Potrebbero piacerti anche
- Is There A Quantum Limit On Speed of Computation?Documento4 pagineIs There A Quantum Limit On Speed of Computation?Croco AliNessuna valutazione finora
- The Effect of Dipole-Dipole Interaction On Tripartite Entanglement in Different CavitiesDocumento15 pagineThe Effect of Dipole-Dipole Interaction On Tripartite Entanglement in Different CavitiesCroco AliNessuna valutazione finora
- A Modified Gravity Theory: Null Aether: Metin G Urses and C Etin S Ent UrkDocumento24 pagineA Modified Gravity Theory: Null Aether: Metin G Urses and C Etin S Ent UrkCroco AliNessuna valutazione finora
- Observation of Mollow Triplets With Tunable Interactions in Double Lambda Systems of Individual Hole SpinsDocumento6 pagineObservation of Mollow Triplets With Tunable Interactions in Double Lambda Systems of Individual Hole SpinsCroco AliNessuna valutazione finora
- A Duality Principle For The Entanglement Entropy of Free Fermion SystemsDocumento12 pagineA Duality Principle For The Entanglement Entropy of Free Fermion SystemsCroco AliNessuna valutazione finora
- Decoherence Effects On Multiplayer Cooperative Quantum GamesDocumento18 pagineDecoherence Effects On Multiplayer Cooperative Quantum GamesCroco AliNessuna valutazione finora
- Fidelity Based Measurement Induced Nonlocality: PACS Numbers: 03.65.ud, 03.65.ta, 03.67.MnDocumento6 pagineFidelity Based Measurement Induced Nonlocality: PACS Numbers: 03.65.ud, 03.65.ta, 03.67.MnCroco AliNessuna valutazione finora
- Static and Spherically Symmetric Solutions in A Scenario With Quadratic Curvature ContributionDocumento16 pagineStatic and Spherically Symmetric Solutions in A Scenario With Quadratic Curvature ContributionCroco Ali0% (1)
- Control and Enhancement of Interferometric Coupling Between Two Photonic QubitsDocumento11 pagineControl and Enhancement of Interferometric Coupling Between Two Photonic QubitsCroco AliNessuna valutazione finora
- Weyl Metrics and Wormholes: Gary W. Gibbons, Mikhail S. VolkovDocumento38 pagineWeyl Metrics and Wormholes: Gary W. Gibbons, Mikhail S. VolkovCroco AliNessuna valutazione finora
- Higher-Spin Charges in Hamiltonian Form II. Fermi Fields: A A B ADocumento42 pagineHigher-Spin Charges in Hamiltonian Form II. Fermi Fields: A A B ACroco AliNessuna valutazione finora
- Dain's Invariant On Non-Time Symmetric Initial Data Sets: J.A. Valiente Kroon and J.L. WilliamsDocumento16 pagineDain's Invariant On Non-Time Symmetric Initial Data Sets: J.A. Valiente Kroon and J.L. WilliamsCroco AliNessuna valutazione finora
- Quantum Transitions Through Cosmological SingularitiesDocumento32 pagineQuantum Transitions Through Cosmological SingularitiesCroco AliNessuna valutazione finora
- Relativistic Magnetic Reconnection in Kerr SpacetimeDocumento6 pagineRelativistic Magnetic Reconnection in Kerr SpacetimeCroco AliNessuna valutazione finora
- The Rigorous Derivation of The Linear Landau Equation From A Particle System in A Weak-Coupling LimitDocumento66 pagineThe Rigorous Derivation of The Linear Landau Equation From A Particle System in A Weak-Coupling LimitCroco AliNessuna valutazione finora
- Ads Poisson Homogeneous Spaces and Drinfel'D DoublesDocumento23 pagineAds Poisson Homogeneous Spaces and Drinfel'D DoublesCroco AliNessuna valutazione finora
- Perturbative Yang-Mills Ground State in The Temporal GaugeDocumento7 paginePerturbative Yang-Mills Ground State in The Temporal GaugeCroco AliNessuna valutazione finora
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Operations of FractionsDocumento2 pagineOperations of FractionsMl PhilNessuna valutazione finora
- (2017) (M Congedo) Riemannian Geometry For EEG-based Brain-Computer Interfaces. A Primer and A ReviewDocumento43 pagine(2017) (M Congedo) Riemannian Geometry For EEG-based Brain-Computer Interfaces. A Primer and A ReviewLucas CustodioNessuna valutazione finora
- CE206 MATLAB FundamentalsDocumento43 pagineCE206 MATLAB FundamentalssjrokzNessuna valutazione finora
- Detailed Lesson Plan in MathematicsDocumento10 pagineDetailed Lesson Plan in MathematicsMelody MegrinioNessuna valutazione finora
- Inverse and Also Relations Questions PDFDocumento3 pagineInverse and Also Relations Questions PDFLiu FaYingNessuna valutazione finora
- Grade 7 Essential Lessons For 2020-2021-ONDocumento6 pagineGrade 7 Essential Lessons For 2020-2021-ONMatt LamNessuna valutazione finora
- CH1 Class 8 Foundation Cbse PDFDocumento16 pagineCH1 Class 8 Foundation Cbse PDFTechnical AkshayNessuna valutazione finora
- Applied Business Statistics, 7 Ed. by Ken BlackDocumento35 pagineApplied Business Statistics, 7 Ed. by Ken BlackhasanNessuna valutazione finora
- Curve and CoordinatesDocumento8 pagineCurve and CoordinatesWassan IdreesNessuna valutazione finora
- Grobler AJ Chapter4Documento14 pagineGrobler AJ Chapter4hieuhuech1Nessuna valutazione finora
- 01 - Playing With NumbersDocumento20 pagine01 - Playing With Numbersajay3518Nessuna valutazione finora
- CH 16 Markov AnalysisDocumento37 pagineCH 16 Markov AnalysisRia Rahma PuspitaNessuna valutazione finora
- SE1 SolutionsDocumento16 pagineSE1 SolutionsDiana SankarNessuna valutazione finora
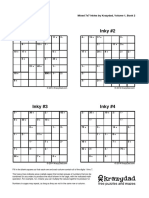
- Inky #1 Inky #2: Mixed 7x7 Inkies by Krazydad, Volume 1, Book 2Documento3 pagineInky #1 Inky #2: Mixed 7x7 Inkies by Krazydad, Volume 1, Book 2AparNessuna valutazione finora
- Must Solve 100 Programs Part 5 - 10Documento11 pagineMust Solve 100 Programs Part 5 - 10Poojith Kodavaluru100% (1)
- DLP Lesson 1Documento1 paginaDLP Lesson 1Jennifer MagangoNessuna valutazione finora
- 2780 - Ajoy SarkerDocumento22 pagine2780 - Ajoy SarkerAjoy sarkerNessuna valutazione finora
- MSC MathematicsDocumento32 pagineMSC MathematicsAarthi Rajakumar100% (1)
- Mathematics: Factors of PolynomialsDocumento19 pagineMathematics: Factors of PolynomialsPaolo AimanNessuna valutazione finora
- C Programming ProblemsDocumento61 pagineC Programming ProblemsRajdeep BharatiNessuna valutazione finora
- 4 ExercisesDocumento64 pagine4 ExercisesDk HardianaNessuna valutazione finora
- Parallel Prefix ComputationDocumento8 pagineParallel Prefix Computationharicharan87Nessuna valutazione finora
- A Review of The Wood and Armer Equations For Torsion in Bridge SlabsDocumento10 pagineA Review of The Wood and Armer Equations For Torsion in Bridge SlabsManvendra NigamNessuna valutazione finora
- Cbse X Sa2 Maths WorkbookDocumento21 pagineCbse X Sa2 Maths Workbookkaushik247Nessuna valutazione finora
- Mitchell and CubeyDocumento146 pagineMitchell and CubeyleslynNZ100% (1)
- Topic:: PercentageDocumento22 pagineTopic:: PercentageS YESHWANTH GururajNessuna valutazione finora
- Week 4 SLM PreCalculus On HyperbolaDocumento12 pagineWeek 4 SLM PreCalculus On HyperbolaCris jemel SumandoNessuna valutazione finora
- MCV4U Derivatives of Exponential and Logarithmic Functions Practice TestDocumento6 pagineMCV4U Derivatives of Exponential and Logarithmic Functions Practice TestEmily ChenNessuna valutazione finora
- Planar NonPlanar GraphsDocumento23 paginePlanar NonPlanar GraphsRozygynaga Xavierra LumminaNessuna valutazione finora
- Wardova Metoda Od WardaDocumento10 pagineWardova Metoda Od WardaStarý DonorNessuna valutazione finora