Potrebbero piacerti anche
- Actividad 2Documento2 pagineActividad 2Fabian E Alfonso80% (5)
- NETFLIXDocumento2 pagineNETFLIXRicardo Andres Borja BenitezNessuna valutazione finora
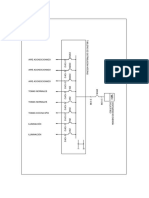
- Unifilar Model 1Documento1 paginaUnifilar Model 1Ricardo Andres Borja BenitezNessuna valutazione finora
- Impermeabilizacio-N Tanques PDFDocumento9 pagineImpermeabilizacio-N Tanques PDFAngela VillamilNessuna valutazione finora
- Curso de Programación de Macros en ExcelDocumento157 pagineCurso de Programación de Macros en ExcelJuan RuizNessuna valutazione finora
- Lo Que Necesitas Saber Sobre Los Tipos de Pulidos en Fibra ÓpticaDocumento6 pagineLo Que Necesitas Saber Sobre Los Tipos de Pulidos en Fibra ÓpticaRicardo Andres Borja BenitezNessuna valutazione finora
- Articulado Plan de Desarrollo 1Documento375 pagineArticulado Plan de Desarrollo 1Ricardo Andres Borja BenitezNessuna valutazione finora
- Cotización Karol HernandezDocumento1 paginaCotización Karol HernandezRicardo Andres Borja BenitezNessuna valutazione finora
- Inductor EsDocumento3 pagineInductor EsRicardo Andres Borja BenitezNessuna valutazione finora
- Educación Plan LectorDocumento1 paginaEducación Plan LectorRicardo Andres Borja BenitezNessuna valutazione finora
- Modelo Albarán ValoradoDocumento1 paginaModelo Albarán ValoradodonpatchhNessuna valutazione finora
- 4g en AvionesDocumento2 pagine4g en AvionesRicardo Andres Borja BenitezNessuna valutazione finora
- Evaluacion Tema 3 Costos y Presupuestos para Edificaciones I PDFDocumento2 pagineEvaluacion Tema 3 Costos y Presupuestos para Edificaciones I PDFRicardo Andres Borja BenitezNessuna valutazione finora
- Manual Practico para Investigacion de Mercado. Tema Vi PDFDocumento71 pagineManual Practico para Investigacion de Mercado. Tema Vi PDFPierina Karol100% (1)
- PrinprogDocumento14 paginePrinprogRicardo Andres Borja BenitezNessuna valutazione finora
- Proceso de Investigacion de MercadoDocumento0 pagineProceso de Investigacion de MercadoMauricio Hernández ScarpettaNessuna valutazione finora
- Orientaciones para La Instalacion de Redes Informáticos en Centros Educativos de Nueva Construccion-2 PDFDocumento23 pagineOrientaciones para La Instalacion de Redes Informáticos en Centros Educativos de Nueva Construccion-2 PDFRicardo Andres Borja BenitezNessuna valutazione finora
- (Ebook) El Lenguaje de Programacion C# (Spanish-Español)Documento496 pagine(Ebook) El Lenguaje de Programacion C# (Spanish-Español)api-2651672050% (2)
- Repetidor MotorolaDocumento2 pagineRepetidor MotorolaRicardo Andres Borja BenitezNessuna valutazione finora
- Panasonic TES824Documento286 paginePanasonic TES824Flavio FernandezNessuna valutazione finora
- Resume NDocumento7 pagineResume NRicardo Andres Borja BenitezNessuna valutazione finora
- Informe Enrutamiento EstaticoDocumento24 pagineInforme Enrutamiento EstaticoRicardo Andres Borja Benitez100% (1)
- El Lenguaje de Programacion C# - Javier CeballosDocumento313 pagineEl Lenguaje de Programacion C# - Javier CeballosDavid Ivan Patala Palacio100% (2)
- Proceso de Investigacion de MercadoDocumento0 pagineProceso de Investigacion de MercadoMauricio Hernández ScarpettaNessuna valutazione finora
- Comandos Routers Switches y Admon Redes CiscoDocumento4 pagineComandos Routers Switches y Admon Redes CiscoRicardo Andres Borja BenitezNessuna valutazione finora
- CT-149 La Compatibilidad ElectromagneticaDocumento34 pagineCT-149 La Compatibilidad ElectromagneticaneoflashNessuna valutazione finora
- CT-000 Publi2005Documento48 pagineCT-000 Publi2005Miguel LnNessuna valutazione finora
- Elementos de Diseño de Subestaciones - HarperDocumento594 pagineElementos de Diseño de Subestaciones - Harperyad595693% (15)
- Manual de Operaciones e Instalación Bhs Huawei Hg532tDocumento10 pagineManual de Operaciones e Instalación Bhs Huawei Hg532tRicardo Andres Borja BenitezNessuna valutazione finora
- Windows Server 2008Documento5 pagineWindows Server 2008blayarzNessuna valutazione finora
- Actividad de Puntos Evaluables - Escenario 2 - PRIMER BLOQUE-TEORICO - PRACTICO - SISTEMAS DIGITALES Y ENSAMBLADORES - (GRUPO2)Documento7 pagineActividad de Puntos Evaluables - Escenario 2 - PRIMER BLOQUE-TEORICO - PRACTICO - SISTEMAS DIGITALES Y ENSAMBLADORES - (GRUPO2)Amparo BolañosNessuna valutazione finora
- HT3 - 1 - HEUI Jean DennisDocumento11 pagineHT3 - 1 - HEUI Jean DennisplacidoNessuna valutazione finora
- Grupo 5 - Lab 8 y 9Documento20 pagineGrupo 5 - Lab 8 y 9paulNessuna valutazione finora
- Informe 7 Grupo A - BDocumento4 pagineInforme 7 Grupo A - BMauricio DonateloNessuna valutazione finora
- Informe de Diseño de Mezclas (MET. Modulo de Finura de La Combinacion de Agregados)Documento11 pagineInforme de Diseño de Mezclas (MET. Modulo de Finura de La Combinacion de Agregados)Diego Solano0% (1)
- Fichas Tecnicas de EsparragosDocumento5 pagineFichas Tecnicas de EsparragosRoberto Eduardo Salvador MonteroNessuna valutazione finora
- Catálogo Interruptores TERASAKIDocumento124 pagineCatálogo Interruptores TERASAKIAutomático GEMPILNessuna valutazione finora
- Almasenamiento 1DDocumento3 pagineAlmasenamiento 1Dmaximiliano23511Nessuna valutazione finora
- Datos de Transmision Bombas de Pulpa MoliendaDocumento2 pagineDatos de Transmision Bombas de Pulpa MoliendaJuan Pablo Diaz ChigneNessuna valutazione finora
- Crear Una Aplicacion Android en NetbeansDocumento11 pagineCrear Una Aplicacion Android en NetbeansAna-uj AcNessuna valutazione finora
- Ensayo Fábrica de BebésDocumento10 pagineEnsayo Fábrica de BebésAlejandro Rafael Castro HernandezNessuna valutazione finora
- Documentacion Echidna Black 0 - 0Documento6 pagineDocumentacion Echidna Black 0 - 0Oscar diaz rojasNessuna valutazione finora
- Diseño e Implementacion Brazo RobotDocumento102 pagineDiseño e Implementacion Brazo RobotLHCP50% (2)
- 3 Lab9 SQL PDFDocumento14 pagine3 Lab9 SQL PDFNicolas OcampoNessuna valutazione finora
- Unidad 2 - Fase 3 - Construir La Caja de Herramientas para La Gestión de Proyectos - Jose SilgadoDocumento6 pagineUnidad 2 - Fase 3 - Construir La Caja de Herramientas para La Gestión de Proyectos - Jose SilgadoEly SalgadoNessuna valutazione finora
- Cotización de Lubricantes Castrol - AZUL CONCRETO - #01Documento1 paginaCotización de Lubricantes Castrol - AZUL CONCRETO - #01Gabriel ZucchiNessuna valutazione finora
- Museo InstitucionalDocumento24 pagineMuseo InstitucionalMercedes GuebaraNessuna valutazione finora
- Cindy Flores P. Exposicion TecnologiaDocumento20 pagineCindy Flores P. Exposicion TecnologiaAlcides Muñoz OcasNessuna valutazione finora
- Desarrollo MDMDocumento21 pagineDesarrollo MDMJavier ManriqueNessuna valutazione finora
- Manual de Prácticas PLCDocumento12 pagineManual de Prácticas PLCJorge PillcoNessuna valutazione finora
- Practica de Curso EDX Energia Eléctrica Conceptos y Principios BásicosDocumento2 paginePractica de Curso EDX Energia Eléctrica Conceptos y Principios BásicosBrunoNessuna valutazione finora
- Circuitos MultivibradoresDocumento7 pagineCircuitos Multivibradoresjhainer15Nessuna valutazione finora
- Cadena de Suministro PRESENTACIONDocumento30 pagineCadena de Suministro PRESENTACIONSergio JavierNessuna valutazione finora
- Actividad 2 Software para Proyectos Industriales.Documento4 pagineActividad 2 Software para Proyectos Industriales.jorgeNessuna valutazione finora
- Ficha Técnica BMW 120ia (5puertas) Sport Line 2018.PDF - Asset.1507330572071Documento2 pagineFicha Técnica BMW 120ia (5puertas) Sport Line 2018.PDF - Asset.1507330572071Juan ValdezNessuna valutazione finora
- Sistema Freno AscensorDocumento43 pagineSistema Freno AscensorJose Luis Loyola Cisneros100% (1)
- Trabajo de Exposición #01Documento4 pagineTrabajo de Exposición #01Ronaldo Estrada MamaniNessuna valutazione finora
- Entrega Fase 4 Grupo 55Documento18 pagineEntrega Fase 4 Grupo 55Karina Salazar NuñezNessuna valutazione finora
- Elementos de Un Sistema Electrico IndustrialDocumento7 pagineElementos de Un Sistema Electrico Industrialmario villaNessuna valutazione finora