Potrebbero piacerti anche
- Namwook Kim - 2011 PDFDocumento9 pagineNamwook Kim - 2011 PDFAbderrezak BadjiNessuna valutazione finora
- Martin Bugár - 2016 PDFDocumento6 pagineMartin Bugár - 2016 PDFAbderrezak BadjiNessuna valutazione finora
- Bernard J - 2006 PDFDocumento6 pagineBernard J - 2006 PDFAbderrezak BadjiNessuna valutazione finora
- PDFDocumento6 paginePDFAbderrezak BadjiNessuna valutazione finora
- 1 s2.0 S0306261913003231 Main PDFDocumento9 pagine1 s2.0 S0306261913003231 Main PDFAbderrezak BadjiNessuna valutazione finora
- Plug-In Hybrid With Fuel Cell Battery Charger: G.J. SuppesDocumento9 paginePlug-In Hybrid With Fuel Cell Battery Charger: G.J. SuppesAbderrezak BadjiNessuna valutazione finora
- Simulation Modelling Practice and Theory: Kashif Ishaque, Zainal Salam, Hamed Taheri, SyafaruddinDocumento14 pagineSimulation Modelling Practice and Theory: Kashif Ishaque, Zainal Salam, Hamed Taheri, SyafaruddinAbderrezak BadjiNessuna valutazione finora
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- I-Smell TechnologyDocumento24 pagineI-Smell Technologyhimmatkanwar100% (3)
- Citation Longitude Brochure PDFDocumento16 pagineCitation Longitude Brochure PDFkispalerdoszoliNessuna valutazione finora
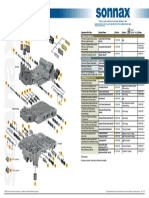
- Aisin AW TF-81SC: Click On Part Numbers For Product Details or VisitDocumento1 paginaAisin AW TF-81SC: Click On Part Numbers For Product Details or Visittejonmx100% (1)
- Base Industrial Engine EFI: 1.6-Litre 4-CylinderDocumento2 pagineBase Industrial Engine EFI: 1.6-Litre 4-CylinderTaimoor AhmedNessuna valutazione finora
- AC Servo Motor PDFDocumento40 pagineAC Servo Motor PDFRavindra Angal100% (1)
- HsDocumento97 pagineHspihkkNessuna valutazione finora
- Amstrad CPC Serial Interface User GuideDocumento23 pagineAmstrad CPC Serial Interface User GuideBrian LorpNessuna valutazione finora
- Recommended Practices For CNG Fueling Station Design, Construction and OperationDocumento35 pagineRecommended Practices For CNG Fueling Station Design, Construction and OperationStefan GhNessuna valutazione finora
- Smart Connection 7.2 User Guide For InDesignDocumento361 pagineSmart Connection 7.2 User Guide For InDesignMarina MiNessuna valutazione finora
- J1587 SIDs - EngineDocumento5 pagineJ1587 SIDs - EnginelibertyplusNessuna valutazione finora
- Pamantasan NG Lungsod NG MuntinlupaDocumento6 paginePamantasan NG Lungsod NG MuntinlupaLuis AbawagNessuna valutazione finora
- IT8711-FOSS and Cloud Computing Lab Manual ValliammaiDocumento128 pagineIT8711-FOSS and Cloud Computing Lab Manual ValliammaihariniNessuna valutazione finora
- 1997 UBC Vol 2Documento501 pagine1997 UBC Vol 2Ali KaroutNessuna valutazione finora
- 3.6.3 Function Block Diagram: 3 Operation TheoryDocumento2 pagine3.6.3 Function Block Diagram: 3 Operation TheoryAC DCNessuna valutazione finora
- SPNGN1101S01L01Documento23 pagineSPNGN1101S01L01Rebecca OwensNessuna valutazione finora
- Distributed Systems Principles and Paradigms: Second Edition Andrew S. Tanenbaum Maarten Van SteenDocumento22 pagineDistributed Systems Principles and Paradigms: Second Edition Andrew S. Tanenbaum Maarten Van Steend0lcevita2112Nessuna valutazione finora
- Biomedical 7-8Documento20 pagineBiomedical 7-8முத்துலிங்கம். பால்ராஜ்Nessuna valutazione finora
- Artificial Intelligence: Three Domains of AIDocumento4 pagineArtificial Intelligence: Three Domains of AIRIYA ARORA34 IX-CNessuna valutazione finora
- Library - Management - Project Report by Vaishali & Sukhwinder Kaur BCA (3rd Yr.)Documento64 pagineLibrary - Management - Project Report by Vaishali & Sukhwinder Kaur BCA (3rd Yr.)Naveen SharmaNessuna valutazione finora
- Product Highlights: All Gigabit PortsDocumento5 pagineProduct Highlights: All Gigabit Portssaumal20Nessuna valutazione finora
- Energy Management and Heat Storage For Solar Adsorption CoolingDocumento11 pagineEnergy Management and Heat Storage For Solar Adsorption CoolingRendy Adhi RachmantoNessuna valutazione finora
- OpTransactionHistory02 12 2019Documento4 pagineOpTransactionHistory02 12 2019Vijay KumarNessuna valutazione finora
- Release 6.0: Technical Solution ManualDocumento14 pagineRelease 6.0: Technical Solution ManualcosconorNessuna valutazione finora
- What Exactly Is An Information SystemDocumento2 pagineWhat Exactly Is An Information SystemPeir Gen LowNessuna valutazione finora
- Ac-Aud 3Documento10 pagineAc-Aud 3Mark Anthony TibuleNessuna valutazione finora
- 4ipnet Solution HotelDocumento27 pagine4ipnet Solution HotelAdrian Gamboa MarcellanaNessuna valutazione finora
- DESIGN AND SIMULATION OF 2-TO-4 DECODER USING 32nm, 45nm AND 65nm CMOS TECHNOLOGYDocumento4 pagineDESIGN AND SIMULATION OF 2-TO-4 DECODER USING 32nm, 45nm AND 65nm CMOS TECHNOLOGYijsret0% (1)
- DS01071 XNX Universal Transmitter FLR 8-3-11Documento4 pagineDS01071 XNX Universal Transmitter FLR 8-3-11itskittylimNessuna valutazione finora
- Pa0043 Sub Conor O'donnell PDFDocumento7 paginePa0043 Sub Conor O'donnell PDFTheNewChildrensHospitalNessuna valutazione finora
- Methods, Processes and Equipment Involved in Manufacturing of PlasticDocumento34 pagineMethods, Processes and Equipment Involved in Manufacturing of PlasticNiño Gerard JabagatNessuna valutazione finora