Potrebbero piacerti anche
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Da EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Nessuna valutazione finora
- Analog Circuit Design: A Tutorial Guide to Applications and SolutionsDa EverandAnalog Circuit Design: A Tutorial Guide to Applications and SolutionsValutazione: 3.5 su 5 stelle3.5/5 (6)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Da EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Valutazione: 2.5 su 5 stelle2.5/5 (3)
- CAT 320 320 GC Hyd. SystemDocumento11 pagineCAT 320 320 GC Hyd. Systemeshopmanual baru90% (20)
- Power Supply Theory of OperationDocumento6 paginePower Supply Theory of OperationsaeidraminaNessuna valutazione finora
- Class D Com FonteDocumento29 pagineClass D Com FontenicchioNessuna valutazione finora
- 10 Tips and Tricks For Laser Engraving and CuttingDocumento16 pagine10 Tips and Tricks For Laser Engraving and CuttingDo Dang Khuong0% (2)
- LM25005, LM25010: Buck Regulator Topologies For Wide Input/Output Voltage DifferentialsDocumento10 pagineLM25005, LM25010: Buck Regulator Topologies For Wide Input/Output Voltage DifferentialsBejoy ThomasNessuna valutazione finora
- Rf2125 Linear AmplifierDocumento6 pagineRf2125 Linear Amplifiermichaelliu123456Nessuna valutazione finora
- APC200 TransmissionDocumento2 pagineAPC200 TransmissionNuñez Jesus100% (2)
- Understanding Changes in IEEE C62.11-2020Documento12 pagineUnderstanding Changes in IEEE C62.11-2020Harold NaiborhuNessuna valutazione finora
- Analog Sensor InterfacingDocumento5 pagineAnalog Sensor Interfacingkokolanski100% (1)
- Voltage To Frequency Converter Folosind Ci 555 TimerDocumento11 pagineVoltage To Frequency Converter Folosind Ci 555 TimerAl ZanoagaNessuna valutazione finora
- DiDocumento6 pagineDipani256Nessuna valutazione finora
- DiDocumento5 pagineDiTao Quang BinhNessuna valutazione finora
- Drdo PDFDocumento578 pagineDrdo PDFAbhishek GoelNessuna valutazione finora
- Signal Limiter For Power Amplifiers: (Formerly Application Note 103)Documento9 pagineSignal Limiter For Power Amplifiers: (Formerly Application Note 103)SaverioCorNessuna valutazione finora
- Iraudamp1 PDFDocumento22 pagineIraudamp1 PDFamijoski6051Nessuna valutazione finora
- Trabajo 2Documento18 pagineTrabajo 2ing_pemNessuna valutazione finora
- Data Ir2153Documento6 pagineData Ir2153mdkadryNessuna valutazione finora
- Document 1Documento8 pagineDocument 1Ali HassanNessuna valutazione finora
- That An103Documento8 pagineThat An103Andrea StipaNessuna valutazione finora
- 5.LDR Based Highways Road Light Failed Intimation Using GSMDocumento44 pagine5.LDR Based Highways Road Light Failed Intimation Using GSMfotronichs velloreNessuna valutazione finora
- Monolithic Difference Amplifiers: Difference (Subtractor) Amplifier ProductsDocumento10 pagineMonolithic Difference Amplifiers: Difference (Subtractor) Amplifier Productsv2304451Nessuna valutazione finora
- AND9218/D 5 Key Steps To Designing A Compact, High Efficiency PFC Stage Using The NCP1602Documento19 pagineAND9218/D 5 Key Steps To Designing A Compact, High Efficiency PFC Stage Using The NCP1602Jonatan LunaNessuna valutazione finora
- Iraudamp 1Documento22 pagineIraudamp 1luizcpimentaNessuna valutazione finora
- 2-15-1381147174-25 .Design of 1 V.FULL PDFDocumento10 pagine2-15-1381147174-25 .Design of 1 V.FULL PDFABHILASH RAINessuna valutazione finora
- Instrumentation AmplifiersDocumento8 pagineInstrumentation AmplifiersNima MoeenNessuna valutazione finora
- High Accuracy Impedance Measurements Using 12-Bit Impedance ConvertersDocumento6 pagineHigh Accuracy Impedance Measurements Using 12-Bit Impedance Converterschristobal_huntaNessuna valutazione finora
- ADIC ExperimentsDocumento41 pagineADIC ExperimentsTushar PatilNessuna valutazione finora
- Iraudamp1 - High Power Class D Audio Power Amplifier Using IR2011SDocumento24 pagineIraudamp1 - High Power Class D Audio Power Amplifier Using IR2011SChuYurNessuna valutazione finora
- 60W Wide-Range Power Supply For LCD Monitor or TV, Using The L5991Documento17 pagine60W Wide-Range Power Supply For LCD Monitor or TV, Using The L5991Grzegorz WegnerNessuna valutazione finora
- Instrumentation AmplifierDocumento3 pagineInstrumentation AmplifierFreddy LlusionNessuna valutazione finora
- ADC0808Documento15 pagineADC0808Ketan SalviNessuna valutazione finora
- High Power Class D Audio Power Amplifier Using IR2011SDocumento22 pagineHigh Power Class D Audio Power Amplifier Using IR2011SAbubakar SidikNessuna valutazione finora
- A 0.55 V 7-Bit 160 MSs Interpolated Pipeline ADC Using Dynamic AmplifiersDocumento4 pagineA 0.55 V 7-Bit 160 MSs Interpolated Pipeline ADC Using Dynamic AmplifiersThanos van RamNessuna valutazione finora
- Microchip CLC DescriptionDocumento12 pagineMicrochip CLC DescriptionKamlesh YadavNessuna valutazione finora
- Design Cicuit Power Electronic by PSIMDocumento14 pagineDesign Cicuit Power Electronic by PSIMTrương Văn TrọngNessuna valutazione finora
- CN0217Documento6 pagineCN0217alraca1234Nessuna valutazione finora
- Adc Design DasDocumento12 pagineAdc Design Dasemv_prasadNessuna valutazione finora
- AV02-2211EN AN - 5442 MGA-17516 07apr2011,0 PDFDocumento24 pagineAV02-2211EN AN - 5442 MGA-17516 07apr2011,0 PDFAnh Bien NguyenNessuna valutazione finora
- Viper22a Equivalent PDFDocumento16 pagineViper22a Equivalent PDFXande Nane Silveira0% (1)
- Experiment No. 4 ADC PDFDocumento16 pagineExperiment No. 4 ADC PDFRia Cordova0% (1)
- 06 Wireless ReportDocumento17 pagine06 Wireless ReportshastryNessuna valutazione finora
- WIRE LESS Land Mine Detection Robo-VehicleDocumento35 pagineWIRE LESS Land Mine Detection Robo-VehicleDebashish BeheraNessuna valutazione finora
- 3 Loop Gain Crossover FrequencyDocumento8 pagine3 Loop Gain Crossover Frequency양영주Nessuna valutazione finora
- LNK605 DatasheetDocumento18 pagineLNK605 DatasheetdgujarathiNessuna valutazione finora
- Opamp Linear Device 1300847494 PDFDocumento12 pagineOpamp Linear Device 1300847494 PDFNini FarribasNessuna valutazione finora
- Ancrct 4 ImpDocumento1 paginaAncrct 4 Impramesh_br85100% (1)
- ADC10D040 Dual 10-Bit, 40 MSPS, 267 MW A/D Converter: General Description FeaturesDocumento28 pagineADC10D040 Dual 10-Bit, 40 MSPS, 267 MW A/D Converter: General Description FeaturesskiziltoprakNessuna valutazione finora
- And8328 DDocumento8 pagineAnd8328 DJonatan LunaNessuna valutazione finora
- High Side Current SensingDocumento3 pagineHigh Side Current Sensingyatheesh_kcNessuna valutazione finora
- Application Note 106 February 2007 Instrumentation Circuitry Using RMS-to-DC ConvertersDocumento20 pagineApplication Note 106 February 2007 Instrumentation Circuitry Using RMS-to-DC ConvertersHahdNessuna valutazione finora
- 2.8-GHz Prescaler Keeps Cost Down PDFDocumento14 pagine2.8-GHz Prescaler Keeps Cost Down PDFagmnm1962Nessuna valutazione finora
- Designing Amplifiers With Tripath'S High-Power Class-T DriversDocumento9 pagineDesigning Amplifiers With Tripath'S High-Power Class-T Driversprasad357Nessuna valutazione finora
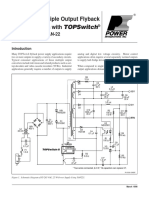
- Topswitch: Designing Multiple Output Flyback Power Supplies WithDocumento24 pagineTopswitch: Designing Multiple Output Flyback Power Supplies WithteomondoNessuna valutazione finora
- AND8099/D 5.0 V, 2.0 A Flyback Converter: Application NoteDocumento8 pagineAND8099/D 5.0 V, 2.0 A Flyback Converter: Application NoteIgor MairinckNessuna valutazione finora
- Enerchip Energy Processor For Energy Harvesting ApplicationsDocumento16 pagineEnerchip Energy Processor For Energy Harvesting Applicationsachew911Nessuna valutazione finora
- Manual - MillMinderDocumento15 pagineManual - MillMinderescorpion311Nessuna valutazione finora
- v42 63Documento5 paginev42 63Bala KumarNessuna valutazione finora
- Mini-Mosfet 18-30W PREAMPDocumento4 pagineMini-Mosfet 18-30W PREAMPMaria SilviaNessuna valutazione finora
- CN0216Documento5 pagineCN0216Ram VillaNessuna valutazione finora
- Designing DC Converters With SI9110Documento19 pagineDesigning DC Converters With SI9110Liem NguyenNessuna valutazione finora
- Motorola High Fidelity Amplifer 200WDocumento24 pagineMotorola High Fidelity Amplifer 200Wregelemar100% (2)
- Mackenzie MacFi-Mp Message RepeaterDocumento2 pagineMackenzie MacFi-Mp Message RepeaterdougclineNessuna valutazione finora
- Arduino Security and Alarm SystemDocumento5 pagineArduino Security and Alarm SystemRizqi FirmansyahNessuna valutazione finora
- NexansDocumento16 pagineNexansromany allamNessuna valutazione finora
- Abia State Polyechnic Aba, Abia State P.M.B 7166.: Department of Electrical Electronic EngineeringDocumento7 pagineAbia State Polyechnic Aba, Abia State P.M.B 7166.: Department of Electrical Electronic EngineeringKalu SamuelNessuna valutazione finora
- For The Digital Audio System DS-DB Digital Series Distribution Board and Amplifiers ManualDocumento56 pagineFor The Digital Audio System DS-DB Digital Series Distribution Board and Amplifiers ManualSISTEMAS INTELIGENTES SA DE CV SitecNessuna valutazione finora
- Trafoindo Catalogue Instrument Transformers PDFDocumento6 pagineTrafoindo Catalogue Instrument Transformers PDFwalet1Nessuna valutazione finora
- DBEC DATA Sheet Final - FAR PDFDocumento1 paginaDBEC DATA Sheet Final - FAR PDFMohd FarhanNessuna valutazione finora
- Sound Bar: Owner'S ManualDocumento28 pagineSound Bar: Owner'S ManualjakocNessuna valutazione finora
- Chassis DTC Summaries: Quick Reference Diagnostic GuideDocumento20 pagineChassis DTC Summaries: Quick Reference Diagnostic GuideAhmedAlbarragNessuna valutazione finora
- Atmel 42129 SAM D20 DatasheetDocumento653 pagineAtmel 42129 SAM D20 Datasheethunter73Nessuna valutazione finora
- Ultra Sonic DectorDocumento2 pagineUltra Sonic DectorSAMO SAMARANessuna valutazione finora
- Single Line DetailsDocumento2 pagineSingle Line Detailsgeorgadam1983Nessuna valutazione finora
- Spartan 25Documento4 pagineSpartan 25Marco RgNessuna valutazione finora
- Organo - Met.chem: PDF Generated At: Tue, 28 Dec 2010 12:28:45 UTCDocumento35 pagineOrgano - Met.chem: PDF Generated At: Tue, 28 Dec 2010 12:28:45 UTCdandinystNessuna valutazione finora
- User-Manual-Technical-Description - BTS - ALCATEL 9962Documento48 pagineUser-Manual-Technical-Description - BTS - ALCATEL 9962Miiguel PqNessuna valutazione finora
- Nice Fab Family enDocumento12 pagineNice Fab Family enchikmanNessuna valutazione finora
- SAP Mobile PDFDocumento31 pagineSAP Mobile PDFsatyendra singhNessuna valutazione finora
- Techson Brochure SEP NEWDocumento15 pagineTechson Brochure SEP NEWKamal SharmaNessuna valutazione finora
- System-On-Chip Design Introduction: Marcel Jacomet Bern University of Applied Sciences Bfh-Ti Huce-Microlab, Biel/BienneDocumento55 pagineSystem-On-Chip Design Introduction: Marcel Jacomet Bern University of Applied Sciences Bfh-Ti Huce-Microlab, Biel/BienneboppanamuralikrishnaNessuna valutazione finora
- Am29LV008B: 8 Megabit (1 M X 8-Bit) CMOS 3.0 Volt-Only Boot Sector Flash MemoryDocumento38 pagineAm29LV008B: 8 Megabit (1 M X 8-Bit) CMOS 3.0 Volt-Only Boot Sector Flash MemoryandersonbheringNessuna valutazione finora
- LMC64821 NDocumento22 pagineLMC64821 NLucaDirafNessuna valutazione finora
- D 8806 Paper Iii PDFDocumento32 pagineD 8806 Paper Iii PDFAryama MandalNessuna valutazione finora
- Alaska Plus Manual Manuel Alaska Plus Manual Alaska Plus Manual Alaska Plus Alaska Plus Manuell Manual Alaska PlusDocumento2 pagineAlaska Plus Manual Manuel Alaska Plus Manual Alaska Plus Manual Alaska Plus Alaska Plus Manuell Manual Alaska PlusSelim SloumaNessuna valutazione finora
- Front Elevation Rear Elevation: 50KVA, 3phase GensetDocumento8 pagineFront Elevation Rear Elevation: 50KVA, 3phase GensetAr Hanz Gerome SuarezNessuna valutazione finora
- SCZ 2370Documento2 pagineSCZ 2370dinkoheNessuna valutazione finora