Potrebbero piacerti anche
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Advantages and Disadvantages of Five Modes of TransportationDocumento15 pagineAdvantages and Disadvantages of Five Modes of TransportationnishantNessuna valutazione finora
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Customer Service: ConceptDocumento15 pagineCustomer Service: ConceptnishantNessuna valutazione finora
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
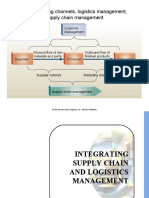
- Relating Marketing Channels, Logistics Management, and Supply Chain ManagementDocumento15 pagineRelating Marketing Channels, Logistics Management, and Supply Chain ManagementnishantNessuna valutazione finora
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Customer Service: ConceptDocumento15 pagineCustomer Service: ConceptnishantNessuna valutazione finora
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Advantages and Disadvantages of Five Modes of TransportationDocumento15 pagineAdvantages and Disadvantages of Five Modes of TransportationnishantNessuna valutazione finora
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Advantages and Disadvantages of Five Modes of TransportationDocumento15 pagineAdvantages and Disadvantages of Five Modes of TransportationnishantNessuna valutazione finora
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Supply Chain Management and Marketing StrategyDocumento15 pagineSupply Chain Management and Marketing StrategynishantNessuna valutazione finora
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Plant Maintenance Terms For SAPDocumento5 paginePlant Maintenance Terms For SAPrhys_gauravNessuna valutazione finora
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Physical Protection From Human Attackers: - One Example Why Physical Security Should Be Taken Very SeriouslyDocumento16 paginePhysical Protection From Human Attackers: - One Example Why Physical Security Should Be Taken Very SeriouslynishantNessuna valutazione finora
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- JjhyyDocumento16 pagineJjhyynishantNessuna valutazione finora
- SAP Terminology: Definition:: Functional LocationDocumento6 pagineSAP Terminology: Definition:: Functional LocationnishantNessuna valutazione finora
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Transport Security: Costs, Benefits and The Way ForwardDocumento13 pagineTransport Security: Costs, Benefits and The Way ForwardnishantNessuna valutazione finora
- Plant Maintenance Terms For SAPDocumento5 paginePlant Maintenance Terms For SAPrhys_gauravNessuna valutazione finora
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- Rhtumm 334Documento124 pagineRhtumm 334nishantNessuna valutazione finora
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- Run Simple With GST: Discrete Manufacturing and AutoDocumento6 pagineRun Simple With GST: Discrete Manufacturing and AutonishantNessuna valutazione finora
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Rhtumm 334Documento124 pagineRhtumm 334nishantNessuna valutazione finora
- Dfty 2018Documento4 pagineDfty 2018nishantNessuna valutazione finora
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Msds Report CPCBNov08Documento75 pagineMsds Report CPCBNov08Abhilash S KumarNessuna valutazione finora
- Growth in Time DebtDocumento6 pagineGrowth in Time DebtAli BrelandNessuna valutazione finora
- Ugc SolutionDocumento174 pagineUgc SolutionNirmal Pandey100% (1)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Aat 987Documento2 pagineAat 987nishantNessuna valutazione finora
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- 4556Documento84 pagine4556nishantNessuna valutazione finora
- OmeDocumento8 pagineOmenishantNessuna valutazione finora
- On The Reception and Detection of Pseudo-Profound BullshitDocumento15 pagineOn The Reception and Detection of Pseudo-Profound BullshitittsukanNessuna valutazione finora
- Placement 55845d16bc72dDocumento24 paginePlacement 55845d16bc72dnishantNessuna valutazione finora
- LQWOPMCBRNhtatore 001 Data 421Documento440 pagineLQWOPMCBRNhtatore 001 Data 421nishantNessuna valutazione finora
- GL DirectoryDocumento13 pagineGL DirectoryMathew CherianNessuna valutazione finora
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- BRIL AnnualReport 2013 2014Documento104 pagineBRIL AnnualReport 2013 2014nishantNessuna valutazione finora
- KMCBRNhtatore 001 Data 421Documento324 pagineKMCBRNhtatore 001 Data 421nishantNessuna valutazione finora
- Kumaun University, Nainital Department of Mathematics: B.A./B. Sc. Mathematics Course Structure (Semester System)Documento7 pagineKumaun University, Nainital Department of Mathematics: B.A./B. Sc. Mathematics Course Structure (Semester System)Ashutosh NegiNessuna valutazione finora
- Fractal PDFDocumento9 pagineFractal PDFMukundNessuna valutazione finora
- Maths Practice Paper 10 With AnswersDocumento17 pagineMaths Practice Paper 10 With AnswersVijay KesanapalliNessuna valutazione finora
- Target: Jee (Advanced) 2019: P H Y S I C SDocumento8 pagineTarget: Jee (Advanced) 2019: P H Y S I C SraghavbhatiaNessuna valutazione finora
- 10th Maths EM Public Exam July 2023 Supplementary Exam Original QuestionDocumento8 pagine10th Maths EM Public Exam July 2023 Supplementary Exam Original QuestionT M KuthubudeenNessuna valutazione finora
- 4024 s12 QP 22Documento20 pagine4024 s12 QP 22Beatrice RossNessuna valutazione finora
- Weekly Exam 5: Solid Mensuration/ Analytic Geometry 1Documento2 pagineWeekly Exam 5: Solid Mensuration/ Analytic Geometry 1Jonas ParreñoNessuna valutazione finora
- Astm g99 95aDocumento6 pagineAstm g99 95aSuraj Rarath0% (1)
- Syllabi 2018-19 UG Science PDFDocumento203 pagineSyllabi 2018-19 UG Science PDFBhuvi Miya0% (1)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Accident Detection Using Hardware: IjarcceDocumento2 pagineAccident Detection Using Hardware: IjarcceRaihanNessuna valutazione finora
- Math 6Documento9 pagineMath 6Daniela Erika Beredo InandanNessuna valutazione finora
- Physical Limitations of Antennas NewDocumento19 paginePhysical Limitations of Antennas NewdilaawaizNessuna valutazione finora
- Formula Maths SPMDocumento1 paginaFormula Maths SPMMathana SuriaNessuna valutazione finora
- Fig. 2.1. Element For One Dimension Heat Conduction EquationDocumento3 pagineFig. 2.1. Element For One Dimension Heat Conduction EquationashwaqNessuna valutazione finora
- PhysicsDocumento3 paginePhysicsRaj Gupta0% (1)
- Chapter 13 Derivative As A Rate MeasurerDocumento22 pagineChapter 13 Derivative As A Rate MeasurerkavithavenkatesanNessuna valutazione finora
- Chapter - 23 - Continuous Charge Distributions and Gauss - S - Law PDFDocumento25 pagineChapter - 23 - Continuous Charge Distributions and Gauss - S - Law PDFfatima alyammahyNessuna valutazione finora
- Land Survey Using Drones PDFDocumento9 pagineLand Survey Using Drones PDFSherin AlmeidaNessuna valutazione finora
- MathematicianDocumento230 pagineMathematicianBalderas, Marjiell A.Nessuna valutazione finora
- Class 10 Maths SA2Documento10 pagineClass 10 Maths SA2Priyank GuptaNessuna valutazione finora
- Technical Inquiries For API Standard 620, Design & Construction of Large, Welded, Low-Pressure Storage TanksDocumento12 pagineTechnical Inquiries For API Standard 620, Design & Construction of Large, Welded, Low-Pressure Storage TanksPhượng NguyễnNessuna valutazione finora
- The Invisible World of Infinitesimals/book Lambert Academic PublishingDocumento15 pagineThe Invisible World of Infinitesimals/book Lambert Academic PublishingGeorge Mpantes mathematics teacher100% (1)
- Ug Nep 5th and 6th Sem MathematicsDocumento18 pagineUg Nep 5th and 6th Sem Mathematicsmuskanmullamulla25Nessuna valutazione finora
- Conformal Mapping - L - BieberbachDocumento241 pagineConformal Mapping - L - BieberbachSoumya Sinha BabuNessuna valutazione finora
- Electromagnetism. Module 1 - Electrical Current An PDFDocumento32 pagineElectromagnetism. Module 1 - Electrical Current An PDFnesh07Nessuna valutazione finora
- Metatrons CubeDocumento4 pagineMetatrons CubeCreators CollegeNessuna valutazione finora
- (전자기학 jackson 솔루션) 전자기학 jackson 솔루션 65 4000 PDFDocumento65 pagine(전자기학 jackson 솔루션) 전자기학 jackson 솔루션 65 4000 PDFgbsNessuna valutazione finora
- Chapter 2 Electrostatic Potential and CapacitanceDocumento47 pagineChapter 2 Electrostatic Potential and CapacitanceThej ThanayNessuna valutazione finora
- USCG-Course in Navigation!!!!Documento172 pagineUSCG-Course in Navigation!!!!Andrei Vasile100% (1)
- Hastrof Si Cantril. 1954. The Saw A Game. A Case StudyDocumento6 pagineHastrof Si Cantril. 1954. The Saw A Game. A Case Studylandreea21Nessuna valutazione finora
- A Beginner's Guide to Constructing the Universe: The Mathematical Archetypes of Nature, Art, and ScienceDa EverandA Beginner's Guide to Constructing the Universe: The Mathematical Archetypes of Nature, Art, and ScienceValutazione: 4 su 5 stelle4/5 (51)
- Knocking on Heaven's Door: How Physics and Scientific Thinking Illuminate the Universe and the Modern WorldDa EverandKnocking on Heaven's Door: How Physics and Scientific Thinking Illuminate the Universe and the Modern WorldValutazione: 3.5 su 5 stelle3.5/5 (64)
- Dark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseDa EverandDark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseValutazione: 3.5 su 5 stelle3.5/5 (69)
- A Brief History of Time: From the Big Bang to Black HolesDa EverandA Brief History of Time: From the Big Bang to Black HolesValutazione: 4 su 5 stelle4/5 (2193)
- Summary and Interpretation of Reality TransurfingDa EverandSummary and Interpretation of Reality TransurfingValutazione: 5 su 5 stelle5/5 (5)
- The Beauty of Falling: A Life in Pursuit of GravityDa EverandThe Beauty of Falling: A Life in Pursuit of GravityNessuna valutazione finora