Potrebbero piacerti anche
- CNC Usb Controlle Mdk2-9axisDocumento36 pagineCNC Usb Controlle Mdk2-9axisCipriano M RogerioNessuna valutazione finora
- CNC Usb ControllerDocumento153 pagineCNC Usb ControllerValentin Banica0% (1)
- Styro Cut INSTRUCTIONSDocumento6 pagineStyro Cut INSTRUCTIONSMatteo PoliNessuna valutazione finora
- Ruger MkI ReceiverDocumento1 paginaRuger MkI Receiverspartan45Nessuna valutazione finora
- Motor of VTOL Aircraft PDFDocumento22 pagineMotor of VTOL Aircraft PDFvimarsh joshiNessuna valutazione finora
- SFAStirling Engine TemplatesDocumento4 pagineSFAStirling Engine TemplatesEl GroneNessuna valutazione finora
- Investigation of Airfoil Profile Design Using Reverse Engineering Bezier CurveDocumento10 pagineInvestigation of Airfoil Profile Design Using Reverse Engineering Bezier CurveBala MuruganNessuna valutazione finora
- KayakDocumento3 pagineKayaklymantabNessuna valutazione finora
- CNC Usb Controller MK 3Documento20 pagineCNC Usb Controller MK 3Antonio Jiménez100% (1)
- Nozzle Design Optimization To Reduce Noice For Turbo Jet EngineDocumento16 pagineNozzle Design Optimization To Reduce Noice For Turbo Jet EngineSri Tech EngineeringNessuna valutazione finora
- AK1-3 Helicopter Standard Specification PDFDocumento49 pagineAK1-3 Helicopter Standard Specification PDFEstevam Gomes de AzevedoNessuna valutazione finora
- July 9, 1968 T M. A. Cardoso 3,391,746: Helicopter Control System Filed May 15, 1967 3 Sheets-Sheet 1Documento7 pagineJuly 9, 1968 T M. A. Cardoso 3,391,746: Helicopter Control System Filed May 15, 1967 3 Sheets-Sheet 1rte678Nessuna valutazione finora
- Flatback Airfoil Wind Tunnel ExperimentDocumento37 pagineFlatback Airfoil Wind Tunnel Experimentvictoria100% (1)
- Owner's Manual: Generator EM500 EM600Documento37 pagineOwner's Manual: Generator EM500 EM600mariopilarNessuna valutazione finora
- Max JonDocumento2 pagineMax Jontwinscrewcanoe100% (1)
- Build A Homebrew Radio Telescope-QST-0609 PDFDocumento5 pagineBuild A Homebrew Radio Telescope-QST-0609 PDFMichelepioNessuna valutazione finora
- Bensen b8 PDFDocumento8 pagineBensen b8 PDFmaxNessuna valutazione finora
- Generator Bushing DesignsDocumento10 pagineGenerator Bushing DesignsPradeep_VashistNessuna valutazione finora
- Poh Sd-1 TG Se-33Documento19 paginePoh Sd-1 TG Se-33Łukasz50% (2)
- Dleg0170 Manual PDFDocumento20 pagineDleg0170 Manual PDFEmmanuel Lucas TrobbianiNessuna valutazione finora
- CNC Plasma Torch ConstructionDocumento2 pagineCNC Plasma Torch ConstructionMariane MottaNessuna valutazione finora
- 4 Axis 500KHz Linkage Offline Motion Controller System PLC Control G Code+100 Pulse Handwheel MPG With Emergency Stop For CNC Router Engraving Milling Lathe Machine RMHV3.1Documento11 pagine4 Axis 500KHz Linkage Offline Motion Controller System PLC Control G Code+100 Pulse Handwheel MPG With Emergency Stop For CNC Router Engraving Milling Lathe Machine RMHV3.1jonNessuna valutazione finora
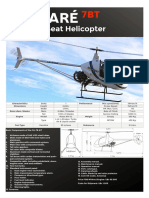
- CICARÉ 12 - Technical CaracteristicsDocumento2 pagineCICARÉ 12 - Technical CaracteristicsEstevam Gomes de AzevedoNessuna valutazione finora
- Helicopter Flight ControlsDocumento6 pagineHelicopter Flight Controlssamik4uNessuna valutazione finora
- Radiant Solar Dryer Construction For The Visually-Minded, by Bob DahseDocumento9 pagineRadiant Solar Dryer Construction For The Visually-Minded, by Bob DahseLusos FructusNessuna valutazione finora
- Bobine D'allumage TondeuseDocumento15 pagineBobine D'allumage TondeuseThierry AvikianNessuna valutazione finora
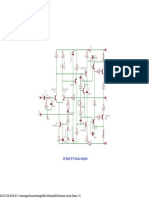
- BG2 Miniamp V3 Schematic PDFDocumento1 paginaBG2 Miniamp V3 Schematic PDFJacob Setti100% (1)
- Rotor System-Razon, ManugasDocumento14 pagineRotor System-Razon, ManugasGilbert MendozaNessuna valutazione finora
- NASA SMRC TechnologiesDocumento170 pagineNASA SMRC TechnologiesNurain OkeNessuna valutazione finora
- Pinfire Shotguns Explained PDFDocumento15 paginePinfire Shotguns Explained PDFLupus TeiasNessuna valutazione finora
- PluginTutorial V01Documento92 paginePluginTutorial V01Vincenzo PaternòNessuna valutazione finora
- Ops-Core Dh-132 HelmetDocumento4 pagineOps-Core Dh-132 HelmetDenbe SantosNessuna valutazione finora
- Dual Ignition PDFDocumento3 pagineDual Ignition PDFSiddharth SharmaNessuna valutazione finora
- Theoretical and Experimental Evaluation of Pulse Jet EngineDocumento59 pagineTheoretical and Experimental Evaluation of Pulse Jet EngineJonas KnollNessuna valutazione finora
- Instructions For Making The Inflatable KiteDocumento15 pagineInstructions For Making The Inflatable KiteLuka NikitovicNessuna valutazione finora
- Brochure Cavalon ENG PDFDocumento20 pagineBrochure Cavalon ENG PDFfjfluzNessuna valutazione finora
- AIAA 2005-2349 Blended-Wing-Body (BWB) Fuselage Structural Design For Weight ReductionDocumento9 pagineAIAA 2005-2349 Blended-Wing-Body (BWB) Fuselage Structural Design For Weight ReductionM. Sadiq. A. PachapuriNessuna valutazione finora
- (Boat-Building) Bait Boat Plans 06Documento1 pagina(Boat-Building) Bait Boat Plans 06inekefrank1Nessuna valutazione finora
- Idoc - Pub Welding-TransformerDocumento38 pagineIdoc - Pub Welding-TransformermhsalihNessuna valutazione finora
- Gs 3 MDocumento316 pagineGs 3 MNazielNessuna valutazione finora
- Carbine Receiver ExtensionsDocumento2 pagineCarbine Receiver Extensionsjordanbowles2579Nessuna valutazione finora
- X 14Documento17 pagineX 14BerniSomex SomexemosNessuna valutazione finora
- Simple Free Energie Device Module Booster ElectrolyseDocumento29 pagineSimple Free Energie Device Module Booster ElectrolyseLudovicNessuna valutazione finora
- Mtosport Maintenance PDFDocumento191 pagineMtosport Maintenance PDFBen FriskneyNessuna valutazione finora
- Patented May 28, 1912.: Air 4. - GentsDocumento12 paginePatented May 28, 1912.: Air 4. - GentsСлэйтер Строительная компанияNessuna valutazione finora
- Biesse Rover Gold 1232 - 2013 - enDocumento9 pagineBiesse Rover Gold 1232 - 2013 - enetors11Nessuna valutazione finora
- 3 PhaseDocumento9 pagine3 PhaseArnulfo LavaresNessuna valutazione finora
- Parts Breakdown HP2070: Page 1 of 3 2/8/2008Documento3 pagineParts Breakdown HP2070: Page 1 of 3 2/8/2008Zaidu zamaan100% (1)
- Sharp Lc-32d47 Sb27 c3237 SM LCDDocumento128 pagineSharp Lc-32d47 Sb27 c3237 SM LCDRoosevelt Vega SanchezNessuna valutazione finora
- Filament Wound Fuselage With Cocured StiffenersDocumento12 pagineFilament Wound Fuselage With Cocured Stiffenersmecheng88Nessuna valutazione finora
- Hot Wire Manchine - User Manual-ENDocumento41 pagineHot Wire Manchine - User Manual-ENZoliNessuna valutazione finora
- d882p PDFDocumento3 pagined882p PDFdiego rotpeNessuna valutazione finora
- Type of Rotor SystemDocumento6 pagineType of Rotor SystemAhmadFaisalNessuna valutazione finora
- Lift and Drag Curves For The WingDocumento3 pagineLift and Drag Curves For The WingAlex100% (1)
- Design Ideas for Drones, Multicopters and QuadcoptersDa EverandDesign Ideas for Drones, Multicopters and QuadcoptersNessuna valutazione finora
- Frekventni RegulatoriDocumento6 pagineFrekventni RegulatoriGogyNessuna valutazione finora
- Description Power Range: Analog Servo DriveDocumento7 pagineDescription Power Range: Analog Servo DriveElectromateNessuna valutazione finora
- Description Power Range: Analog Servo DriveDocumento7 pagineDescription Power Range: Analog Servo DriveElectromateNessuna valutazione finora
- Bi and Multiling Academic AttainmentDocumento15 pagineBi and Multiling Academic Attainmentluismena09051982Nessuna valutazione finora
- VMGLiteDatasheet PDFDocumento21 pagineVMGLiteDatasheet PDFluismena09051982Nessuna valutazione finora
- Setup: "Ardudroid 0.12 Alpha by Techbitar (2013) "Documento4 pagineSetup: "Ardudroid 0.12 Alpha by Techbitar (2013) "luismena09051982Nessuna valutazione finora
- Max16805 Max16806Documento18 pagineMax16805 Max16806luismena09051982100% (1)
- The Bluetooth HC5Documento1 paginaThe Bluetooth HC5luismena09051982Nessuna valutazione finora
- Scopus - Advances in Soft ComputingDocumento2 pagineScopus - Advances in Soft Computingluismena09051982Nessuna valutazione finora
- GLCD CallertableDocumento1 paginaGLCD Callertableluismena09051982Nessuna valutazione finora
- Guia Do UsuárioDocumento597 pagineGuia Do UsuárioCarlos PereiraNessuna valutazione finora
- Click To Buy: The 2N4351 Is An Enhancement Mode N-Channel MosfetDocumento1 paginaClick To Buy: The 2N4351 Is An Enhancement Mode N-Channel Mosfetluismena09051982Nessuna valutazione finora
- Display 7 SegmentosDocumento2 pagineDisplay 7 SegmentosSebastian Diaz BarbosaNessuna valutazione finora
- PIC 16f877a Data SheetDocumento234 paginePIC 16f877a Data Sheetanon-26401438% (8)
- GLCD CallertableDocumento1 paginaGLCD Callertableluismena09051982Nessuna valutazione finora
- 2N4351Documento2 pagine2N4351segalignoNessuna valutazione finora
- USB13 CallertableDocumento2 pagineUSB13 Callertableluismena09051982Nessuna valutazione finora
- GLCD CallertableDocumento1 paginaGLCD Callertableluismena09051982Nessuna valutazione finora
- Practica LCD CallertableDocumento1 paginaPractica LCD Callertableluismena09051982Nessuna valutazione finora
- GLCD CallertableDocumento1 paginaGLCD Callertableluismena09051982Nessuna valutazione finora
- COM SERIAL1 CallertableDocumento1 paginaCOM SERIAL1 Callertableluismena09051982Nessuna valutazione finora
- COM SERIAL2 CallertableDocumento1 paginaCOM SERIAL2 Callertableluismena09051982Nessuna valutazione finora
- COM SERIAL CallertableDocumento1 paginaCOM SERIAL Callertableluismena09051982Nessuna valutazione finora
- GLCD GRAFICO 2POT CallertableDocumento1 paginaGLCD GRAFICO 2POT Callertableluismena09051982Nessuna valutazione finora
- GLCD T6963C INIT CallertableDocumento4 pagineGLCD T6963C INIT Callertableluismena09051982Nessuna valutazione finora
- GLCD GRAFICO CallertableDocumento1 paginaGLCD GRAFICO Callertableluismena09051982Nessuna valutazione finora
- Analoga CallertableDocumento1 paginaAnaloga Callertableluismena09051982Nessuna valutazione finora
- TECLADO CallertableDocumento1 paginaTECLADO Callertableluismena09051982Nessuna valutazione finora
- Arduino Led Display (8 X 8 Led Matrix) - GuideDocumento1 paginaArduino Led Display (8 X 8 Led Matrix) - GuideMC. Rene Solis R.100% (2)
- GLCD CallertableDocumento1 paginaGLCD Callertableluismena09051982Nessuna valutazione finora
- Herramienta Educacional para ControlDocumento8 pagineHerramienta Educacional para Controlluismena09051982Nessuna valutazione finora
- Arduino Led Display (8 X 8 Led Matrix) - GuideDocumento1 paginaArduino Led Display (8 X 8 Led Matrix) - GuideMC. Rene Solis R.100% (2)
- Sistema Scada de Bajo Costo para Educacion PDFDocumento7 pagineSistema Scada de Bajo Costo para Educacion PDFluismena09051982Nessuna valutazione finora
- Volcanoes Sub-topic:Volcanic EruptionDocumento16 pagineVolcanoes Sub-topic:Volcanic EruptionVhenz MapiliNessuna valutazione finora
- Hackerearth Online Judge: Prepared By: Mohamed AymanDocumento21 pagineHackerearth Online Judge: Prepared By: Mohamed AymanPawan NaniNessuna valutazione finora
- Solid Waste Management in The World's Cities, UN-HABITAT: January 2010Documento17 pagineSolid Waste Management in The World's Cities, UN-HABITAT: January 2010Rajasri SNessuna valutazione finora
- Ortho TechnologyDocumento196 pagineOrtho Technologyr3doc3Nessuna valutazione finora
- Jy992d66901 CDocumento6 pagineJy992d66901 CMaitry ShahNessuna valutazione finora
- Group Members: - Muhamad Sahli B Muda - Nurul Hana Balqis Baharom - Napsiah Abdul RahmanDocumento18 pagineGroup Members: - Muhamad Sahli B Muda - Nurul Hana Balqis Baharom - Napsiah Abdul RahmanNurul Hana BalqisNessuna valutazione finora
- Materials Management - 1 - Dr. VP - 2017-18Documento33 pagineMaterials Management - 1 - Dr. VP - 2017-18Vrushabh ShelkarNessuna valutazione finora
- Machine Design 2021 Guidelines and MechanicsDocumento2 pagineMachine Design 2021 Guidelines and Mechanicsreneil llegueNessuna valutazione finora
- DOT RequirementsDocumento372 pagineDOT RequirementsMuhammadShabbirNessuna valutazione finora
- DC Generator - Construction, Working Principle, Types, and Applications PDFDocumento1 paginaDC Generator - Construction, Working Principle, Types, and Applications PDFGokul GokulNessuna valutazione finora
- WoundVite®, The #1 Most Comprehensive Wound, Scar and Post-Surgical Repair Formula Receives Amazon's Choice High RatingsDocumento3 pagineWoundVite®, The #1 Most Comprehensive Wound, Scar and Post-Surgical Repair Formula Receives Amazon's Choice High RatingsPR.comNessuna valutazione finora
- Chapter 4 Signal Flow GraphDocumento34 pagineChapter 4 Signal Flow GraphAbhishek PattanaikNessuna valutazione finora
- MATH 304 Linear Algebra Lecture 9 - Subspaces of Vector Spaces (Continued) - Span. Spanning Set PDFDocumento20 pagineMATH 304 Linear Algebra Lecture 9 - Subspaces of Vector Spaces (Continued) - Span. Spanning Set PDFmurugan2284Nessuna valutazione finora
- Present Perfect and Present Perfect ProgressiveDocumento5 paginePresent Perfect and Present Perfect ProgressiveKiara Fajardo matusNessuna valutazione finora
- CBC DrivingDocumento74 pagineCBC DrivingElonah Jean ConstantinoNessuna valutazione finora
- Iso 22301 2019 en PDFDocumento11 pagineIso 22301 2019 en PDFImam Saleh100% (3)
- Adolescents' Gender and Their Social Adjustment The Role of The Counsellor in NigeriaDocumento20 pagineAdolescents' Gender and Their Social Adjustment The Role of The Counsellor in NigeriaEfosaNessuna valutazione finora
- Grua Grove 530e 2 Manual de PartesDocumento713 pagineGrua Grove 530e 2 Manual de PartesGustavo100% (7)
- P D P: C I D, C M: Design of Coastal RoadsDocumento55 pagineP D P: C I D, C M: Design of Coastal RoadsMohammedNessuna valutazione finora
- Oracle SOA Suite Oracle Containers For J2EE Feature Overview OC4JDocumento10 pagineOracle SOA Suite Oracle Containers For J2EE Feature Overview OC4JLuis YañezNessuna valutazione finora
- AIP 2020 FINAL JuneDocumento5 pagineAIP 2020 FINAL JuneVINA ARIETANessuna valutazione finora
- Midterm ReviewerDocumento20 pagineMidterm ReviewerJonnafe IgnacioNessuna valutazione finora
- WCDMA Radio Access OverviewDocumento8 pagineWCDMA Radio Access OverviewDocMasterNessuna valutazione finora
- Bassoon (FAGOT) : See AlsoDocumento36 pagineBassoon (FAGOT) : See Alsocarlos tarancón0% (1)
- Sustainable Strategic Management BarbosaDocumento11 pagineSustainable Strategic Management BarbosapurwawardhaniNessuna valutazione finora
- QAI Golden Pass Fact SheetDocumento2 pagineQAI Golden Pass Fact SheetQatar-America InstituteNessuna valutazione finora
- The Perception of Luxury Cars MA Thesis 25 03Documento60 pagineThe Perception of Luxury Cars MA Thesis 25 03Quaxi1954Nessuna valutazione finora
- Unit-5 Harmonics & FiltersDocumento25 pagineUnit-5 Harmonics & FiltersBhanu100% (1)
- Bhavesh ProjectDocumento14 pagineBhavesh ProjectRahul LimbaniNessuna valutazione finora
- Performance Task 2Documento3 paginePerformance Task 2Edrose WycocoNessuna valutazione finora