Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- Layer 3 Managed 8 10G Port Switch Controller: RTL9303-CGDocumento55 pagineLayer 3 Managed 8 10G Port Switch Controller: RTL9303-CG박윤지100% (1)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Transformative Change at PPLDocumento24 pagineTransformative Change at PPLAli A. KhokhArNessuna valutazione finora
- Samrat Ashok Technological Institute, Vidisha: Recent PhotoDocumento7 pagineSamrat Ashok Technological Institute, Vidisha: Recent PhotoVikas GoyalNessuna valutazione finora
- Delhi Technological UniversityDocumento1 paginaDelhi Technological UniversityVikas GoyalNessuna valutazione finora
- Wide Area Control in Electric Power Systems Incorporating FACTS Controllers ReviewDocumento6 pagineWide Area Control in Electric Power Systems Incorporating FACTS Controllers ReviewVikas GoyalNessuna valutazione finora
- Walk-In: Air India Air Transport Services LimitedDocumento11 pagineWalk-In: Air India Air Transport Services LimitedVikas GoyalNessuna valutazione finora
- For July 2015 and January 2016 SessionsDocumento3 pagineFor July 2015 and January 2016 SessionsVikas GoyalNessuna valutazione finora
- 01 Cte-1,2,3,4,5 - 2015-2016Documento8 pagine01 Cte-1,2,3,4,5 - 2015-2016Vikas GoyalNessuna valutazione finora
- Affidavit: Deponent VerificationDocumento1 paginaAffidavit: Deponent VerificationVikas GoyalNessuna valutazione finora
- Electrical SyllabusDocumento1 paginaElectrical SyllabusVikas GoyalNessuna valutazione finora
- Faults Per Feeder Mile: Presented by Scott Peele PEDocumento24 pagineFaults Per Feeder Mile: Presented by Scott Peele PEVikas GoyalNessuna valutazione finora
- Ratlam Telecom District: Account SummaryDocumento1 paginaRatlam Telecom District: Account SummaryVikas GoyalNessuna valutazione finora
- 58Vol47No2SMALL SIGNAL ANALYSIS OF FLEXIBLE AC TRANSMISSION SYSTEM USING INTERLINE POWER FLOW CONTROLLER (IPFC)Documento12 pagine58Vol47No2SMALL SIGNAL ANALYSIS OF FLEXIBLE AC TRANSMISSION SYSTEM USING INTERLINE POWER FLOW CONTROLLER (IPFC)Vikas GoyalNessuna valutazione finora
- Global Review of Enhances Geothermal SystemDocumento20 pagineGlobal Review of Enhances Geothermal SystemKatherine RojasNessuna valutazione finora
- Presentation The New Condominium Rules 9 1 2018 PDFDocumento35 paginePresentation The New Condominium Rules 9 1 2018 PDFYe AungNessuna valutazione finora
- 1 48 Volt Parallel Battery System PSS-SOC - Step-By-Step VolvoDocumento11 pagine1 48 Volt Parallel Battery System PSS-SOC - Step-By-Step VolvoEyosyas NathanNessuna valutazione finora
- Evaporator EfficiencyDocumento15 pagineEvaporator EfficiencySanjaySinghAdhikariNessuna valutazione finora
- Definition of Sustainable Packaging PDFDocumento10 pagineDefinition of Sustainable Packaging PDFProf C.S.PurushothamanNessuna valutazione finora
- Sterling PumpeDocumento20 pagineSterling PumpesrdzaNessuna valutazione finora
- Pivacare Preventive-ServiceDocumento1 paginaPivacare Preventive-ServiceSadeq NeiroukhNessuna valutazione finora
- Medicinal Chemistry-Ii: 1.anti-Infective Agents: FDocumento14 pagineMedicinal Chemistry-Ii: 1.anti-Infective Agents: FAnonymous ionOPaqlkNessuna valutazione finora
- Print Design Business Model CanvasDocumento3 paginePrint Design Business Model CanvasMusic Da LifeNessuna valutazione finora
- Inkt Cables CabinetsDocumento52 pagineInkt Cables CabinetsvliegenkristofNessuna valutazione finora
- Soal TKM B. Inggris Kls XII Des. 2013Documento8 pagineSoal TKM B. Inggris Kls XII Des. 2013Sinta SilviaNessuna valutazione finora
- Sap On Cloud PlatformDocumento2 pagineSap On Cloud PlatformQueen ValleNessuna valutazione finora
- Sarah Williams CVDocumento2 pagineSarah Williams CVsarahcwilliamsNessuna valutazione finora
- RECRUITMENT AGENCIES IN U.A.E. (Here Is A List Containing 150+ Names)Documento22 pagineRECRUITMENT AGENCIES IN U.A.E. (Here Is A List Containing 150+ Names)raajc12380% (5)
- High-Definition Multimedia Interface SpecificationDocumento51 pagineHigh-Definition Multimedia Interface SpecificationwadrNessuna valutazione finora
- Fashion Designing Sample Question Paper1Documento3 pagineFashion Designing Sample Question Paper1Aditi VermaNessuna valutazione finora
- BW-Africa 2023 BrochureDocumento12 pagineBW-Africa 2023 BrochureDanial DarimiNessuna valutazione finora
- List of Newly and Migrated Programs For September 2022 - WebsiteDocumento21 pagineList of Newly and Migrated Programs For September 2022 - WebsiteRMG REPAIRNessuna valutazione finora
- Morales v. Lockheed Martin, 10th Cir. (2000)Documento2 pagineMorales v. Lockheed Martin, 10th Cir. (2000)Scribd Government DocsNessuna valutazione finora
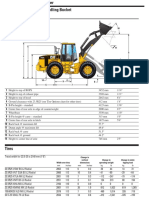
- Cat It62hDocumento4 pagineCat It62hMarceloNessuna valutazione finora
- Variable Length Subnet MasksDocumento4 pagineVariable Length Subnet MaskszelalemNessuna valutazione finora
- 3-Matic 14 - User Manual 15Documento169 pagine3-Matic 14 - User Manual 15Oliver RuizNessuna valutazione finora
- What Is SAP PS (Project Systems) ModuleDocumento3 pagineWhat Is SAP PS (Project Systems) ModuleahmerNessuna valutazione finora
- Digirig Mobile 1 - 9 SchematicDocumento1 paginaDigirig Mobile 1 - 9 SchematicKiki SolihinNessuna valutazione finora
- TP913Documento5 pagineTP913jmpateiro1985Nessuna valutazione finora
- Preventive Maintenance Checklist: Tool Room & Production SawsDocumento2 paginePreventive Maintenance Checklist: Tool Room & Production SawsValerio Ambrocio IsmaelNessuna valutazione finora
- Vehicle Detection and Identification Using YOLO in Image ProcessingDocumento6 pagineVehicle Detection and Identification Using YOLO in Image ProcessingIJRASETPublicationsNessuna valutazione finora
- RVT Liquid DistributorDocumento5 pagineRVT Liquid DistributorimeagorNessuna valutazione finora