Potrebbero piacerti anche
- Teste avalia leitura 1o-2o ciclosDocumento25 pagineTeste avalia leitura 1o-2o ciclosPaula Maciel100% (5)
- A teoria dos números naturais segundo Peano e DedekindDocumento332 pagineA teoria dos números naturais segundo Peano e DedekindMario Aguirre100% (2)
- Tecnicas de Operacao 915 CDocumento37 pagineTecnicas de Operacao 915 CRonald Alexs Lopez Aguilar100% (2)
- Atividade 1 e 2 Estagio Superv PDFDocumento9 pagineAtividade 1 e 2 Estagio Superv PDFAnthonny Gabryell LimaNessuna valutazione finora
- Artigo de Enfermagem Referente A Consumo de Bebidas Alcoolicas PDFDocumento13 pagineArtigo de Enfermagem Referente A Consumo de Bebidas Alcoolicas PDFAnthonny Gabryell LimaNessuna valutazione finora
- Teoria dos Grupos: Introdução aos Conceitos BásicosDocumento38 pagineTeoria dos Grupos: Introdução aos Conceitos BásicosAnthonny Gabryell LimaNessuna valutazione finora
- Exercícios Do Livro Elementos de Álgebra - Página 261Documento6 pagineExercícios Do Livro Elementos de Álgebra - Página 261MoisesToledo100% (2)
- Geometria Diferencial PDFDocumento157 pagineGeometria Diferencial PDFBryan AndradeNessuna valutazione finora
- Sueli Menezes Pereira - Politicas Educacionais No Contexto de Estado NeoliberalDocumento13 pagineSueli Menezes Pereira - Politicas Educacionais No Contexto de Estado NeoliberaljonathanDXDNessuna valutazione finora
- Arqu 3 PDFDocumento15 pagineArqu 3 PDFAnthonny Gabryell LimaNessuna valutazione finora
- Artigo de Enfermagem Referente A Consumo de Bebidas Alcoolicas PDFDocumento13 pagineArtigo de Enfermagem Referente A Consumo de Bebidas Alcoolicas PDFAnthonny Gabryell LimaNessuna valutazione finora
- Sotomayor - Equaçoes Diferenciais Ordinárias PDFDocumento171 pagineSotomayor - Equaçoes Diferenciais Ordinárias PDFDaniel PiresNessuna valutazione finora
- Grupos Mod2Documento53 pagineGrupos Mod2José SantosNessuna valutazione finora
- 220 469 1 SM PDFDocumento12 pagine220 469 1 SM PDFAnthonny Gabryell LimaNessuna valutazione finora
- Exercicios 7 8 9 PDFDocumento3 pagineExercicios 7 8 9 PDFJessé AraújoNessuna valutazione finora
- Exercicio 4 Uma Prova Alternativa PDFDocumento1 paginaExercicio 4 Uma Prova Alternativa PDFAnthonny Gabryell LimaNessuna valutazione finora
- Exercícios Do Livro Elementos de Álgebra - Página 261Documento6 pagineExercícios Do Livro Elementos de Álgebra - Página 261MoisesToledo100% (2)
- 2014 Nucleo Imagem PDFDocumento10 pagine2014 Nucleo Imagem PDFAnthonny Gabryell LimaNessuna valutazione finora
- 2013 Dis Lelsilva PDFDocumento49 pagine2013 Dis Lelsilva PDFAnthonny Gabryell LimaNessuna valutazione finora
- 09123209042014estruturas Algebricas I Aula 5 PDFDocumento7 pagine09123209042014estruturas Algebricas I Aula 5 PDFAnthonny Gabryell LimaNessuna valutazione finora
- Sotomayor - Equaçoes Diferenciais Ordinárias PDFDocumento171 pagineSotomayor - Equaçoes Diferenciais Ordinárias PDFDaniel PiresNessuna valutazione finora
- 1 SM PDFDocumento12 pagine1 SM PDFAnthonny Gabryell LimaNessuna valutazione finora
- Aula OxigenoterapiaDocumento74 pagineAula OxigenoterapiaJau SantosNessuna valutazione finora
- 09123209042014estruturas Algebricas I Aula 5 PDFDocumento7 pagine09123209042014estruturas Algebricas I Aula 5 PDFAnthonny Gabryell LimaNessuna valutazione finora
- Sotomayor - Equaçoes Diferenciais Ordinárias PDFDocumento171 pagineSotomayor - Equaçoes Diferenciais Ordinárias PDFDaniel PiresNessuna valutazione finora
- 2014 Nucleo Imagem PDFDocumento10 pagine2014 Nucleo Imagem PDFAnthonny Gabryell LimaNessuna valutazione finora
- Teoria dos Grupos: Introdução aos Conceitos BásicosDocumento38 pagineTeoria dos Grupos: Introdução aos Conceitos BásicosAnthonny Gabryell LimaNessuna valutazione finora
- 1 SM PDFDocumento12 pagine1 SM PDFAnthonny Gabryell LimaNessuna valutazione finora
- Analise Real - Notas Aula CEDERJDocumento204 pagineAnalise Real - Notas Aula CEDERJRafael RosbackNessuna valutazione finora
- 2013 Dis Lelsilva PDFDocumento49 pagine2013 Dis Lelsilva PDFAnthonny Gabryell LimaNessuna valutazione finora
- 220 469 1 SM PDFDocumento12 pagine220 469 1 SM PDFAnthonny Gabryell LimaNessuna valutazione finora
- Livro de Analise-Novo PDFDocumento246 pagineLivro de Analise-Novo PDFJose Aldanilo ParnaibaNessuna valutazione finora
- Lista de Exercícios 1 PDFDocumento3 pagineLista de Exercícios 1 PDFWermersonNessuna valutazione finora
- Questões Física II ADocumento2 pagineQuestões Física II AErikikoNessuna valutazione finora
- Física: Cinemática e DinâmicaDocumento75 pagineFísica: Cinemática e DinâmicaLaerte Rafael SchneiderNessuna valutazione finora
- Índices de refração de líquidos com refractômetro de AbbeDocumento44 pagineÍndices de refração de líquidos com refractômetro de AbbeTomás MahalambeNessuna valutazione finora
- UFRPE prova de Mecânica Geral sobre forças em cordas, placas e centroideDocumento2 pagineUFRPE prova de Mecânica Geral sobre forças em cordas, placas e centroideLucas RodolfoNessuna valutazione finora
- Funções Polinomiais do 2o Grau: Trajetórias e AplicaçõesDocumento28 pagineFunções Polinomiais do 2o Grau: Trajetórias e AplicaçõesPapiro ReceitaNessuna valutazione finora
- Índices preçosDocumento6 pagineÍndices preçosClara GomesNessuna valutazione finora
- 02 - Apostila - Educação Matemática Na Educação Básica e No Ensino SuperiorDocumento79 pagine02 - Apostila - Educação Matemática Na Educação Básica e No Ensino SuperiorDimas Matos Silva100% (1)
- Ficha Matematica Trimestral FINALDocumento8 pagineFicha Matematica Trimestral FINALDulce PintoNessuna valutazione finora
- 10 1 1 468 539 PDFDocumento295 pagine10 1 1 468 539 PDFVitor HugoNessuna valutazione finora
- Medidas de posição estatísticasDocumento17 pagineMedidas de posição estatísticasLucas Henrique AndradeNessuna valutazione finora
- Dissonâncias rítmica e métrica: uma análise conceitualDocumento7 pagineDissonâncias rítmica e métrica: uma análise conceitualEliana Guglielmetti SulpicioNessuna valutazione finora
- Proposta de teste de avaliação de Matemática A para o 10o anoDocumento11 pagineProposta de teste de avaliação de Matemática A para o 10o anoLiliana Silva100% (1)
- Métodos emergentes de conservação de alimentos por radiação microondasDocumento39 pagineMétodos emergentes de conservação de alimentos por radiação microondasMárcia RodriguesNessuna valutazione finora
- Apostila de Programação de Computadores 1Documento441 pagineApostila de Programação de Computadores 1anaccoNessuna valutazione finora
- Aula 7 Cisalhamento Puro (Ajustado)Documento27 pagineAula 7 Cisalhamento Puro (Ajustado)Gabriela MellerNessuna valutazione finora
- Processo de extraçãoDocumento54 pagineProcesso de extraçãoHumberto MenaldoNessuna valutazione finora
- Apostila Res Mat Outubro 2012-Atualizada PDFDocumento168 pagineApostila Res Mat Outubro 2012-Atualizada PDFMaria Isabel LopesNessuna valutazione finora
- Medidas de tendência central e dispersão em estatística descritivaDocumento12 pagineMedidas de tendência central e dispersão em estatística descritivaVera SilvaNessuna valutazione finora
- DissertaçãoDocumento134 pagineDissertaçãofabioriemannNessuna valutazione finora
- DownloadDocumento7 pagineDownloadJoão PortelaNessuna valutazione finora
- Simulado 23 (Mat. 5º Ano) - Blog Do Prof. WarlesDocumento3 pagineSimulado 23 (Mat. 5º Ano) - Blog Do Prof. WarlesJose Felipe Lopes100% (1)
- Lista de DeterminantesDocumento7 pagineLista de DeterminantesJoão Pedro100% (1)
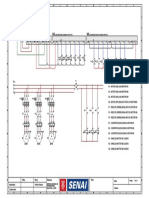
- Esquema elétrico de um sistema de controle de motoresDocumento1 paginaEsquema elétrico de um sistema de controle de motoresLuiz Carlos AguilellaNessuna valutazione finora
- Panorama histórico da estatísticaDocumento15 paginePanorama histórico da estatísticaEduardo Debiasi Andrade100% (1)
- 6 Paquimetro Sistema Ingles PDFDocumento9 pagine6 Paquimetro Sistema Ingles PDFLuciano BroboskiNessuna valutazione finora
- WEG Sca 05 Manual Da Comunicacao Profibus DP 0899.5818 Manual Portugues BRDocumento26 pagineWEG Sca 05 Manual Da Comunicacao Profibus DP 0899.5818 Manual Portugues BRginaldo35Nessuna valutazione finora
- Relatório de FlambagemDocumento26 pagineRelatório de FlambagemRaphael Rodrigues MirandaNessuna valutazione finora