Potrebbero piacerti anche
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Da EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Nessuna valutazione finora
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Da EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Valutazione: 2.5 su 5 stelle2.5/5 (3)
- Audio IC Projects: A Collection of Useful Circuits Based on Readily Available ChipsDa EverandAudio IC Projects: A Collection of Useful Circuits Based on Readily Available ChipsNessuna valutazione finora
- Operational Amplifier Circuits: Analysis and DesignDa EverandOperational Amplifier Circuits: Analysis and DesignValutazione: 4.5 su 5 stelle4.5/5 (2)
- 110 Waveform Generator Projects for the Home ConstructorDa Everand110 Waveform Generator Projects for the Home ConstructorValutazione: 4 su 5 stelle4/5 (1)
- Exercises in Electronics: Operational Amplifier CircuitsDa EverandExercises in Electronics: Operational Amplifier CircuitsValutazione: 3 su 5 stelle3/5 (1)
- Fundamentals of Electronics 1: Electronic Components and Elementary FunctionsDa EverandFundamentals of Electronics 1: Electronic Components and Elementary FunctionsNessuna valutazione finora
- UR Series Relay Test ReportDocumento4 pagineUR Series Relay Test ReportRagab TolbaNessuna valutazione finora
- Analog Circuit Design Volume 2: Immersion in the Black Art of Analog DesignDa EverandAnalog Circuit Design Volume 2: Immersion in the Black Art of Analog DesignNessuna valutazione finora
- Semiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsDa EverandSemiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsNessuna valutazione finora
- Fundamentals of Electronics 2: Continuous-time Signals and SystemsDa EverandFundamentals of Electronics 2: Continuous-time Signals and SystemsNessuna valutazione finora
- Aconis 2000 Pms PDFDocumento53 pagineAconis 2000 Pms PDFtralala78% (9)
- Digital Signal Processing Using the ARM Cortex M4Da EverandDigital Signal Processing Using the ARM Cortex M4Valutazione: 1 su 5 stelle1/5 (1)
- Auramo Oy spare parts listsDocumento12 pagineAuramo Oy spare parts listsYavuz ErcanliNessuna valutazione finora
- Rudraksha - Scientific FactsDocumento20 pagineRudraksha - Scientific FactsAkash Agarwal100% (3)
- General JournalDocumento11 pagineGeneral JournalZaheer Ahmed Swati100% (2)
- Zygomatic Complex FracturesDocumento128 pagineZygomatic Complex FracturesTarun KashyapNessuna valutazione finora
- Switzerland: Food and CultureDocumento18 pagineSwitzerland: Food and CultureAaron CoutinhoNessuna valutazione finora
- FS1570 FS2570 Installation ManualDocumento76 pagineFS1570 FS2570 Installation ManualNguyen Phuoc HoNessuna valutazione finora
- Manual de Referencia PlanmecaDocumento288 pagineManual de Referencia PlanmecaJorge Escalona Hernandez100% (2)
- NCMA 217 - Newborn Assessment Ma'am JhalDocumento5 pagineNCMA 217 - Newborn Assessment Ma'am JhalMariah Blez BognotNessuna valutazione finora
- Newnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1Da EverandNewnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1Valutazione: 4.5 su 5 stelle4.5/5 (3)
- ACONIS-2000 User's Manual GuideDocumento314 pagineACONIS-2000 User's Manual GuideAdrian Vasilache83% (6)
- Discrete Wavelet Transform: A Signal Processing ApproachDa EverandDiscrete Wavelet Transform: A Signal Processing ApproachValutazione: 5 su 5 stelle5/5 (2)
- Bentel J408Documento64 pagineBentel J408Bojan MarkovicNessuna valutazione finora
- GP1A70R/GP1A71R: OPIC Photointerrupter With Encoder FunctionsDocumento6 pagineGP1A70R/GP1A71R: OPIC Photointerrupter With Encoder FunctionsToai NguyenNessuna valutazione finora
- GP1A30R: OPIC Photointerrupter With Encoder FunctionDocumento4 pagineGP1A30R: OPIC Photointerrupter With Encoder FunctionnospherathusNessuna valutazione finora
- Features Description: FM IF SystemDocumento7 pagineFeatures Description: FM IF Systemlu1agpNessuna valutazione finora
- PNP General Purpose Amplifier: Absolute Maximum RatingsDocumento10 paginePNP General Purpose Amplifier: Absolute Maximum Ratingsmike_helplineNessuna valutazione finora
- 3 Video Ampop - Tda6107qDocumento16 pagine3 Video Ampop - Tda6107qAnderson LuizNessuna valutazione finora
- DENON AVR 1802 882 Service Manual PDFDocumento94 pagineDENON AVR 1802 882 Service Manual PDFatvstereo50% (4)
- Integrado An5829sDocumento20 pagineIntegrado An5829sangelr203619219Nessuna valutazione finora
- TDA6107QDocumento16 pagineTDA6107QjosetantonioNessuna valutazione finora
- Datasheet AN5829S - Sound Multiplex Decoder IC For The U.S. Televisions - Panasonic SemiconductorDocumento17 pagineDatasheet AN5829S - Sound Multiplex Decoder IC For The U.S. Televisions - Panasonic Semiconductorfernandog251186Nessuna valutazione finora
- 2N3906Documento17 pagine2N3906Mauricio Parada ZuñigaNessuna valutazione finora
- XR 8038aDocumento16 pagineXR 8038akeyboard2014Nessuna valutazione finora
- An5165 JunglaDocumento24 pagineAn5165 JunglaArturo NavaNessuna valutazione finora
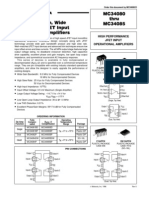
- LM359 Dual, High Speed, Programmable, Current Mode (Norton) AmplifiersDocumento24 pagineLM359 Dual, High Speed, Programmable, Current Mode (Norton) Amplifierswilliamjamir2295Nessuna valutazione finora
- Nad T773-SMDocumento78 pagineNad T773-SMPietertje58Nessuna valutazione finora
- 2068DD Desym Amp DatasheetDocumento6 pagine2068DD Desym Amp Datasheetastuck1Nessuna valutazione finora
- IRG4BC30K-S: Features Features Features Features FeaturesDocumento8 pagineIRG4BC30K-S: Features Features Features Features FeaturesRafael MonzonNessuna valutazione finora
- Datasheet JFETDocumento16 pagineDatasheet JFETaldontetNessuna valutazione finora
- TLO74CNDocumento12 pagineTLO74CNEverson CorreaNessuna valutazione finora
- MMBT918 PN918: NPN RF TransistorDocumento15 pagineMMBT918 PN918: NPN RF TransistorGefry Andres Castro JimenezNessuna valutazione finora
- LT1167 Instr AmpDocumento20 pagineLT1167 Instr Ampagmnm1962Nessuna valutazione finora
- Ta 8252 HDocumento14 pagineTa 8252 HNiraj Suroopjeet0% (1)
- TDA1576Documento16 pagineTDA1576cgmannerheimNessuna valutazione finora
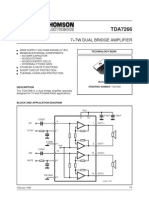
- Tda 7266Documento9 pagineTda 7266huitlamenNessuna valutazione finora
- CA3189EDocumento8 pagineCA3189EelektrovodaNessuna valutazione finora
- Tda 7266Documento9 pagineTda 7266hawarnetNessuna valutazione finora
- Tda 7266Documento9 pagineTda 7266Miloud ChouguiNessuna valutazione finora
- SANYO Semiconductor LA76814 Single-Chip VIF/SIF/Y/C/Deflection ICDocumento35 pagineSANYO Semiconductor LA76814 Single-Chip VIF/SIF/Y/C/Deflection ICLeonel MartinezNessuna valutazione finora
- Datasheet 741Documento5 pagineDatasheet 741Lucas Ernesto Caetano ErnestoNessuna valutazione finora
- TDA7269ADocumento7 pagineTDA7269ACojocar FlorinNessuna valutazione finora
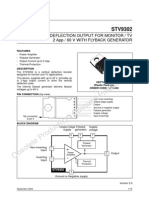
- STV 9302Documento15 pagineSTV 9302krish8717Nessuna valutazione finora
- Max Power 43 W BTL × 4 CH Audio Power IC: FeaturesDocumento12 pagineMax Power 43 W BTL × 4 CH Audio Power IC: FeaturesMiloud ChouguiNessuna valutazione finora
- Pc817 DatasheetDocumento5 paginePc817 DatasheetprincebahariNessuna valutazione finora
- INA128p Datasheet PDFDocumento10 pagineINA128p Datasheet PDFsachinktniceNessuna valutazione finora
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsDa EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsNessuna valutazione finora
- Hyrdoacoustic Ocean Exploration: Theories and Experimental ApplicationDa EverandHyrdoacoustic Ocean Exploration: Theories and Experimental ApplicationNessuna valutazione finora
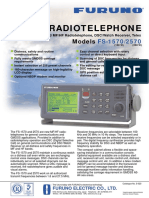
- Fa - 100Documento78 pagineFa - 100djoko susantoNessuna valutazione finora
- Fa-100 Faispc OmeDocumento43 pagineFa-100 Faispc OmeNguyen Phuoc HoNessuna valutazione finora
- Fax-30 Facsimile Receiver (Ev)Documento1 paginaFax-30 Facsimile Receiver (Ev)Nguyen Phuoc HoNessuna valutazione finora
- Fix: C1 Higher Voltage: CJ78M05-to252 U1 L1 R1 D1Documento1 paginaFix: C1 Higher Voltage: CJ78M05-to252 U1 L1 R1 D1moma52100% (1)
- Fax-30 Facsimile Receiver (SP)Documento1 paginaFax-30 Facsimile Receiver (SP)Nguyen Phuoc HoNessuna valutazione finora
- Fax-210 Ome-62490Documento100 pagineFax-210 Ome-62490Nguyen Phuoc HoNessuna valutazione finora
- Fax30 OmDocumento115 pagineFax30 OmLeovard69Nessuna valutazione finora
- Furuno GPS to AIS connections guideDocumento2 pagineFuruno GPS to AIS connections guideNguyen Phuoc HoNessuna valutazione finora
- FA100 Operator's Manual K4 9-7-05Documento80 pagineFA100 Operator's Manual K4 9-7-05Kayhan IraniNessuna valutazione finora
- Furuno FA-100 Brief Installation GuideDocumento5 pagineFuruno FA-100 Brief Installation GuideNguyen Phuoc HoNessuna valutazione finora
- Navigat Manual 056341 PDFDocumento98 pagineNavigat Manual 056341 PDFCaraluaNessuna valutazione finora
- Uais Transponder Fa-100 Operator's Guide: Turning On and OffDocumento2 pagineUais Transponder Fa-100 Operator's Guide: Turning On and OffNguyen Phuoc HoNessuna valutazione finora
- Beginner's Arduino Multi-Function Shield Guide and Code ExamplesDocumento6 pagineBeginner's Arduino Multi-Function Shield Guide and Code ExamplesNguyen Phuoc HoNessuna valutazione finora
- DTA191012Documento2 pagineDTA191012Nguyen Phuoc HoNessuna valutazione finora
- H20R120R3Documento15 pagineH20R120R3Nguyen Phuoc HoNessuna valutazione finora
- Nmea Amplifier-Distributor MDU-102: Operating ManualDocumento27 pagineNmea Amplifier-Distributor MDU-102: Operating ManualNguyen Phuoc HoNessuna valutazione finora
- FGA25N120ANTD/FGA25N120ANTD - F109: 1200V NPT Trench IGBTDocumento9 pagineFGA25N120ANTD/FGA25N120ANTD - F109: 1200V NPT Trench IGBTNguyen Phuoc HoNessuna valutazione finora
- Arduino 4-Digit 0.5" 7 Segment Display Module: Arduino Compatible Hardware ContainsDocumento4 pagineArduino 4-Digit 0.5" 7 Segment Display Module: Arduino Compatible Hardware ContainsNguyen Phuoc HoNessuna valutazione finora
- FM-2510 OseDocumento2 pagineFM-2510 OseNguyen Phuoc HoNessuna valutazione finora
- SC56-21SRWA: 14.22 MM (0.56 Inch) Single Digit Numeric DisplayDocumento4 pagineSC56-21SRWA: 14.22 MM (0.56 Inch) Single Digit Numeric DisplayNguyen Phuoc HoNessuna valutazione finora
- Installation Manuals,-S-,fs1570 fs2570 Installation Manual PDFDocumento82 pagineInstallation Manuals,-S-,fs1570 fs2570 Installation Manual PDFMahfooz AliNessuna valutazione finora
- dsc60 Operators Manual PDFDocumento151 paginedsc60 Operators Manual PDFPK SelvanNessuna valutazione finora
- B.6.9 NKE-1130 (AC220V) : JMA-9100 Instruction Manual B.Drawings B.6 Interconnection Diagram of Scanner UnitDocumento1 paginaB.6.9 NKE-1130 (AC220V) : JMA-9100 Instruction Manual B.Drawings B.6 Interconnection Diagram of Scanner UnitNguyen Phuoc HoNessuna valutazione finora
- dsc60 Operators Manual PDFDocumento151 paginedsc60 Operators Manual PDFPK SelvanNessuna valutazione finora
- FS1570 FS2570 Operator's Manual F 5-25-07Documento226 pagineFS1570 FS2570 Operator's Manual F 5-25-07Nguyen Phuoc HoNessuna valutazione finora
- Brochure PDFDocumento2 pagineBrochure PDFJay SanchaniyaNessuna valutazione finora
- JMA-7100 Series ARPA RadarDocumento8 pagineJMA-7100 Series ARPA RadarNguyen Phuoc HoNessuna valutazione finora
- Esaote MyLabX7Documento12 pagineEsaote MyLabX7Neo BiosNessuna valutazione finora
- Nitric OxideDocumento20 pagineNitric OxideGanesh V GaonkarNessuna valutazione finora
- How To Become A Coffee Aficionado: Tips & Tricks: Kate Macdonnell Brewing Updated: Feb 06 2023Documento17 pagineHow To Become A Coffee Aficionado: Tips & Tricks: Kate Macdonnell Brewing Updated: Feb 06 2023sadenaikeNessuna valutazione finora
- Hydrogeological Characterization of Karst Areas in NW VietnamDocumento152 pagineHydrogeological Characterization of Karst Areas in NW VietnamCae Martins100% (1)
- December - Cost of Goods Sold (Journal)Documento14 pagineDecember - Cost of Goods Sold (Journal)kuro hanabusaNessuna valutazione finora
- Bio-Tank Guidelines for Indian RailwayDocumento51 pagineBio-Tank Guidelines for Indian Railwayravi100% (2)
- G10 Bio CellsDocumento6 pagineG10 Bio CellsswacaneNessuna valutazione finora
- Schneider Electric PowerPact H-, J-, and L-Frame Circuit Breakers PDFDocumento3 pagineSchneider Electric PowerPact H-, J-, and L-Frame Circuit Breakers PDFAnonymous dH3DIEtzNessuna valutazione finora
- Annex 8 Qualification of BalancesDocumento11 pagineAnnex 8 Qualification of BalancesMassimiliano PorcelliNessuna valutazione finora
- LAST CARGOES AND CLEANINGDocumento1 paginaLAST CARGOES AND CLEANINGAung Htet KyawNessuna valutazione finora
- To The OneDocumento8 pagineTo The OnePizzaCowNessuna valutazione finora
- Sarthak WorksheetDocumento15 pagineSarthak Worksheetcyber forensicNessuna valutazione finora
- Pack Alimentacion Clin in Perin 14Documento194 paginePack Alimentacion Clin in Perin 14Paz BustosNessuna valutazione finora
- 57882d4608ae21394a0c7b00 PDFDocumento574 pagine57882d4608ae21394a0c7b00 PDFtualaNessuna valutazione finora
- BOF, LF & CasterDocumento14 pagineBOF, LF & CastermaklesurrahmanNessuna valutazione finora
- Solcon Catalog WebDocumento12 pagineSolcon Catalog Webquocviet612Nessuna valutazione finora
- Moral Character ViolationsDocumento2 pagineMoral Character ViolationsAnne SchindlerNessuna valutazione finora
- OC - PlumberDocumento6 pagineOC - Plumbertakuva03Nessuna valutazione finora
- Sub Erna RekhaDocumento2 pagineSub Erna Rekhasurabhi mandalNessuna valutazione finora
- AZ ATTR Concept Test Clean SCREENERDocumento9 pagineAZ ATTR Concept Test Clean SCREENEREdwin BennyNessuna valutazione finora
- Merit of RatingDocumento1 paginaMerit of RatingRaidasNessuna valutazione finora
- Heat Exchanger Sodium SilicateDocumento2 pagineHeat Exchanger Sodium SilicateChristopher BrownNessuna valutazione finora