Price Competition Kinked Demand Curves and Edgeworth CyclesGiovanna Larissa MendesNessuna valutazione finora
- Mathematics HL Paper 2 TZ2 PDFDocumento16 pagineMathematics HL Paper 2 TZ2 PDFMADANNessuna valutazione finora
- Ejercicios Jackson ElectrodinamicaDocumento46 pagineEjercicios Jackson ElectrodinamicahebertgoNessuna valutazione finora
- 01-04-2021 SR - Super60 & All Jee-Main GTM-16 Key & Sol'sDocumento12 pagine01-04-2021 SR - Super60 & All Jee-Main GTM-16 Key & Sol'sGowri ShankarNessuna valutazione finora
- QuizDocumento10 pagineQuizJohanna RullanNessuna valutazione finora
- Magnetic Field Splitting of Spectral LinesDocumento2 pagineMagnetic Field Splitting of Spectral LinesSio MoNessuna valutazione finora
- POP 301 Production and Operations Management Final ExamDocumento2 paginePOP 301 Production and Operations Management Final ExamHabib A IslamNessuna valutazione finora
- Calculate stock indices and returnsDocumento5 pagineCalculate stock indices and returnsSiddhant AggarwalNessuna valutazione finora
- Rust Cheat SheetDocumento8 pagineRust Cheat Sheetnewgmail accountNessuna valutazione finora
- Javascript - Domain Fundamentals AssignmentsDocumento43 pagineJavascript - Domain Fundamentals AssignmentsSana Fathima SanaNessuna valutazione finora
- ICCM2014Documento28 pagineICCM2014chenlei07Nessuna valutazione finora
- Renormalization Made Easy, BaezDocumento11 pagineRenormalization Made Easy, BaezdbranetensionNessuna valutazione finora
- Asynchronous Activity 4: Case 1Documento3 pagineAsynchronous Activity 4: Case 1John Carlo TolentinoNessuna valutazione finora
- Water Refilling Station FeasibDocumento10 pagineWater Refilling Station FeasibOman OpredoNessuna valutazione finora
- Chapter Test 2 ReviewDocumento23 pagineChapter Test 2 ReviewSheila Mae AsuelaNessuna valutazione finora
- Simple Harmonic Motion and ElasticityDocumento105 pagineSimple Harmonic Motion and ElasticityyashveerNessuna valutazione finora
- PHAR 7633 Chapter 19 Multi-Compartment Pharmacokinetic ModelsDocumento23 paginePHAR 7633 Chapter 19 Multi-Compartment Pharmacokinetic ModelsBandameedi RamuNessuna valutazione finora
- Evolutionary Computation:: Genetic AlgorithmsDocumento49 pagineEvolutionary Computation:: Genetic AlgorithmsShobanraj LetchumananNessuna valutazione finora
- OrcafAPI ManualDocumento39 pagineOrcafAPI ManualgenmikNessuna valutazione finora
- 29a ΙΡΙΔΟΛΟΓΙΑ EGDocumento28 pagine29a ΙΡΙΔΟΛΟΓΙΑ EGO TΣΑΡΟΣ ΤΗΣ ΑΝΤΙΒΑΡΥΤΗΤΑΣ ΛΙΑΠΗΣ ΠΑΝΑΓΙΩΤΗΣNessuna valutazione finora
- Lecture 22Documento6 pagineLecture 22Rainesius DohlingNessuna valutazione finora
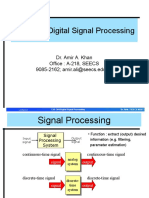
- CSE 304-Digital Signal Processing: Dr. Amir A. Khan Office: A-218, SEECS 9085-2162 Amir - Ali@seecs - Edu.pkDocumento22 pagineCSE 304-Digital Signal Processing: Dr. Amir A. Khan Office: A-218, SEECS 9085-2162 Amir - Ali@seecs - Edu.pkAlamgir Ahmad KhattakNessuna valutazione finora
- Fiziks: Jnu-Entrance Examination-2009 M.Sc. Physics Maximum Marks: 90 Instructions For CandidatesDocumento8 pagineFiziks: Jnu-Entrance Examination-2009 M.Sc. Physics Maximum Marks: 90 Instructions For CandidatessairajdreamNessuna valutazione finora
- The Grid: The Fraying Wires Between Americans and Our Energy FutureDa EverandThe Grid: The Fraying Wires Between Americans and Our Energy FutureValutazione: 3.5 su 5 stelle3.5/5 (48)
- Industrial Piping and Equipment Estimating ManualDa EverandIndustrial Piping and Equipment Estimating ManualValutazione: 5 su 5 stelle5/5 (7)
- Introduction to Power System ProtectionDa EverandIntroduction to Power System ProtectionValutazione: 5 su 5 stelle5/5 (1)
- Renewable Energy: A Very Short IntroductionDa EverandRenewable Energy: A Very Short IntroductionValutazione: 4.5 su 5 stelle4.5/5 (12)
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesDa EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesValutazione: 4.5 su 5 stelle4.5/5 (21)
- The Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialDa EverandThe Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialNessuna valutazione finora
- OFF-GRID PROJECTS: A Comprehensive Beginner's Guide to Learn All about OffGrid Living from A-Z and Live a Life of Self-SufficiencyDa EverandOFF-GRID PROJECTS: A Comprehensive Beginner's Guide to Learn All about OffGrid Living from A-Z and Live a Life of Self-SufficiencyNessuna valutazione finora
- Asset Integrity Management for Offshore and Onshore StructuresDa EverandAsset Integrity Management for Offshore and Onshore StructuresNessuna valutazione finora
- Handbook on Battery Energy Storage SystemDa EverandHandbook on Battery Energy Storage SystemValutazione: 4.5 su 5 stelle4.5/5 (2)
- Idaho Falls: The Untold Story of America's First Nuclear AccidentDa EverandIdaho Falls: The Untold Story of America's First Nuclear AccidentValutazione: 4.5 su 5 stelle4.5/5 (21)
- The New 3D Layout for Oil & Gas Offshore Projects: How to ensure successDa EverandThe New 3D Layout for Oil & Gas Offshore Projects: How to ensure successValutazione: 4.5 su 5 stelle4.5/5 (3)
- Shorting the Grid: The Hidden Fragility of Our Electric GridDa EverandShorting the Grid: The Hidden Fragility of Our Electric GridValutazione: 4.5 su 5 stelle4.5/5 (2)
- Flow Analysis for Hydrocarbon Pipeline EngineeringDa EverandFlow Analysis for Hydrocarbon Pipeline EngineeringNessuna valutazione finora
- Formulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsDa EverandFormulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsNessuna valutazione finora
- Build Your Own Electric Vehicle, Third EditionDa EverandBuild Your Own Electric Vehicle, Third EditionValutazione: 4.5 su 5 stelle4.5/5 (3)
- The Rare Metals War: the dark side of clean energy and digital technologiesDa EverandThe Rare Metals War: the dark side of clean energy and digital technologiesValutazione: 5 su 5 stelle5/5 (2)
- Transmission Pipeline Calculations and Simulations ManualDa EverandTransmission Pipeline Calculations and Simulations ManualValutazione: 4.5 su 5 stelle4.5/5 (10)
- Introduction to Power System ProtectionDa EverandIntroduction to Power System ProtectionNessuna valutazione finora
- Implementing an Integrated Management System (IMS): The strategic approachDa EverandImplementing an Integrated Management System (IMS): The strategic approachValutazione: 5 su 5 stelle5/5 (2)
- Nuclear Energy in the 21st Century: World Nuclear University PressDa EverandNuclear Energy in the 21st Century: World Nuclear University PressValutazione: 4.5 su 5 stelle4.5/5 (3)
- ISO 50001: A strategic guide to establishing an energy management systemDa EverandISO 50001: A strategic guide to establishing an energy management systemNessuna valutazione finora
- Energy, Light and Electricity - Introduction to Physics - Physics Book for 12 Year Old | Children's Physics BooksDa EverandEnergy, Light and Electricity - Introduction to Physics - Physics Book for 12 Year Old | Children's Physics BooksNessuna valutazione finora
- Operational Amplifier Circuits: Analysis and DesignDa EverandOperational Amplifier Circuits: Analysis and DesignValutazione: 4.5 su 5 stelle4.5/5 (2)
- The Boy Who Harnessed the Wind: Creating Currents of Electricity and HopeDa EverandThe Boy Who Harnessed the Wind: Creating Currents of Electricity and HopeValutazione: 4 su 5 stelle4/5 (130)
- Air-Cooled Condenser Fundamentals: Design, Operations, Troubleshooting, Maintenance, and Q&ADa EverandAir-Cooled Condenser Fundamentals: Design, Operations, Troubleshooting, Maintenance, and Q&AValutazione: 5 su 5 stelle5/5 (1)