Potrebbero piacerti anche
- Parts Manual Parts Manual Service Manual: Reach TrucksDocumento22 pagineParts Manual Parts Manual Service Manual: Reach TrucksChristian Bedoya10% (10)
- Epicyclic Gear Train ExperimentDocumento6 pagineEpicyclic Gear Train Experimentshuyun88100% (6)
- Epicyclical Gear Train System Lab ReportDocumento15 pagineEpicyclical Gear Train System Lab ReportIbrahim Hussain50% (2)
- Optimization of Planetary Gear Box For High Reduction RatioDocumento12 pagineOptimization of Planetary Gear Box For High Reduction RatioNovriansyah BrianNessuna valutazione finora
- Cat Sos 793&793b TrucksDocumento7 pagineCat Sos 793&793b TrucksmkNessuna valutazione finora
- Design of A Two-Stage Cycloidal Gear Reducer WithDocumento14 pagineDesign of A Two-Stage Cycloidal Gear Reducer WithAlejandro ChavezNessuna valutazione finora
- Mechanism and Machine Theory: Wen-Hsiang HsiehDocumento23 pagineMechanism and Machine Theory: Wen-Hsiang HsiehStefan IlicNessuna valutazione finora
- Shel ElementDocumento5 pagineShel ElementGurpreet SinghNessuna valutazione finora
- ACME - 2020 - Gerocs - Inertial DriveDocumento11 pagineACME - 2020 - Gerocs - Inertial DriveGillich Gilbert-RainerNessuna valutazione finora
- Algo For Involute Octoidal Bevel Gear GenerationDocumento9 pagineAlgo For Involute Octoidal Bevel Gear GenerationTanmay MathurNessuna valutazione finora
- Kinematic Analysis of The Double Roller Tripod Joint: Yinyuan Qiu, Wen-Bin Shangguan and Yong LuoDocumento14 pagineKinematic Analysis of The Double Roller Tripod Joint: Yinyuan Qiu, Wen-Bin Shangguan and Yong Luo1DA17ME055 Harshit MDNessuna valutazione finora
- A Study On The Dynamic Analysis Modelling For High-Speed Roller BearingsDocumento10 pagineA Study On The Dynamic Analysis Modelling For High-Speed Roller BearingsRCUNessuna valutazione finora
- A Textbook of Machine Design by R.S.khurMI and J.K.guptADocumento17 pagineA Textbook of Machine Design by R.S.khurMI and J.K.guptAVikas SharmaNessuna valutazione finora
- The Generation Principle and Mathematical Models of A Novel Cosine Gear DriveDocumento14 pagineThe Generation Principle and Mathematical Models of A Novel Cosine Gear DriveRobin MachargNessuna valutazione finora
- Annasaheb Dange College of Engineering and Technology, AshtaDocumento10 pagineAnnasaheb Dange College of Engineering and Technology, AshtaDipak BhagatNessuna valutazione finora
- High Frequency Railway Vehicle Track Dynamics Through Flexible Rotating WheelsetsDocumento14 pagineHigh Frequency Railway Vehicle Track Dynamics Through Flexible Rotating WheelsetsAli KasimNessuna valutazione finora
- Machine Design Lab: Analyzing Automotive TransmissionsDocumento21 pagineMachine Design Lab: Analyzing Automotive TransmissionsDIEGO ORIGINALES MONTOYANessuna valutazione finora
- Splines and SerrationsDocumento6 pagineSplines and SerrationsMikel1020Nessuna valutazione finora
- Determination of Surface Singularities of A Cycloidal Gear Drive With Inner MeshingDocumento15 pagineDetermination of Surface Singularities of A Cycloidal Gear Drive With Inner MeshingtashanzhiyuNessuna valutazione finora
- Cycloid Gear FemDocumento11 pagineCycloid Gear Femmuratti74Nessuna valutazione finora
- Three Axis Rotary PlatformDocumento6 pagineThree Axis Rotary PlatformSudhanwa KulkarniNessuna valutazione finora
- Tech Paper - Dynamic Analysis of Rotary MachineDocumento11 pagineTech Paper - Dynamic Analysis of Rotary MachineSid ShendgeNessuna valutazione finora
- The Generation Principle and MathematicaDocumento14 pagineThe Generation Principle and MathematicaGál Károly-IstvánNessuna valutazione finora
- Planetary Gear: CS 285 Solid Modelling (FALL 2011) Eric Lu and Jessie JinDocumento8 paginePlanetary Gear: CS 285 Solid Modelling (FALL 2011) Eric Lu and Jessie JinAmanda StaceyNessuna valutazione finora
- Stiffness of GearDocumento14 pagineStiffness of GearShivkant SharmaNessuna valutazione finora
- Ac 2011-838: Machine Design Lab: Using Automotive Trans-Mission Examples To Reinforce Understanding of Gear Train AnalysisDocumento21 pagineAc 2011-838: Machine Design Lab: Using Automotive Trans-Mission Examples To Reinforce Understanding of Gear Train AnalysisNguyenNessuna valutazione finora
- 1984017959Documento238 pagine1984017959atorx74Nessuna valutazione finora
- Square Hole Drilling MachineDocumento4 pagineSquare Hole Drilling Machineedisonmech_erfNessuna valutazione finora
- AMME2500 Assignment 3Documento12 pagineAMME2500 Assignment 3Drago6678Nessuna valutazione finora
- DimensionnementDocumento10 pagineDimensionnementSliim AmiriNessuna valutazione finora
- Spatial_Kinematics_Modeling_and_Simulation_of_WheeDocumento12 pagineSpatial_Kinematics_Modeling_and_Simulation_of_Wheesumeetsaini88Nessuna valutazione finora
- Spatial Kinematics Modeling and Simulation of WheeDocumento12 pagineSpatial Kinematics Modeling and Simulation of WheeAdson JuniorNessuna valutazione finora
- GearsDocumento3 pagineGearsSridhar KanagarajNessuna valutazione finora
- Orientation Order Analysis of Spherical Four-Bar MechanismsDocumento4 pagineOrientation Order Analysis of Spherical Four-Bar MechanismsSurya KiranNessuna valutazione finora
- Epicyclic Gear TrainDocumento6 pagineEpicyclic Gear TrainLow Kian JinNessuna valutazione finora
- JMSIC - Spatial Kinematics Modeling and Simulation of Wheel LoaderDocumento11 pagineJMSIC - Spatial Kinematics Modeling and Simulation of Wheel LoaderfpttmmNessuna valutazione finora
- Six Revolute PDFDocumento13 pagineSix Revolute PDFParag NaikNessuna valutazione finora
- Theory of Machines - Sheet1Documento2 pagineTheory of Machines - Sheet1Dr-Nouby Mahdy GhazalyNessuna valutazione finora
- Applied Sciences: Evaluating The E Track Performance in High-Speed Railway Systems Using Co-Simulation AnalysisDocumento17 pagineApplied Sciences: Evaluating The E Track Performance in High-Speed Railway Systems Using Co-Simulation AnalysisДенис НедоступовNessuna valutazione finora
- Backlash Analysis of a New Planetary GearingDocumento8 pagineBacklash Analysis of a New Planetary GearingSerkanNessuna valutazione finora
- Pembuatan Alat Peraga Planetary Gear Set Sebagai Media Pembelajaran Power TrainDocumento5 paginePembuatan Alat Peraga Planetary Gear Set Sebagai Media Pembelajaran Power TrainSadli BreakerzNessuna valutazione finora
- Dynamic Analysis of Helical Gears Supported by Rolling Element BearingsDocumento18 pagineDynamic Analysis of Helical Gears Supported by Rolling Element BearingsankitsarvaiyaNessuna valutazione finora
- Mechanical Systems and Signal Processing: Pengfei Wang, Hongyang Xu, Hui Ma, Hongzheng Han, Yang YangDocumento31 pagineMechanical Systems and Signal Processing: Pengfei Wang, Hongyang Xu, Hui Ma, Hongzheng Han, Yang YangVivek ParmarNessuna valutazione finora
- Analysis of Systems With Complex GearsDocumento10 pagineAnalysis of Systems With Complex Gearslk700615Nessuna valutazione finora
- Structural Analysis of Three Stage Coupled Planetary Gear Train and Determination of EfficiencyDocumento3 pagineStructural Analysis of Three Stage Coupled Planetary Gear Train and Determination of EfficiencyInnovative Research PublicationsNessuna valutazione finora
- Analysis of Thread Guide Drive MechanismDocumento3 pagineAnalysis of Thread Guide Drive MechanismYashavant PatelNessuna valutazione finora
- Five-Link Rear Suspension System Synthesis and AnalysisDocumento18 pagineFive-Link Rear Suspension System Synthesis and AnalysisManish RajNessuna valutazione finora
- Journal of Sound and Vibration: Tristan M. Ericson, Robert G. ParkerDocumento26 pagineJournal of Sound and Vibration: Tristan M. Ericson, Robert G. ParkerjocepezNessuna valutazione finora
- Transfer Matrix Method To Vibration Analysis of Rotors With Coupler OffsetsDocumento13 pagineTransfer Matrix Method To Vibration Analysis of Rotors With Coupler OffsetsPablo Marcelo Garnica TejerinaNessuna valutazione finora
- Tooth-Grinding of Cylindrical Tooth-WheelsDocumento5 pagineTooth-Grinding of Cylindrical Tooth-Wheelssunil481Nessuna valutazione finora
- Kinematic Model of a Four Mecanum Wheeled Mobile RobotDocumento4 pagineKinematic Model of a Four Mecanum Wheeled Mobile RobotalienkanibalNessuna valutazione finora
- Gear Train PDFDocumento10 pagineGear Train PDFABHIJITNessuna valutazione finora
- Project in MD Lab - 1Documento8 pagineProject in MD Lab - 1Art Angel GingoNessuna valutazione finora
- KTOM Exam Paper With SolutionDocumento17 pagineKTOM Exam Paper With Solutionhiren koriyaNessuna valutazione finora
- JMSIC - Spatial Kinematics Modeling and Simulation of Wheel LoaderDocumento11 pagineJMSIC - Spatial Kinematics Modeling and Simulation of Wheel LoaderHugo MagnoNessuna valutazione finora
- Gear Shape Optimization For Non-Circular GearingDocumento9 pagineGear Shape Optimization For Non-Circular GearingRafael ZanettiNessuna valutazione finora
- 02 MMT 6rDocumento13 pagine02 MMT 6rarmin_kunosicNessuna valutazione finora
- Planar Linkage Synthesis: A modern CAD based approachDa EverandPlanar Linkage Synthesis: A modern CAD based approachNessuna valutazione finora
- Robot Manipulators: Modeling, Performance Analysis and ControlDa EverandRobot Manipulators: Modeling, Performance Analysis and ControlNessuna valutazione finora
- Classical and Modern Approaches in the Theory of MechanismsDa EverandClassical and Modern Approaches in the Theory of MechanismsNessuna valutazione finora
- Performance-Based Gear Metrology: Kinematic - Transmission - Error Computation and DiagnosisDa EverandPerformance-Based Gear Metrology: Kinematic - Transmission - Error Computation and DiagnosisNessuna valutazione finora
- A Design of Speed Reducer With Trapezoidal Tooth ProfileDocumento6 pagineA Design of Speed Reducer With Trapezoidal Tooth ProfileAlejandro ChavezNessuna valutazione finora
- Gear Geometry of Cycloid DrivesDocumento13 pagineGear Geometry of Cycloid DrivesAlejandro ChavezNessuna valutazione finora
- Design and Strength Analysis Methods of The TrochoidalDocumento15 pagineDesign and Strength Analysis Methods of The TrochoidalAlejandro ChavezNessuna valutazione finora
- A Design of Speed Reducer With Trapezoidal Tooth ProfileDocumento6 pagineA Design of Speed Reducer With Trapezoidal Tooth ProfileAlejandro ChavezNessuna valutazione finora
- 31,32Documento2 pagine31,32Alejandro ReynagaNessuna valutazione finora
- Roger Ebert's Review of Sci-Fi Thriller The Island (2005Documento4 pagineRoger Ebert's Review of Sci-Fi Thriller The Island (2005Alejandro ChavezNessuna valutazione finora
- Data SheetDocumento74 pagineData SheetAlejandro ChavezNessuna valutazione finora
- Tip30c1 PDFDocumento5 pagineTip30c1 PDFDanielAlvarezNessuna valutazione finora
- Probset4. EnergybalancesDocumento4 pagineProbset4. EnergybalancesUmmu Qurratul Aini MansorNessuna valutazione finora
- AS 1056.1-1991 Storage Water Heaters - General RequirementsDocumento43 pagineAS 1056.1-1991 Storage Water Heaters - General RequirementsChetan ChopraNessuna valutazione finora
- 4 UreviewDocumento34 pagine4 Ureviewumchemist2Nessuna valutazione finora
- PART-66 Training - Aircraft Maintenance LicenceDocumento11 paginePART-66 Training - Aircraft Maintenance LicenceFemi AgbanaNessuna valutazione finora
- Ducato 290 Handbook 05-15 PDFDocumento387 pagineDucato 290 Handbook 05-15 PDFDaniNessuna valutazione finora
- High-Temperature High-Strength Nickel-Base Alloys: A Practical Guide To The Use of Nickel-Containing Alloys N 393Documento86 pagineHigh-Temperature High-Strength Nickel-Base Alloys: A Practical Guide To The Use of Nickel-Containing Alloys N 393DNH RND - VijaykumarNessuna valutazione finora
- ADAMS Lecture 1 Introduction To ADAMSDocumento19 pagineADAMS Lecture 1 Introduction To ADAMSAneesh KalraNessuna valutazione finora
- CCMC Canadian Code Compliance Evaluation - National Research Council CanadaDocumento14 pagineCCMC Canadian Code Compliance Evaluation - National Research Council CanadaMark AdamsNessuna valutazione finora
- ASTM A153 Guide for Galvanized Hardware & FastenersDocumento5 pagineASTM A153 Guide for Galvanized Hardware & FastenersMekhmanNessuna valutazione finora
- O&Msec3 CFB Boiler OperationDocumento55 pagineO&Msec3 CFB Boiler Operationbagus efendiNessuna valutazione finora
- Corporate Brochure Part No. TitleDocumento15 pagineCorporate Brochure Part No. TitleAnonymous V9fdC6Nessuna valutazione finora
- Module 5.2a: Gas Laws Part 1Documento26 pagineModule 5.2a: Gas Laws Part 1Ryan PazonNessuna valutazione finora
- PA66 Ultramid A4H BASFDocumento2 paginePA66 Ultramid A4H BASFAlan MoraisNessuna valutazione finora
- Circular Motion Week 2Documento8 pagineCircular Motion Week 2Solace HusseinNessuna valutazione finora
- DIFFERENTIALDocumento4 pagineDIFFERENTIALsaffrinNessuna valutazione finora
- EASA Piston Engine Module Tutorial QuestionsDocumento19 pagineEASA Piston Engine Module Tutorial QuestionsJoseph Timoney100% (5)
- TM 5-811-6 Generator and Electrical Facilities DesignDocumento26 pagineTM 5-811-6 Generator and Electrical Facilities DesignrockclaudiuNessuna valutazione finora
- Renault Master BrochureDocumento37 pagineRenault Master BrochureAdriano Freire SilvaNessuna valutazione finora
- Concrete Mixer Truck Chassis CB318Documento256 pagineConcrete Mixer Truck Chassis CB318Rendy fahleviNessuna valutazione finora
- PsychrometricsDocumento32 paginePsychrometricskdsahooNessuna valutazione finora
- Materi TM-300 28 Feb 2013Documento26 pagineMateri TM-300 28 Feb 2013kharimulazizNessuna valutazione finora
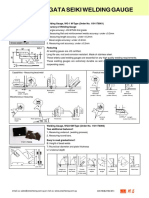
- Niigata Welding GaugeDocumento2 pagineNiigata Welding GaugeFriady HalimNessuna valutazione finora
- A17-23495A Installation Manual KS12-BCV-413B L1100Documento19 pagineA17-23495A Installation Manual KS12-BCV-413B L1100davalgonzalezNessuna valutazione finora
- Your First Day Lifeguarding: How To Vacuum and Backwash A PoolDocumento4 pagineYour First Day Lifeguarding: How To Vacuum and Backwash A PoolMattMonroeNessuna valutazione finora
- Mini Fragment Implants and InstrumentsDocumento13 pagineMini Fragment Implants and InstrumentsMarc KleinNessuna valutazione finora
- The Influence of Compressibility On The Aerodynamics of An Inverted Wing in Ground EffectDocumento12 pagineThe Influence of Compressibility On The Aerodynamics of An Inverted Wing in Ground EffectSamson Paul PintoNessuna valutazione finora
- Multistage Boiler Feed Water PumpDocumento12 pagineMultistage Boiler Feed Water Pumpbalaji_jayadeva9546100% (1)
- HP0 PumpDocumento70 pagineHP0 PumpDenisEcheverriNessuna valutazione finora