Potrebbero piacerti anche
- Design of A Non-Ideal Buck ConverterDocumento13 pagineDesign of A Non-Ideal Buck ConverterJames Xgun100% (1)
- Ecee Colorado Edu Copec Book Slides Ch1slide PDFDocumento35 pagineEcee Colorado Edu Copec Book Slides Ch1slide PDFVikram BorawakeNessuna valutazione finora
- Fundamentals of Power Electronics: Robert W. Erickson University of Colorado, BoulderDocumento35 pagineFundamentals of Power Electronics: Robert W. Erickson University of Colorado, BoulderMohammed AL-MaaitahNessuna valutazione finora
- Chapter 9. Controller Design: 9.2. Effect of Negative Feedback On The Network Transfer FunctionsDocumento74 pagineChapter 9. Controller Design: 9.2. Effect of Negative Feedback On The Network Transfer Functionsbojan 2Nessuna valutazione finora
- Input Filter Design by EricksonDocumento49 pagineInput Filter Design by EricksonshrikrisNessuna valutazione finora
- Fundamentals of Power Electronics: Robert W. Erickson University of Colorado, BoulderDocumento35 pagineFundamentals of Power Electronics: Robert W. Erickson University of Colorado, BoulderAhmedoNessuna valutazione finora
- Aula6 - ConversoresDocumento26 pagineAula6 - ConversoreslucianoNessuna valutazione finora
- Topology Review DC DC ConvertersDocumento54 pagineTopology Review DC DC ConvertersaknuslNessuna valutazione finora
- Chapter 8. Converter Transfer Functions: 8.1. Review of Bode PlotsDocumento103 pagineChapter 8. Converter Transfer Functions: 8.1. Review of Bode Plotsbojan 2Nessuna valutazione finora
- Chapter 15 Transformer DesignDocumento14 pagineChapter 15 Transformer Designkaren dejoNessuna valutazione finora
- CH 2 SlideDocumento45 pagineCH 2 Slidemukesh00007Nessuna valutazione finora
- Buck Boost ReportDocumento10 pagineBuck Boost ReportKarThiNessuna valutazione finora
- Sill Analog Digital ConverterDocumento77 pagineSill Analog Digital Converternicinha_Nessuna valutazione finora
- CH 15 SlidesDocumento40 pagineCH 15 SlidesAkhileshkumar PandeyNessuna valutazione finora
- PID Buck-BoostDocumento8 paginePID Buck-BoostIvan RahmanNessuna valutazione finora
- Input Filter Design For SMPSDocumento21 pagineInput Filter Design For SMPSsenkum812002Nessuna valutazione finora
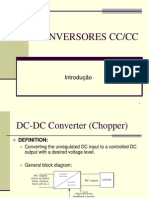
- DC DC ConvertersDocumento26 pagineDC DC ConvertersJuan Francisco ValenzuelaNessuna valutazione finora
- Switch Mode ConvertersDocumento28 pagineSwitch Mode ConvertersHemantha KumarNessuna valutazione finora
- Switch Mode ConvertersDocumento28 pagineSwitch Mode ConvertersAniruddh KashyapNessuna valutazione finora
- Digital Filter Design For Analogue EngineersDocumento15 pagineDigital Filter Design For Analogue EngineersVinicius FigueiredoNessuna valutazione finora
- El T I III Electronics III: - Power Dissipation in CMOS Digital Circuits - Optimization of Chain of InvertersDocumento23 pagineEl T I III Electronics III: - Power Dissipation in CMOS Digital Circuits - Optimization of Chain of InvertersSaied Aly SalamahNessuna valutazione finora
- Erickson Slides DC-DC CCMDocumento45 pagineErickson Slides DC-DC CCMAlberto Valenzuela OrtizNessuna valutazione finora
- Chap 2 Erickson Fundamentals of Power Electronics PDFDocumento45 pagineChap 2 Erickson Fundamentals of Power Electronics PDFhenrypatriciomunoz1Nessuna valutazione finora
- Principles of Steady-State Converter AnalysisDocumento45 paginePrinciples of Steady-State Converter AnalysisTrung Hiếu ETNessuna valutazione finora
- Asymmetric Half Bridge (AHB) Converters - by FairchildDocumento19 pagineAsymmetric Half Bridge (AHB) Converters - by FairchildahsansadaqatNessuna valutazione finora
- Aula Conversores CC-CC BásicosDocumento44 pagineAula Conversores CC-CC BásicosVirgílio TávoraNessuna valutazione finora
- Improved Power Quality AC-DC Converters With High Frequency Transformer IsolationDocumento69 pagineImproved Power Quality AC-DC Converters With High Frequency Transformer IsolationZlatian RaduNessuna valutazione finora
- Chapter 5 Optimum Baseband ReceiverDocumento16 pagineChapter 5 Optimum Baseband ReceiverMohamed Fahmy100% (1)
- Designing DC-DC Converters Based On ZETA TopologyDocumento8 pagineDesigning DC-DC Converters Based On ZETA TopologyMayeth MacedaNessuna valutazione finora
- LLec15 Thermistor ADC PDFDocumento6 pagineLLec15 Thermistor ADC PDFNguyễn Thị Tài LinhNessuna valutazione finora
- DAC1020Documento14 pagineDAC1020micochangoNessuna valutazione finora
- Ac Lab CompleteDocumento50 pagineAc Lab CompletePraveen ChittiNessuna valutazione finora
- Power Converters LabDocumento53 paginePower Converters LabK Kiran VishnuNessuna valutazione finora
- 7Documento17 pagine7DrÖzkan Ahmed AtarNessuna valutazione finora
- Homework Assignment #1 Basic Converter Analysis Due at 10 Am MDT On Friday, September 7, 2017Documento3 pagineHomework Assignment #1 Basic Converter Analysis Due at 10 Am MDT On Friday, September 7, 2017ollata kalanoNessuna valutazione finora
- Amplifier Frequency ResponseDocumento33 pagineAmplifier Frequency ResponseHidayah HadiNessuna valutazione finora
- PNP General Purpose Amplifier: Absolute Maximum RatingsDocumento10 paginePNP General Purpose Amplifier: Absolute Maximum Ratingsmike_helplineNessuna valutazione finora
- Rabaey Chapter5Documento78 pagineRabaey Chapter5Vijay Kumar TNessuna valutazione finora
- Improved Design of Three-Level NPC Inverters in Comparison To Two-Level InvertersDocumento10 pagineImproved Design of Three-Level NPC Inverters in Comparison To Two-Level InvertersEdamEdamNessuna valutazione finora
- Vlsi Design & TechnolgyDocumento60 pagineVlsi Design & TechnolgyDimple GalaNessuna valutazione finora
- CH 3 SlideDocumento33 pagineCH 3 SlideDenis EmilioNessuna valutazione finora
- 06ESL37 Analog Electronics Lab MANUALDocumento71 pagine06ESL37 Analog Electronics Lab MANUALsunilsathishNessuna valutazione finora
- Tda 2030 ADocumento14 pagineTda 2030 ATetelodukaNessuna valutazione finora
- Bt21ece102 Dmlab Assignment-01Documento21 pagineBt21ece102 Dmlab Assignment-01S075 Abhishek DeshmukhNessuna valutazione finora
- Hoja de Datos Del TDA 7439Documento20 pagineHoja de Datos Del TDA 7439_el_patriarca_Nessuna valutazione finora
- Design of Rogowski Coil With IntegratorDocumento32 pagineDesign of Rogowski Coil With Integratorourbobby100% (1)
- Euler's PathDocumento10 pagineEuler's PathSatish Kumar0% (1)
- EE42 100 Wb-Lecture19 080713-FDocumento37 pagineEE42 100 Wb-Lecture19 080713-FozanistzNessuna valutazione finora
- AND8026/D Solving EMI and ESD Problems With Integrated Passive Device Low Pass Pi FiltersDocumento16 pagineAND8026/D Solving EMI and ESD Problems With Integrated Passive Device Low Pass Pi FiltersAtakan OzturKNessuna valutazione finora
- Boost ConverterDocumento10 pagineBoost ConverterCaio CezarNessuna valutazione finora
- The Discontinuous Conduction ModeDocumento37 pagineThe Discontinuous Conduction ModeEdson JuniorNessuna valutazione finora
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Da EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Valutazione: 2.5 su 5 stelle2.5/5 (3)
- Analog Circuit Design Volume 2: Immersion in the Black Art of Analog DesignDa EverandAnalog Circuit Design Volume 2: Immersion in the Black Art of Analog DesignNessuna valutazione finora
- Analog Circuit Design: A Tutorial Guide to Applications and SolutionsDa EverandAnalog Circuit Design: A Tutorial Guide to Applications and SolutionsValutazione: 3.5 su 5 stelle3.5/5 (6)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Da EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Nessuna valutazione finora
- Audio IC Projects: A Collection of Useful Circuits Based on Readily Available ChipsDa EverandAudio IC Projects: A Collection of Useful Circuits Based on Readily Available ChipsNessuna valutazione finora