Potrebbero piacerti anche
- Elementos Básicos de DiseñoDocumento15 pagineElementos Básicos de DiseñoWilliam Steven Triana GarciaNessuna valutazione finora
- Taller #3Documento1 paginaTaller #3William Steven Triana GarciaNessuna valutazione finora
- IntroducciónDocumento13 pagineIntroducciónWilliam Steven Triana GarciaNessuna valutazione finora
- Modelamiento de Sistemas Dinámicos Llenado de TanquesDocumento6 pagineModelamiento de Sistemas Dinámicos Llenado de TanquesWilliam Steven Triana GarciaNessuna valutazione finora
- Taller Nº2 Corte 3 ModernaDocumento1 paginaTaller Nº2 Corte 3 ModernaWilliam Steven Triana GarciaNessuna valutazione finora
- Semana 5b - Asignación A Redes Con CongestiónDocumento22 pagineSemana 5b - Asignación A Redes Con CongestiónWilliam Steven Triana GarciaNessuna valutazione finora
- Semana 5a - Asignación A Redes Sin CongestiónDocumento17 pagineSemana 5a - Asignación A Redes Sin CongestiónWilliam Steven Triana GarciaNessuna valutazione finora
- Laboratorio HidraulicosDocumento5 pagineLaboratorio HidraulicosWilliam Steven Triana GarciaNessuna valutazione finora
- p7 Taller Inter TermodinamicoDocumento8 paginep7 Taller Inter TermodinamicoWilliam Steven Triana GarciaNessuna valutazione finora
- Proyecto Motor DCDocumento9 pagineProyecto Motor DCWilliam Steven Triana GarciaNessuna valutazione finora
- Taller 2 MODELAMIENTO DE SISTEMAS ELECTRO-TERMO-MECÁNICOSDocumento17 pagineTaller 2 MODELAMIENTO DE SISTEMAS ELECTRO-TERMO-MECÁNICOSWilliam Steven Triana GarciaNessuna valutazione finora
- Taller 3 Informe Simulación de Un Proceso TermodinámicoDocumento9 pagineTaller 3 Informe Simulación de Un Proceso TermodinámicoWilliam Steven Triana GarciaNessuna valutazione finora
- Taller Dinámica de MotorDocumento5 pagineTaller Dinámica de MotorWilliam Steven Triana GarciaNessuna valutazione finora
- Trabajo Final de NeumáticaDocumento9 pagineTrabajo Final de NeumáticaWilliam Steven Triana GarciaNessuna valutazione finora
- Taller 3Documento3 pagineTaller 3William Steven Triana GarciaNessuna valutazione finora
- Guía de Actividades y Rúbrica de Evaluación Tarea 2. Contexto y Aplicación de Los Elementos Del Sistema de Gestión de La CalidadDocumento9 pagineGuía de Actividades y Rúbrica de Evaluación Tarea 2. Contexto y Aplicación de Los Elementos Del Sistema de Gestión de La CalidadWilliam Steven Triana GarciaNessuna valutazione finora
- Tarea 2 - Contexto y Aplicación de Los Sistemas de Gestión de CalidadDocumento10 pagineTarea 2 - Contexto y Aplicación de Los Sistemas de Gestión de CalidadWilliam Steven Triana GarciaNessuna valutazione finora
- Guia de Actividades y Rúbrica de Evaluación - Unidad 1 - Fase 2 - Análisis y Solución Caso 1Documento10 pagineGuia de Actividades y Rúbrica de Evaluación - Unidad 1 - Fase 2 - Análisis y Solución Caso 1William Steven Triana GarciaNessuna valutazione finora
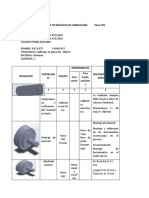
- Carta Tegnologica de Una Pieza en CNCDocumento4 pagineCarta Tegnologica de Una Pieza en CNCWilliam Steven Triana GarciaNessuna valutazione finora
- Syllabus Universidad de La SalleDocumento10 pagineSyllabus Universidad de La SalleWilliam Steven Triana GarciaNessuna valutazione finora
- Ciclos de Mecanizado Torno2010-1Documento9 pagineCiclos de Mecanizado Torno2010-1William Steven Triana GarciaNessuna valutazione finora
- B LIBRO Tecnicas de Mantenimiento IndustrialDocumento246 pagineB LIBRO Tecnicas de Mantenimiento IndustrialJesus RicherNessuna valutazione finora
- Prodoc Mario GonzalezDocumento24 pagineProdoc Mario GonzalezMario Gonzalez JimenezNessuna valutazione finora
- Memoria Descriptiva ArquitecturaDocumento5 pagineMemoria Descriptiva ArquitecturaMadeley FloresNessuna valutazione finora
- Capitulo 2Documento4 pagineCapitulo 2Kellie Montero Arrasco0% (1)
- Clase 3 Eficacia y EficienciaDocumento14 pagineClase 3 Eficacia y Eficienciajhonpierre ugarte maldonadoNessuna valutazione finora
- Procedimiento General de La Construcción de Un PuenteDocumento38 pagineProcedimiento General de La Construcción de Un PuenteJesus MorenoNessuna valutazione finora
- Diseño de Estribos en Columnas (Version 2)Documento2 pagineDiseño de Estribos en Columnas (Version 2)clamavi100% (1)
- Manual de La CalderaDocumento149 pagineManual de La CalderaHenry RojasNessuna valutazione finora
- 07 ALQUI-20160807 - MINERIA Y EXPORACIÓN - Alquiler de Grupos ElectrogenosDocumento3 pagine07 ALQUI-20160807 - MINERIA Y EXPORACIÓN - Alquiler de Grupos ElectrogenosCindyCaycho100% (2)
- Diapositivas de - Qué Es La Demanda EsperadaDocumento36 pagineDiapositivas de - Qué Es La Demanda Esperadalovely celesteNessuna valutazione finora
- El DiagnosticoDocumento50 pagineEl Diagnostico王賽拉Nessuna valutazione finora
- Pensum IngDocumento1 paginaPensum Ingjazmin vargasNessuna valutazione finora
- Investig. Operativa Tomo IDocumento356 pagineInvestig. Operativa Tomo IJosé Ruiz89% (19)
- Incremento de La Productividad en Soldadura y CorteDocumento63 pagineIncremento de La Productividad en Soldadura y CorteMax RosasNessuna valutazione finora
- Adquisicion ContableDocumento65 pagineAdquisicion Contablemanuellanda100% (1)
- Diagnostico de MantenimientoDocumento14 pagineDiagnostico de MantenimientoAntoni Ricardo100% (1)
- Modulos EstandaresDocumento31 pagineModulos EstandaresDayana MedinaNessuna valutazione finora
- Bebb31 E2018052315fe2ff2gestindelmantenimientodelosequiposproductivos PDFDocumento47 pagineBebb31 E2018052315fe2ff2gestindelmantenimientodelosequiposproductivos PDFJavier Olivares100% (1)
- Capítulo II Procesos de La Ingeniería de RequerimientosDocumento3 pagineCapítulo II Procesos de La Ingeniería de RequerimientosLuis Angel RNessuna valutazione finora
- INTRODUCCIÓNDocumento8 pagineINTRODUCCIÓNMercy CruzNessuna valutazione finora
- Wolsvagen PDFDocumento10 pagineWolsvagen PDFAlexVelascoNessuna valutazione finora
- 20180911 (1)Documento16 pagine20180911 (1)Cristopher Jimenez CaceresNessuna valutazione finora
- 8.0 - Tren de Potencia 797FDocumento49 pagine8.0 - Tren de Potencia 797FChristian Perez100% (1)
- AERRE Catalogo 6800Documento5 pagineAERRE Catalogo 6800renanskNessuna valutazione finora
- Cuestionario de Reseña Historica de I.O.Documento3 pagineCuestionario de Reseña Historica de I.O.Duvan Rodriguez100% (1)
- Diagrama de PourbaixDocumento1 paginaDiagrama de PourbaixLuis RomeroNessuna valutazione finora
- Capitulo 16 Grupo Control e Integracion TempusDocumento17 pagineCapitulo 16 Grupo Control e Integracion TempusDiego Butrón Monterola100% (2)
- Sistema de TarapotoDocumento14 pagineSistema de TarapotoAlfredo Bartra MontillaNessuna valutazione finora
- Determinacion de La Abrasividad de Las RocasDocumento21 pagineDeterminacion de La Abrasividad de Las RocasJhoel Enrique100% (1)
- Cuencas Extensivas Por Inversión TectónicaDocumento15 pagineCuencas Extensivas Por Inversión TectónicaJefferson Guerron0% (1)